 【EASY EAI Nano开源套件试用体验】3摄像头与屏幕的使用
【EASY EAI Nano开源套件试用体验】3摄像头与屏幕的使用

本文来源电子发烧友社区,作者:码农爱学习, 帖子地址:https://bbs.elecfans.com/jishu_2307434_1_1.html
EASY EAI Nano屏幕显示摄像头测试(附上体验视频,详见作者原贴)
本篇进行EASY EAI Nano的屏幕显示与摄像头显示测试,先来看下最终的测试效果:

本篇测评参考了官方文档的一些内容:https://www.easy-eai.com/document_details/3/129
1 摄像头
1.1 MIPI CSI-2接口简介
MIPI CSI-2接口是由MIPI联盟下的Camera工作组指定的CSI(Camera Serial Interface)的第2版接口标准,主要由应用层、协议层、物理层组成,最大支持4个虚拟通道传输数据。
EASY EAI Nano的双面摄像头,包括一个RGB摄像头和一个红外摄像头,都是MIPI CSI-2接口。
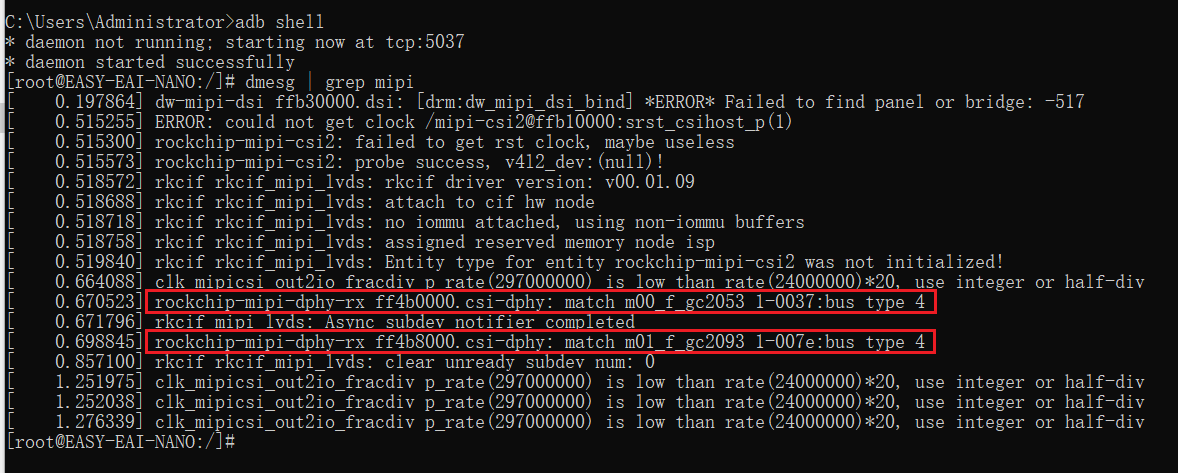
通过指令检查EASY EAI nano的MIPI-CSI2接口模块是否正常工作
dmesg | grep mipi
1.2 三种类型的摄像头
1.2.1 RGB摄像头与IR摄像头
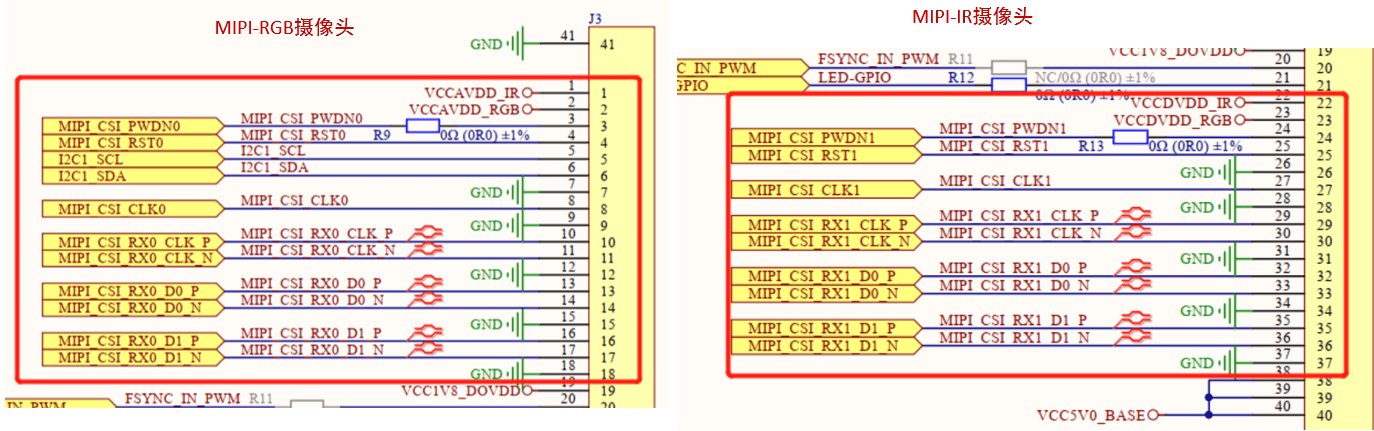
MIPI CSI-2的RGB摄像头在EASY EAI Nano套件下的位置定义如下所示,占用J3的bit1~18
MIPI CSI-2的红外摄像头在EASY EAI Nano套件下的位置定义如下所示,占用J3的bit22~37
1.2.2 USB摄像头
USB摄像头是基于UVC驱动工作的,
USB设备具有热插拔、易扩展等特性,故应用场合十分广泛。
在Linux系统通过sysfs管理USB设备。
EASY EAI nano评估套件上集成了多路USB接口,其中有2路USB2.0 Host、1路USB2.0 Device。
1.3 摄像头操作的API介绍
EASY EAI nano已库文件+头文件的形式提供了摄像头的使用,摄像头的底层操作逻辑看不到,我们只需要关系头文件中API接口的使用方法即可。
| 选项 | 描述 |
|---|---|
| 头文件目录 | -I easyeai-api/peripheral_api/camera |
| 库文件目录 | -L easyeai-api/ peripheral_api/camera |
| 库连接参数 | -lcamera |
easyeai-api/peripheral_api/camera/camera.h中的主要接口
/* usb camera */
int usbcamera_init(int bus, int port, int width, int height, int rot);
void usbcamera_exit(int bus, int port);
int usbcamera_getframe(int bus, int port, char *pbuf);
void usbcamera_preset_fps(int fps);
/* rgb camera */
int rgbcamera_init(int width, int height, int rot);
void rgbcamera_exit(void);
int rgbcamera_getframe(char *pbuf);
void rgbcamera_set_format(int format);
