 【软通动力鸿湖万联扬帆系列“竞”开发板试用体验】OpenHarmony源码编译环境攻略
【软通动力鸿湖万联扬帆系列“竞”开发板试用体验】OpenHarmony源码编译环境攻略
本文来源电子发烧友社区,作者:ITMING, 帖子地址:https://bbs.elecfans.com/jishu_2307430_1_1.html
前言
通过【软通动力鸿湖万联扬帆系列“竞”开发板试用体验】认识"竞"笔者带大家认识了扬帆系列“竞”开发板,本节将讲解OpenHarmony源码编译环境搭建以及将编译OpenHarmony标准系统烧录到“竞”开发板。
OpenHarmony标准系统位开发者提供了两种源码编译、烧录的方式:
- IDE方式:完全采用IDE(DevEco Device Tool)进行一站式开发,编译依赖工具的安装及编译、烧录、运行都通过IDE进行操作。
- 安装包方式:通过命令进行编译依赖工具的下载安装,编译操作也通过命令实现。
笔者更喜欢使用第二种安装包方式,但本文中笔者使用Ubuntu+瑞芯微开发工具的方式进行源码编译及烧录。
1 安装VMware Workstation Player
VMware Workstation Player(以下简称VM Player)是一款桌面虚拟化应用,可以在当前计算机上运行一个或多个其他操作系统,在后面小节中编译OpenHarmony源代码需要使用Ubuntu操作系统,因而小节会带读者安装VM Player。当然读者也可以选择其他的虚拟化应用程序,如需要授权的VMware Workstation Pro,或者Virtual Box,甚至读者还可以使用云虚拟机。