/* ir camera */
int ircamera_init(int width, int height, int rot);
void ircamera_exit(void);
int ircamera_getframe(char *pbuf);
void ircamera_set_format(int format);
1.4 测试例程
三种摄像头的使用方式类似,RGB摄像头IR摄像头的使用方式几乎一样
RGB/IR摄像头的使用:
// 打开摄像头
#define CAMERA_WIDTH 720
#define CAMERA_HEIGHT 1280
ret = rgbcamera_init(CAMERA_WIDTH, CAMERA_HEIGHT, 90);
//获取图片
ret = rgbcamera_getframe(pbuf);
//保存图片
fp = fopen("/tmp/photo", "w");
fwrite(pbuf, 1, IMAGE_SIZE, fp);
fclose(fp);
//释放摄像头
rgbcamera_exit();
USB摄像头的使用:
// 打开摄像头
#define CAMERA_WIDTH 720
#define CAMERA_HEIGHT 1280
ret = usbcamera_init(USB2_0, USB_DIRECT, CAMERA_WIDTH, CAMERA_HEIGHT, 90);
//获取图片
ret = usbcamera_getframe(USB2_0, USB_DIRECT, pbuf);
//保存图片
fp = fopen("/tmp/photo", "w");
fwrite(pbuf, 1, IMAGE_SIZE, fp);
fclose(fp);
//释放USB摄像头
usbcamera_exit(USB2_0, USB_DIRECT);
以上测试函数,会用摄像头拍一张照片,并保存到/tmp目录中。
2 显示屏
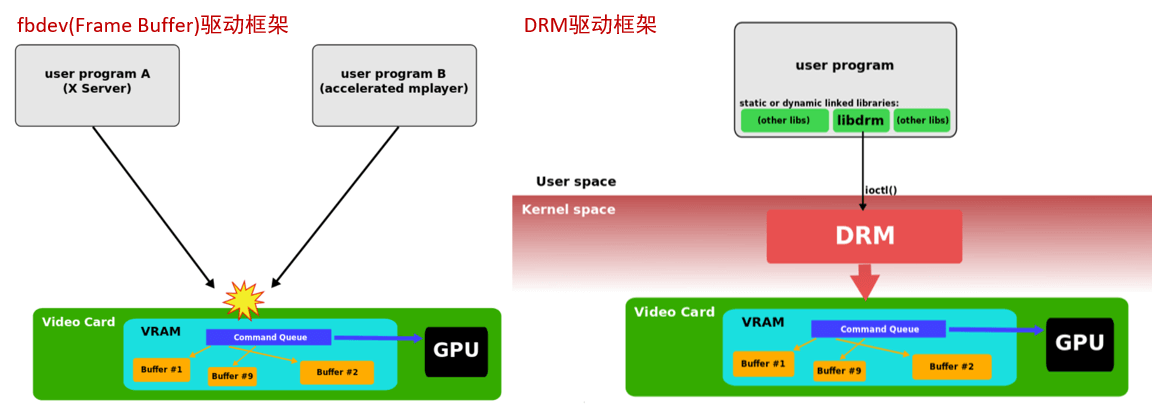
2.1 DRM驱动框架介绍
EASY EAI nano评估板上默认支持5寸显示屏(带电容触摸屏),分辨率为720x1280,EASY EAI nano产品使用DRM(Direct Rendering Manager)驱动框架实现多应用同时使用同一个显示器的目的,而EASY-EAI-Toolkit的display库则是对DRM的封装。
2.2 显示屏操作的API介绍
头文件与库文件
| 选项 | 描述 |
|---|---|
| 头文件目录 | -I easyeai-api/peripheral_api/display |
| 库文件目录 | -L easyeai-api/ peripheral_api/display |
| 库链接参数 | -ldisplay |
easyeai-api/peripheral_api/display/disp.h中的主要接口
/* 公共api */
void disp_preset_uiLayer(int enable);
/* 适合初次使用 */
int disp_init(int width, int height); //默认输入RGB888
void disp_exit(void);
void disp_commit(void *ptr, int data_len);
/* pro, 显示多路视频时,或旋转输入图像角度,或裁切图像*/
int disp_init_pro(disp_screen_t *screen);
void disp_exit_pro(void);