1.1 下载VM Player
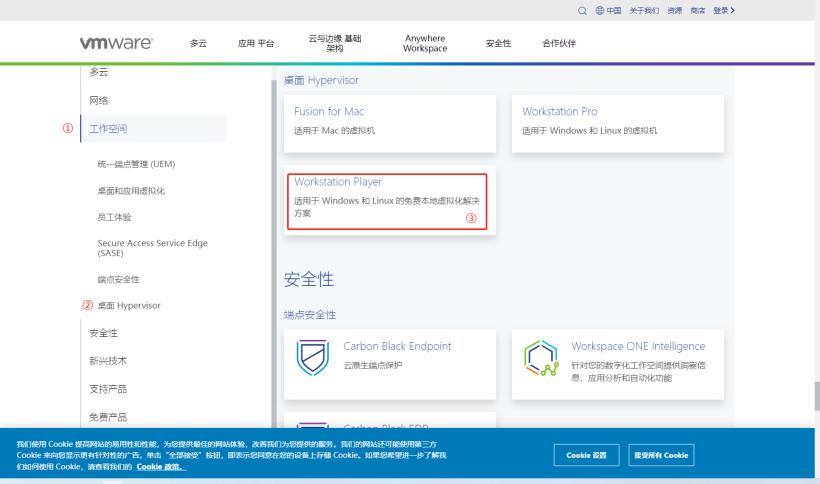
在浏览器中打开VM Player下载地址,展开左侧菜单栏下的工作空间,点击桌面Hypervisor菜单,右侧内容区定位到具体的模块,点击Workstation Player卡片进入到下载界面,如图1-1所示。
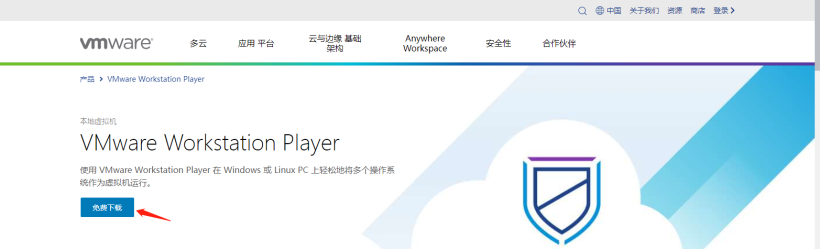
点击页面中的“免费下载”按钮,等待下载完成,如图1-2所示。
1.2 安装VM Player
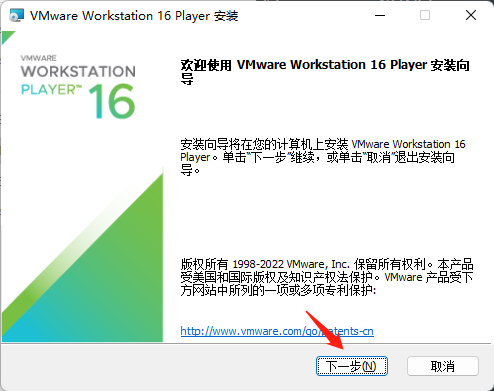
下载完成后,读者会在下载存储路径文件夹中得到VM Player安装包,如VMware-player-full-xxx.exe文件,然后双击安装包,打开安装向导,如图1-3所示。
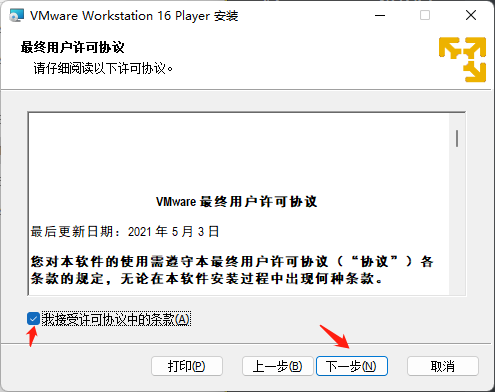
点击安装向导界面中“下一步”按钮,打开VMware最终用户许可协议,勾选“我接受许可协议中的条款”(感兴趣的话也可以读一读),如图1-4所示。
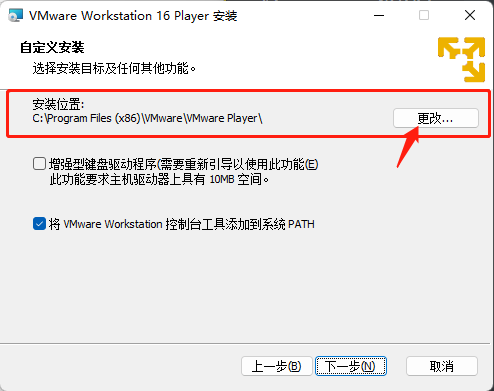
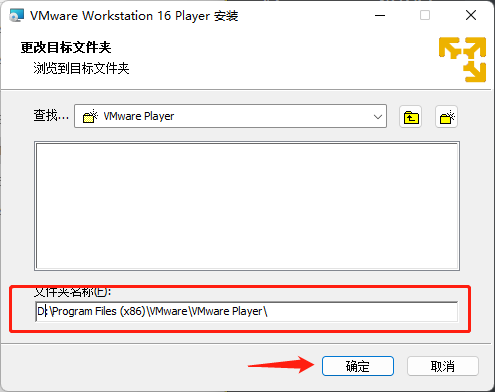
接着点击“下一步”按钮,进入到VM Player安装路径设置界面,如图1-5所示。点击“更改”按钮设置VM Player安装位置,建议安装到除C盘之外的其他磁盘中,若只有一个磁盘,则忽略,如图1-6所示。
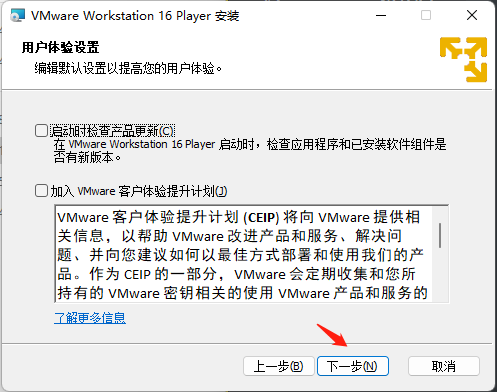
更改完路径后,点击“确定”按钮回到自定义安装界面,点击“下一步”按钮,进入用户体验设置界面,可默认,也可取消勾选,如图1-7所示。
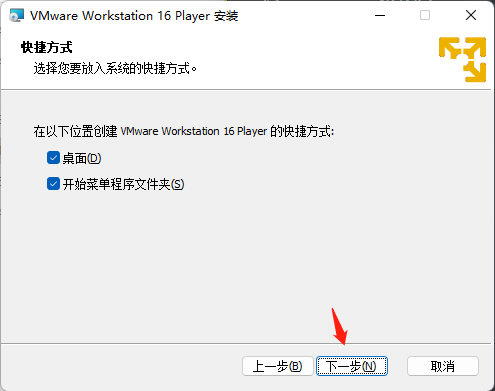
接着点击“下一步”按钮,进入快捷方式设置界面,勾选桌面和开始菜单程序文件夹,方便打开应用程序,如图1-8所示。
点击“下一步”按钮,进入到VM Player安装界面,点击“安装”按钮进行安装,如图1-9所示。
等待安装完成后,点击“完成”按钮(若个人使用点击“跳转许可”按钮即可),如图1-10所示。
1.3 初次体验VM Player
双击桌面VMware Workstation 16 Player图标,打开VM Player应用程序,如图1-11所示。

由于开发板需要连接到主机上,所以此处做额外的设置,点击菜单栏Player,选择文件选项下的首选项,在USB列表中勾选“将设备连接到主机”,如图1-12所示。

2 准备Ubuntu 20.04 系统镜像包
Ubuntu是一个以桌面为主的Linux操作系统,是编译OpenHarmony源代码必要的环境之一,打开官网下载链接下载Ubuntu 20.04桌面版(64位),如图2-1所示。

注:由于下载的文件格式为.torrent,因此需要使用迅雷下载完整的ISO文件,当然读者也可以使用国内镜像网站下载Ubuntu 20.04。