void disp_commit_pro(void *ptr, int chn, int data_len);
一些参数的含义:
- width:显示区域宽度
- height:显示区域高度
- ptr:用户空间的显示内容空间
- data_len:输入图像数据内存长度
- screen:显示屏属性,包含显示区域大小、子窗口的描述等
- chn:目标窗口索引号
结构体定义
typedef struct disp_win {
int enable;
int win_x;
int win_y;
int win_w;
int win_h;
int rotation;//顺时针旋转输入图像角度,支持90、180、270、0度
IMAGE_TYPE_E in_fmt;
int in_w;//输入图像宽度
int in_h;//输入图像高度
int HorStride;//输入图像水平步长
int VirStride;//输入图像垂直步长
/* 如果不设置crop系列参数,则默认拉伸原图铺满整个win ;
*设置crop则先裁切再把裁切后的图像铺满整个win,以便保持图像宽高比例
*/
int crop_x;//裁切起始X坐标(基于旋转前图像的坐标系)
int crop_y;//裁切起始Y坐标(基于旋转前图像的坐标系)
int crop_w;//裁切后的图像宽度(以旋转前的图像为参考)
int crop_h;//裁切后的图像高度(以旋转前的图像为参考)
} disp_win_t;
typedef struct disp_screen {
int screen_width;
int screen_height;
disp_win_t wins[VMIX_MAX_CHN_NUM];
} disp_screen_t;
2.3 测试例程
参考官方给的例程,进行修改,增加通过参数显示指定图片的功能,测试不同图片显示到屏幕的效果。
my-display.c的主程序如下:
int main(int argc, char *argv[])
{
char *img_path = IMAGE_PATH;
if (argc == 2)
{
img_path = argv[1];
printf("recv:%sn", img_path);
}
int ret = 0;
char *pbuf = NULL;
FILE *fp = NULL;
disp_screen_t screen = {0};
signal(SIGINT, sigterm_handler);
/* 1、准备图像数据 */
pbuf = (char *)malloc(IMAGE_SIZE);
if (!pbuf) {
printf("malloc error: %s, %dn", __func__, __LINE__);
return -1;
}
fp = fopen(img_path, "r");
if (!fp) {
printf("fopen error: %s, %dn", __func__, __LINE__);
return -1;
}
ret = fread(pbuf, 1, IMAGE_SIZE, fp);
fclose(fp);
if (ret != IMAGE_SIZE) {
printf("fread error: %s, %dn", __func__, __LINE__);
free(pbuf);
return -1;
}
/* 2、初始化显示 */
screen.screen_width = DISP_WIDTH;
screen.screen_height = DISP_HEIGHT;
screen.wins[0].enable = 1;
screen.wins[0].win_x = 0;
screen.wins[0].win_y = 0;
screen.wins[0].win_w = 720;
screen.wins[0].win_h = 1280;
screen.wins[0].rotation = 0;
screen.wins[0].in_fmt = IMAGE_TYPE_RGB888;
screen.wins[0].in_w = DISP_WIDTH;
screen.wins[0].in_h = DISP_HEIGHT;
screen.wins[0].HorStride = DISP_WIDTH;
screen.wins[0].VirStride = DISP_HEIGHT;
ret = disp_init_pro(&screen);
if (ret) {
printf("error func:%s, line:%dn", __func__, __LINE__);
goto exit1;
}
/* 3、提交显示 */
g_run = 1;
disp_commit_pro(pbuf, 0, IMAGE_SIZE);
while(g_run) {
sleep(1);
}
disp_exit_pro();
exit1:
free(pbuf);
pbuf = NULL;
return ret;
}
修改CMakeLists.txt,增加如下内容:
#--------------------------
# my-display
#--------------------------
link_directories(${toolkit_root}/peripheral_api/display)#-L
add_executable(my-display my-display.c)#-o
target_link_libraries(my-display pthread easymedia display)#-l
target_include_directories(my-display PRIVATE ${api_inc})#-I
在执行函数时,附加一个图片的路径参数,可以显示指定的图片:
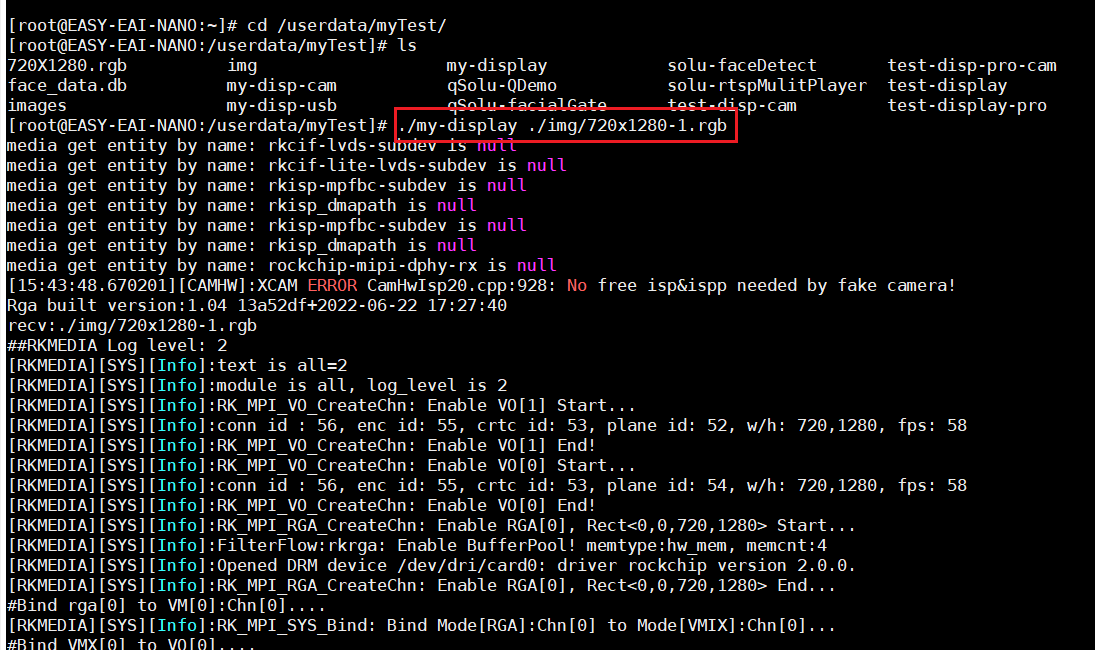
准备一些测试图片,格式为RGB888,分辨率720x1280,测试显示两张不同图片的效果:

3 摄像头+屏幕程序代码分析
参考官方的摄像头显示例程,将红外摄像头、RGB摄像头和USB摄像头采集的画面同时显示到屏幕中,改写的测试代码如下。
my-disp-cam.c的主程序如下:
int main()
{
char *prgb = NULL;
char *pir = NULL;
char *pusb = NULL;
int ret = 0;
disp_screen_t screen = {0};
bool bHasUSBCamear = false;
signal(SIGINT, sigterm_handler);
/* camera init */
ret = rgbcamera_init(CAMERA_WIDTH, CAMERA_HEIGHT, 90);
if (ret) {
printf("error func:%s, line:%dn", __func__, __LINE__);
goto exit_donothing;
}
ret = ircamera_init(CAMERA_WIDTH, CAMERA_HEIGHT, 270); //此角度由摄像头模组决定
if (ret) {
printf("error func:%s, line:%dn", __func__, __LINE__);