3 创建名为OpenHarmony虚拟机并安装Ubuntu操作系统
1、2小节准备了OpenHarmony源代码编译所需的虚拟机和Ubuntu操作系统镜像包,本节将带读者创建名为OpenHarmony的虚拟机并安装Ubuntu操作系统。
3.1 创建名为OpenHarmony虚拟机
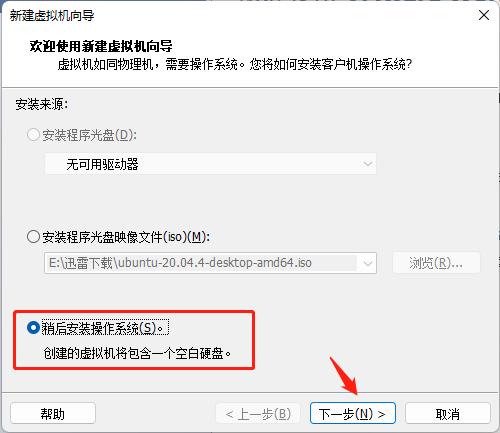
点击VM Player欢迎页中的创建新虚拟机,打开新建虚拟机向导,勾选“稍后安装操作系统”,如图3-1所示。
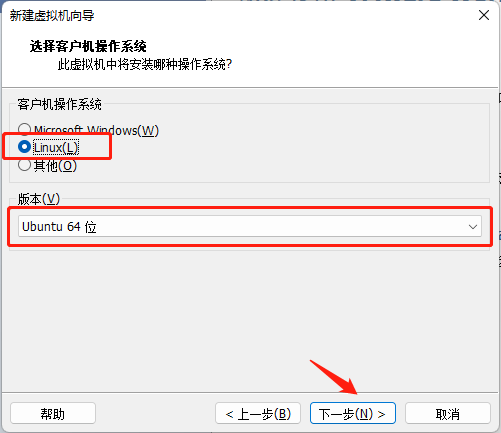
点击“下一步”按钮,打开选择客户机操作系统界面,客户操作系统选择Linux,版本选择Ubuntu 64位,如图3-2所示。
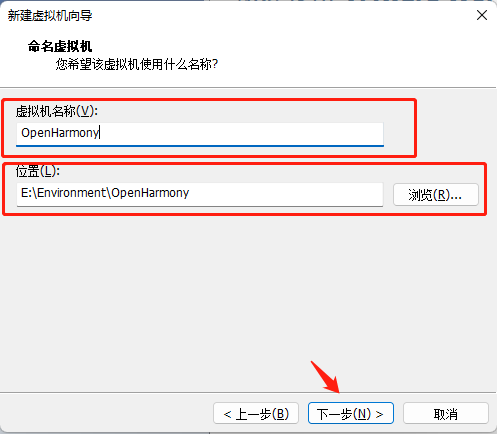
点击“下一步”按钮,打开命名虚拟机界面,设置虚拟机名称和虚拟机存储位置,如图3-3所示。
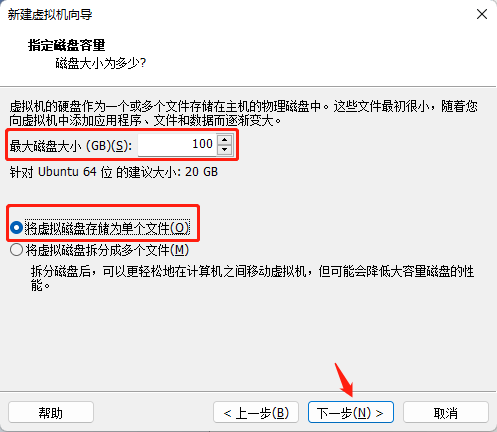
点击“下一步”按钮,打开指定磁盘容量界面,为虚拟机磁盘指定磁盘大小(建议100GB以上),同时选择虚拟磁盘存储方式,如图3-4所示。
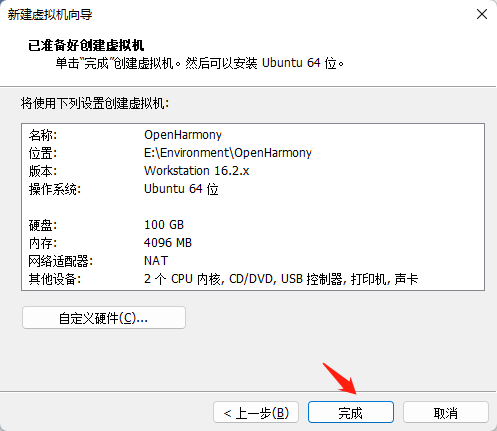
点击“下一步”按钮,打开已准备好创建虚拟机界面,该界面中显示当前创建的虚拟机各项配置。点击“完成”按钮,完成虚拟机创建,如图3-5所示。
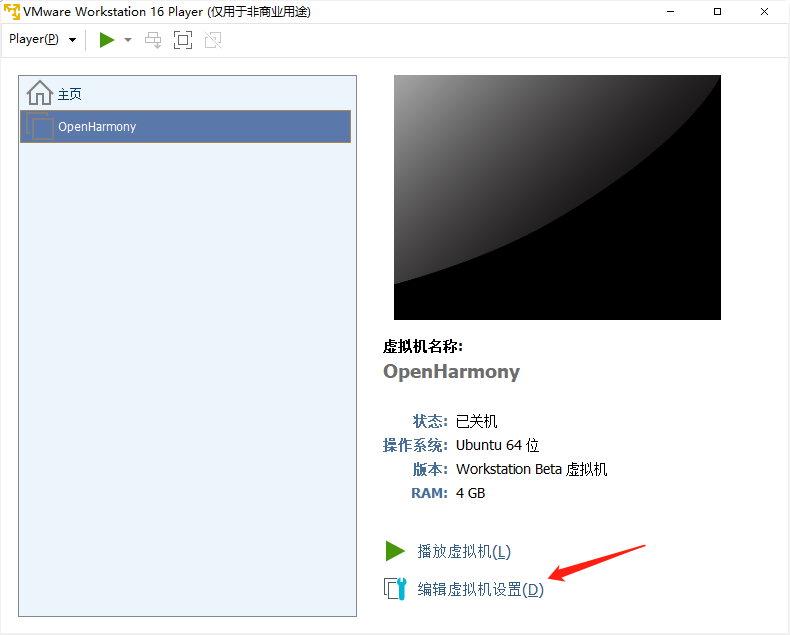
在VM Player左侧虚拟机管理区,点击OpenHarmony菜单项,切换到名称为OpenHarmony的虚拟机,然后点击“编辑虚拟机设置”,进行虚拟机细项配置,如图3-6所示。
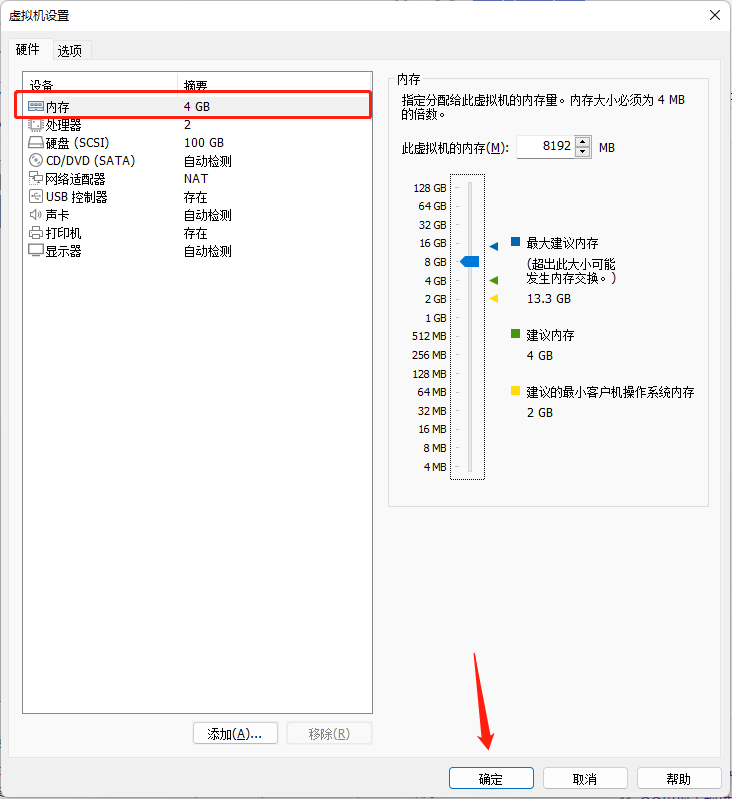
打开虚拟机设置界面默认硬件选项卡,首先设置虚拟机内存大小,建议读者设置为8G以上,然后点击“确定”按钮应用配置,如图3-7所示。
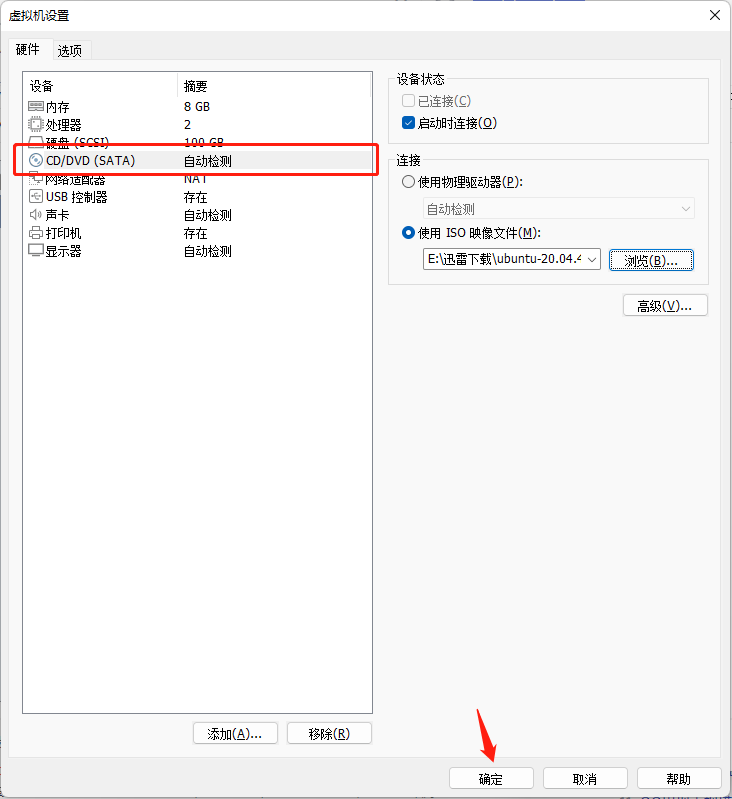
接着在硬件选项卡中,点击CD/DVD(SATA)细项配置Ubuntu镜像路径,如图3-8所示。
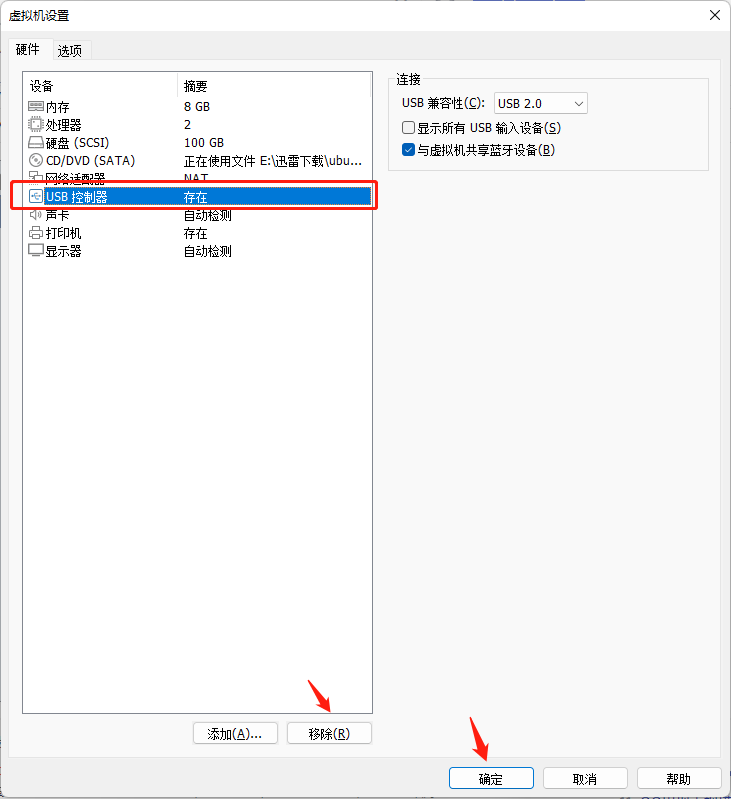
屏蔽开发板设备连接主机后虚拟机提示,移除硬件选项卡中的USB控制器,如图3-9所示。
3.2 安装Ubuntu操作系统
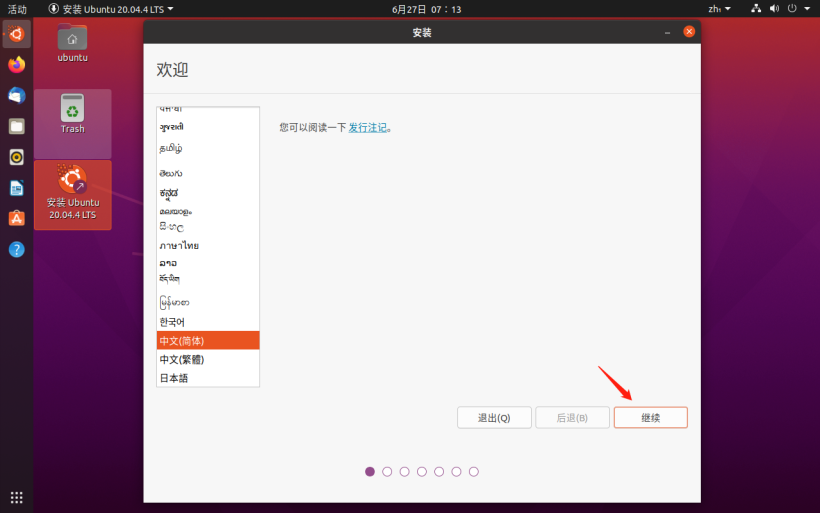
3.1小节设置虚拟机各项细项完成后,点击名称为OpenHarmony主界面的播放虚拟机,等待操作系统加载完成,进入安装Ubuntu操作系统安装向导界面,并选择语言,如图3-10所示。

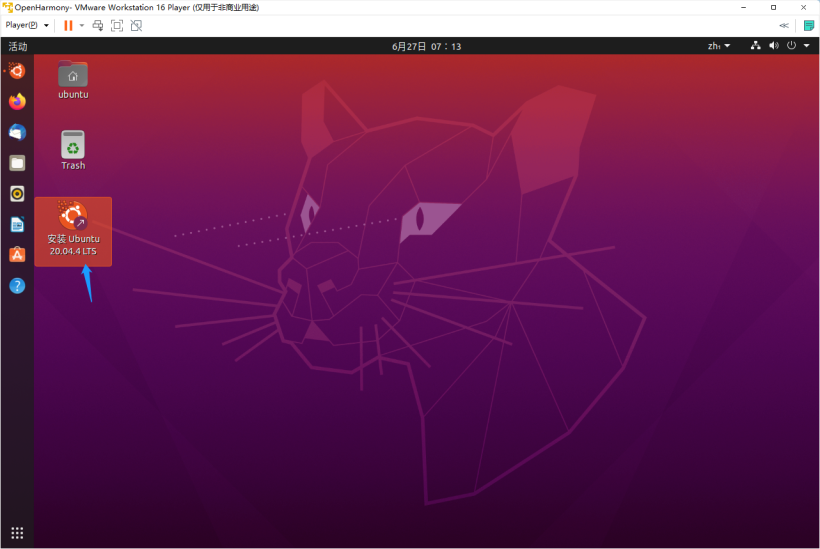
在安装向导界面,有“试用Ubuntu”和“安装Ubuntu”两个按钮选项,为了规避安装时存在部分界面无法全显的问题,这儿选择点击“试用Ubuntu”按钮,进入Ubuntu操作系统桌面后,打开终端,输入xrandr -s 1280x800设置分辨率。