goto exit_freergb;
}
ret = usbcamera_init(USB2_0, USB_DIRECT, CAMERA_WIDTH, CAMERA_HEIGHT, 180);
if (ret) {
printf("error func:%s, line:%dn", __func__, __LINE__);
}
else
{
bHasUSBCamear = true;
}
/* display init */
screen.screen_width = DISP_WIDTH;
screen.screen_height = DISP_HEIGHT;
screen.wins[0].enable = 1;
screen.wins[0].in_fmt = IMAGE_TYPE_RGB888;
screen.wins[0].in_w = CAMERA_WIDTH;
screen.wins[0].in_h = CAMERA_HEIGHT;
screen.wins[0].rotation = 0;
screen.wins[0].win_x = 0;
screen.wins[0].win_y = 0;
screen.wins[0].win_w = 360;
screen.wins[0].win_h = 640;
screen.wins[1].enable = 1;
screen.wins[1].in_fmt = IMAGE_TYPE_RGB888;
screen.wins[1].in_w = CAMERA_WIDTH;
screen.wins[1].in_h = CAMERA_HEIGHT;
screen.wins[1].rotation = 0;
screen.wins[1].win_x = 360;
screen.wins[1].win_y = 0;
screen.wins[1].win_w = 360;
screen.wins[1].win_h = 640;
if (bHasUSBCamear)
{
screen.wins[2].enable = 1;
screen.wins[2].in_fmt = IMAGE_TYPE_RGB888;
screen.wins[2].in_w = CAMERA_WIDTH;
screen.wins[2].in_h = CAMERA_HEIGHT;
screen.wins[2].rotation = 0;
screen.wins[2].win_x = 0;
screen.wins[2].win_y = 640;
screen.wins[2].win_w = 720;
screen.wins[2].win_h = 640;
}
ret = disp_init_pro(&screen);
if (ret) {
printf("error func:%s, line:%dn", __func__, __LINE__);
goto exit_freergb_freeir;
}
/* alloc buffer for cap data */
prgb = (char *)malloc(IMAGE_SIZE);
if (!prgb) {
printf("error: %s, %dn", __func__, __LINE__);
ret = -1;
goto exit_freergb_freeir_freedisp;
}
pir = (char *)malloc(IMAGE_SIZE);
if (!pir) {
printf("error: %s, %dn", __func__, __LINE__);
ret = -1;