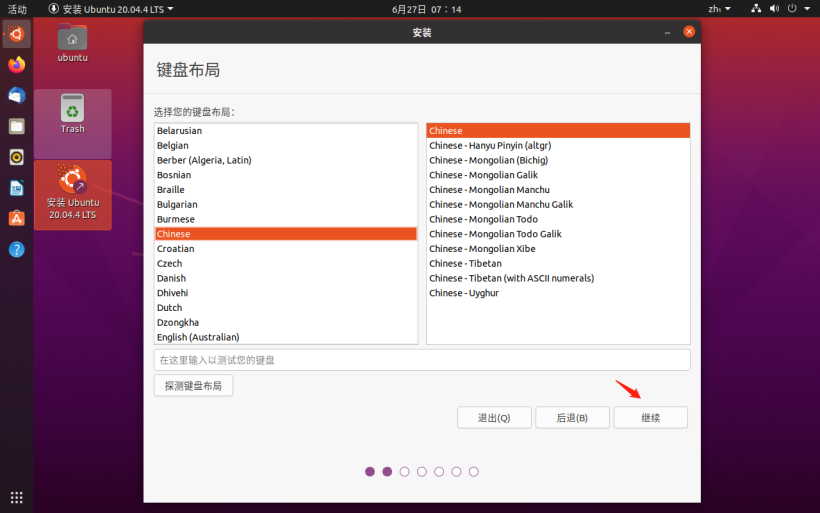
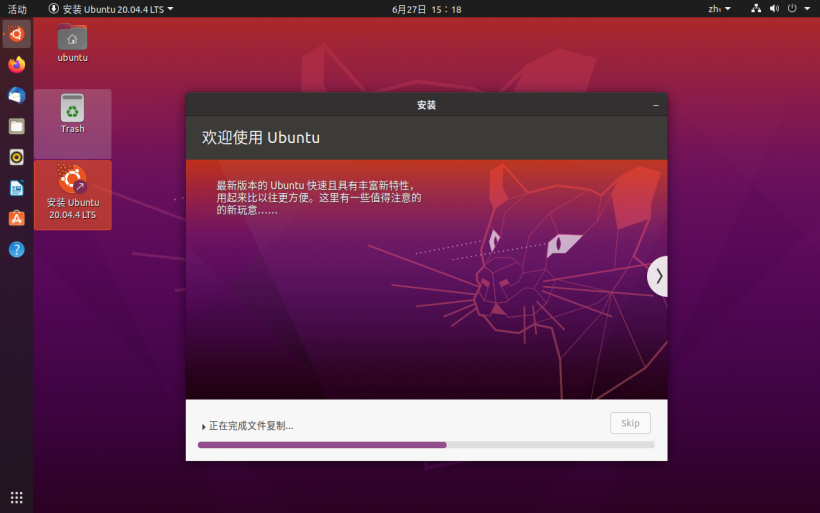
接着双击Ubuntu桌面“安装Ubuntu 20.04.4 LTS”图标,进入真实安装向导界面,整个安装如图3-11~19所示。





4 准备OpenHarmony源码编译环境
在1~3小节为OpenHarmony源码编译准备好了前置约束条件,本小节将带读者搭建OpenHarmony源码编译环境。在正式开始之前,读者需要先将Ubuntu软件源改为国内镜像地址,打开设置-->关于-->软件更新,在Ubuntu软件页签中,更改软件源,如图4-1所示。
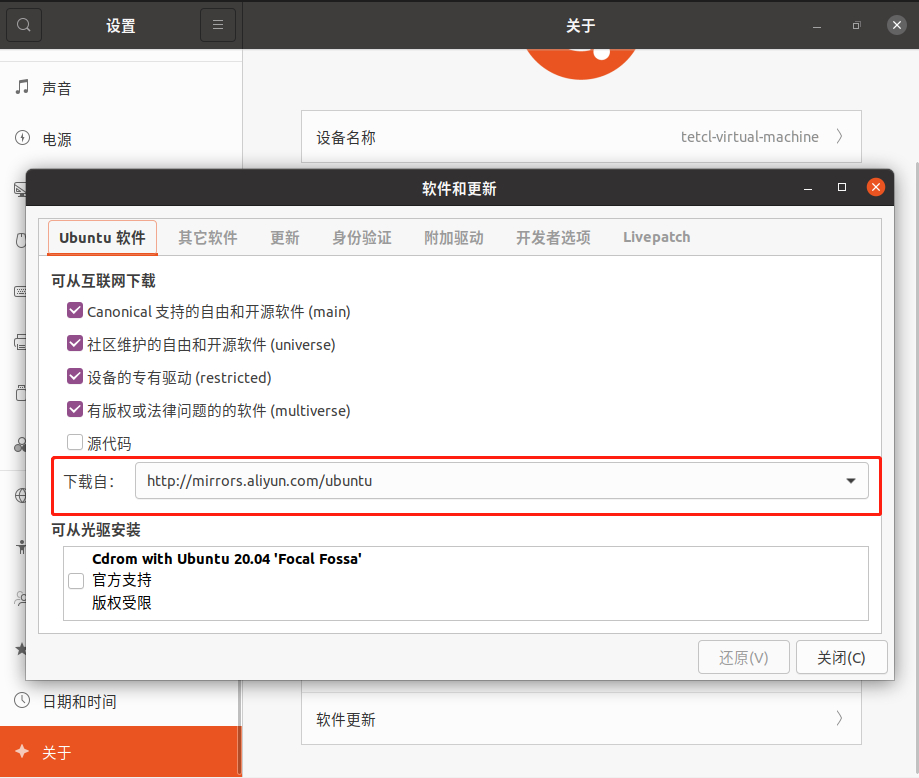
注:更改完成后,打开终端输入sudo apt-get update和sudo apt-get upgrade进行同步。
4.1 配置Ubuntu环境
启动上节准备安装好的Ubuntu操作系统虚拟机,打开终端,执行以下命令检查Shell环境是否为bash,如图4-2所示。
ls -l /bin/sh

如图为dash,因此执行以下命令进行更改,如图4-3所示。
sudo dpkg-reconfigure dash
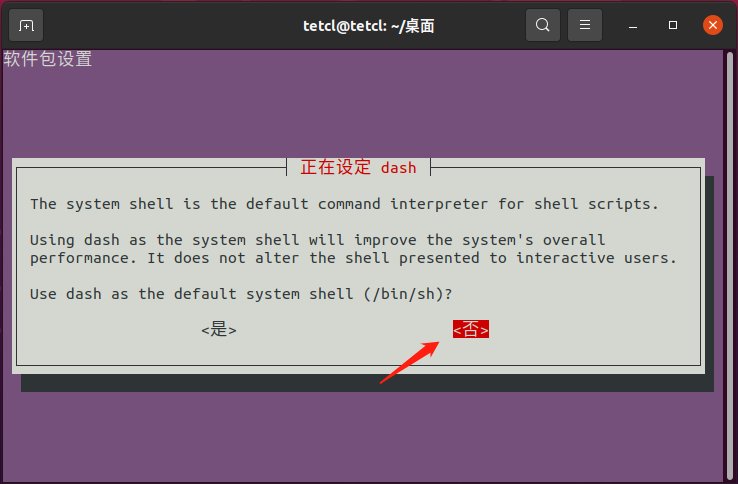
注:更改完成后,执行图4-2命令再次检查是否切换成功。
4.2 安装DevEco Device Tool软件包。