goto exit_freergb_freeir_freedisp_freeprgb;
}
if (bHasUSBCamear)
{
pusb = (char *)malloc(IMAGE_SIZE);
if (!pusb) {
printf("error: %s, %dn", __func__, __LINE__);
}
}
g_run = 1;
while(g_run) {
ret = ircamera_getframe(pir);
if (!ret) {
disp_commit_pro(pir, 0, IMAGE_SIZE);
}
ret = rgbcamera_getframe(prgb);
if (!ret) {
disp_commit_pro(prgb, 1, IMAGE_SIZE);
}
if (bHasUSBCamear)
{
ret = usbcamera_getframe(USB2_0, USB_DIRECT, pusb);
if (!ret) {
disp_commit_pro(pusb, 2, IMAGE_SIZE);
}
}
}
if (bHasUSBCamear)
{
free(pusb);
pusb = NULL;
usbcamera_exit(USB2_0, USB_DIRECT);
}
free(pir);
pir = NULL;
exit_freergb_freeir_freedisp_freeprgb:
free(prgb);
prgb = NULL;
exit_freergb_freeir_freedisp:
disp_exit_pro();
exit_freergb_freeir:
ircamera_exit();
exit_freergb:
rgbcamera_exit();
exit_donothing:
return ret;
}
修改CMakeLists.txt,增加如下内容:
#--------------------------
# my-disp-cam
#--------------------------
link_directories(${toolkit_root}/peripheral_api/display) #-L
link_directories(${toolkit_root}/peripheral_api/camera) #-L
add_executable(my-disp-cam my-disp-cam.c) #-o
target_link_libraries(my-disp-cam pthread rkaiq rkfacial rga easymedia display camera) #-l
target_include_directories(my-disp-cam PRIVATE ${api_inc}) #-I
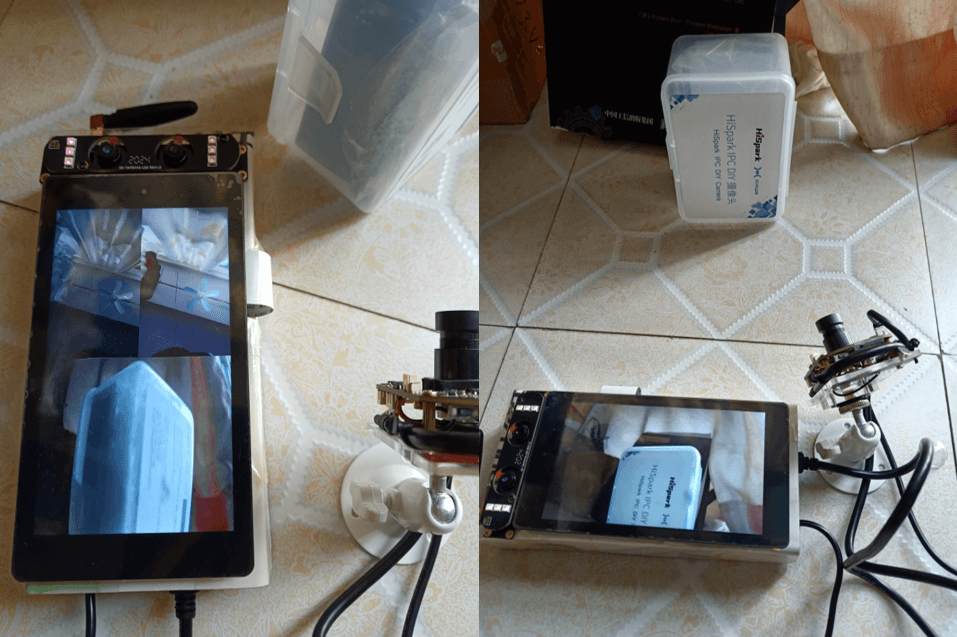
测试效果如下图左图,3个摄像头可以同时显示到屏幕,实测当摄像头运动时,屏幕显示的画面也十分流畅。
另外,还可以修改摄像头和屏幕的显示方向,如下图右图,就是将USB摄像头横屏显示的效果。
4 总结
本篇对EASY EAI Nano的屏幕和摄像头的显示功能进行测评,测试了屏幕显示不同的图片,屏幕显示不同的摄像头(MIPI红外摄像头、MIPI RGB摄像头、外接USB摄像头),以及多个摄像头的同时显示与屏幕显示方向的测试。
-
开发板
+关注
关注
26文章
6433浏览量
121115 -
EASY-EAI灵眸科技
+关注
关注
4文章
109浏览量
3729
发布评论请先 登录
瑞芯微(EASY EAI)RV1126B 网络摄像头方案




评论