- 下载最新的DevEco Studio ToolLinux(64-bit)版本,如图4-4所示。

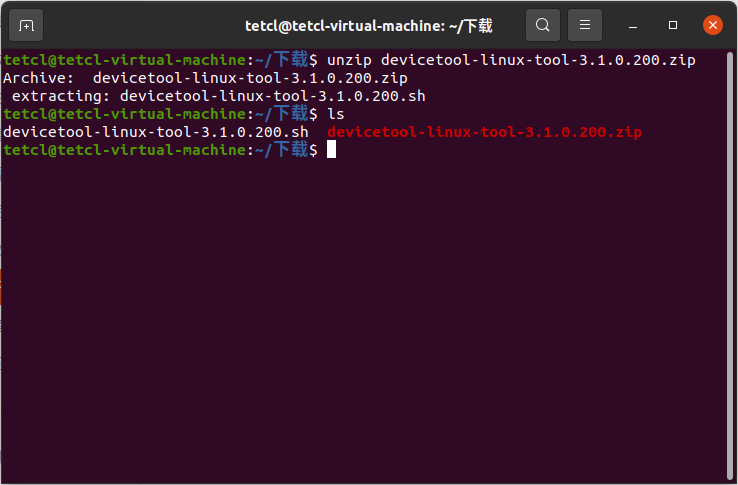
- 执行以下命令解压下载的devicetool-linux-tool-3.1.0.200.zip,如图4-5所示。
unzip devicetool-linux-tool-3.1.0.200.zip
- 执行命令赋予安装文件可执行权限。
chomd u+x devicetool-linux-tool-3.1.0.200.sh
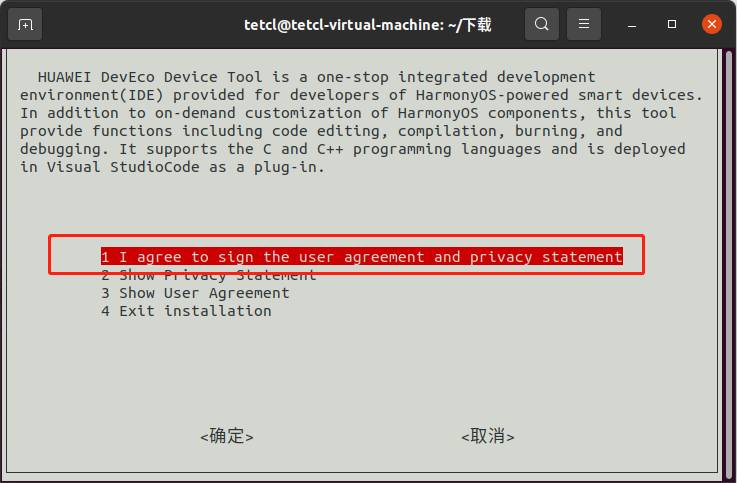
- 执行以下命令,安装DevEco Device Tool,在用户协议和隐私声明签署界面,选择同意项(使用TAB键切换到“确定”按钮),如图4-6所示。
sudo ./devicetool-linux-tool-3.1.0.200.sh
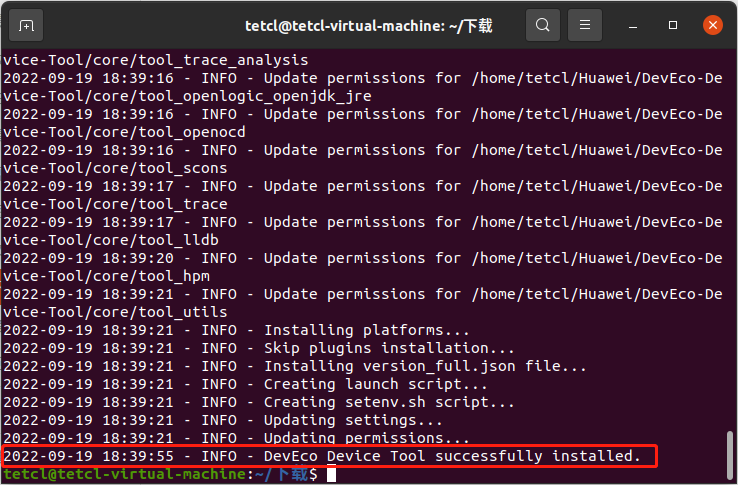
等待安装完成后,终端界面会显示“DevEco Device Tool successfully installed.”时,则证明安装成功,如图4-7所示。
4.3 获取并编译OpenHarmony源码
OpenHarmony是由开放原子开源基金会(OpenAtom Foundation)孵化及运营的开源项目,其代码是以组件的形式开放,开发者可以通过如下其中一种方式获取:
笔者使用第一种方式从gitee中获取OpenHarmony源代码.
-
使用以下命令安装
git和git-lfs,如图4-8所示。
sudo apt-get install git git-lfs
- 执行以下命令为git配置用户信息(一定要有自己的码云账号),如图4-9所示。
git config --global user.name "用户名"
git config --global user.email "邮箱地址"
git config --global credential.helper store
-
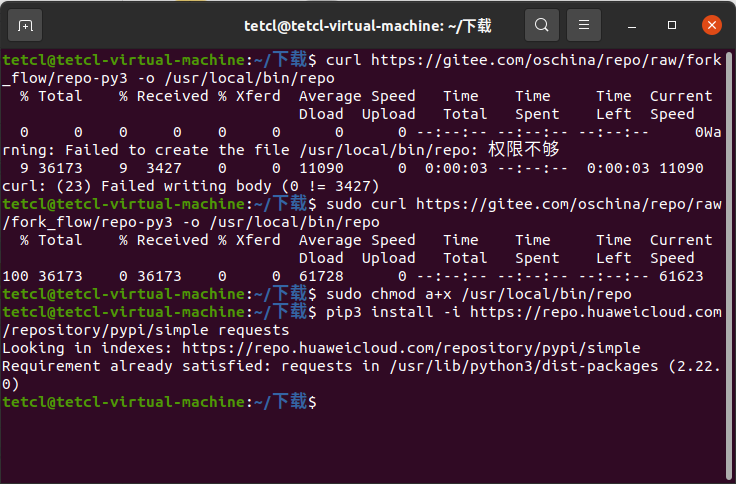
执行以下命令安装码云
repo工具,如图4-10所示。
curl https://gitee.com/oschina/repo/raw/fork_flow/repo-py3 -o /usr/local/bin/repo #如果没有权限,可下载至其他目录,并将其配置到环境变量中
chmod a+x /usr/local/bin/repo
pip3 install -i https://repo.huaweicloud.com/repository/pypi/simple requests
注意:若出现
Failed to create the file /usr/local/bin/repo: 权限不够,则在命令行前加sudo。
注意:若出现
Command 'curl' not found, but can be installed with: sudo apt install curl,则执行命令sudo apt-get install curl安装curl插件。
-
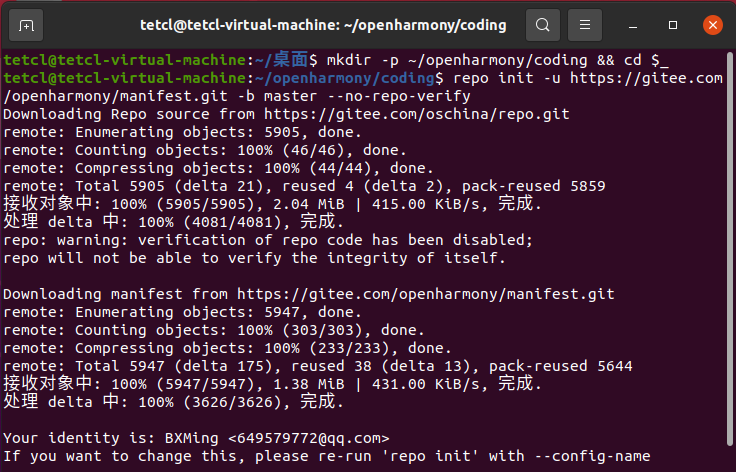
获取源码方式有两种,一种使用
repo+ssh方式,另一种repo+http方式,笔者使用的是第二种方式,不需要设置公钥。关于OpenHarmony源码可以获取主干代码也可以获取分支代码,前者为最新代码,笔者此处使用的是最新的代码。执行以下命令,获取OpenHarmony主干代码,如图4-11所示。
# 创建一个目录
mkdir -p ~/openharmony/coding && cd $_
repo init -u https://gitee.com/openharmony/manifest.git -b master --no-repo-verify
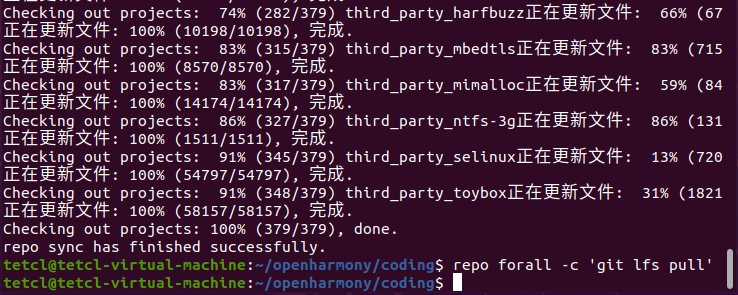
repo sync -c
repo forall -c 'git lfs pull'

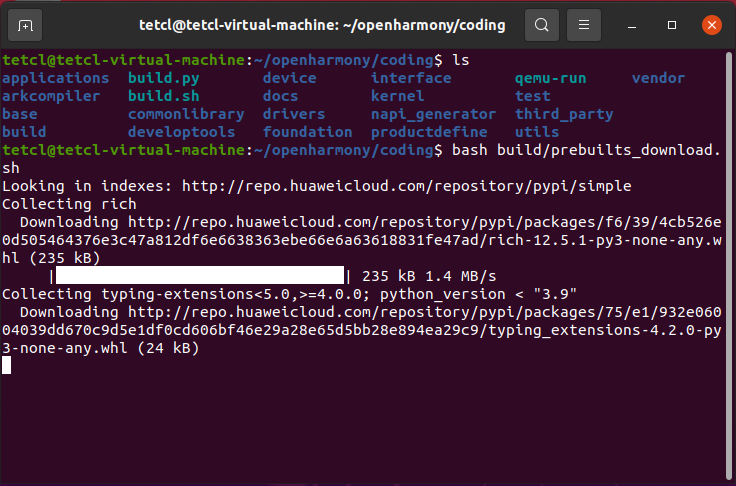
- 在源码根目录下执行prebuilts脚本,安装编译器及二进制工具,如图4-12所示。
bash build/prebuilts_download.sh
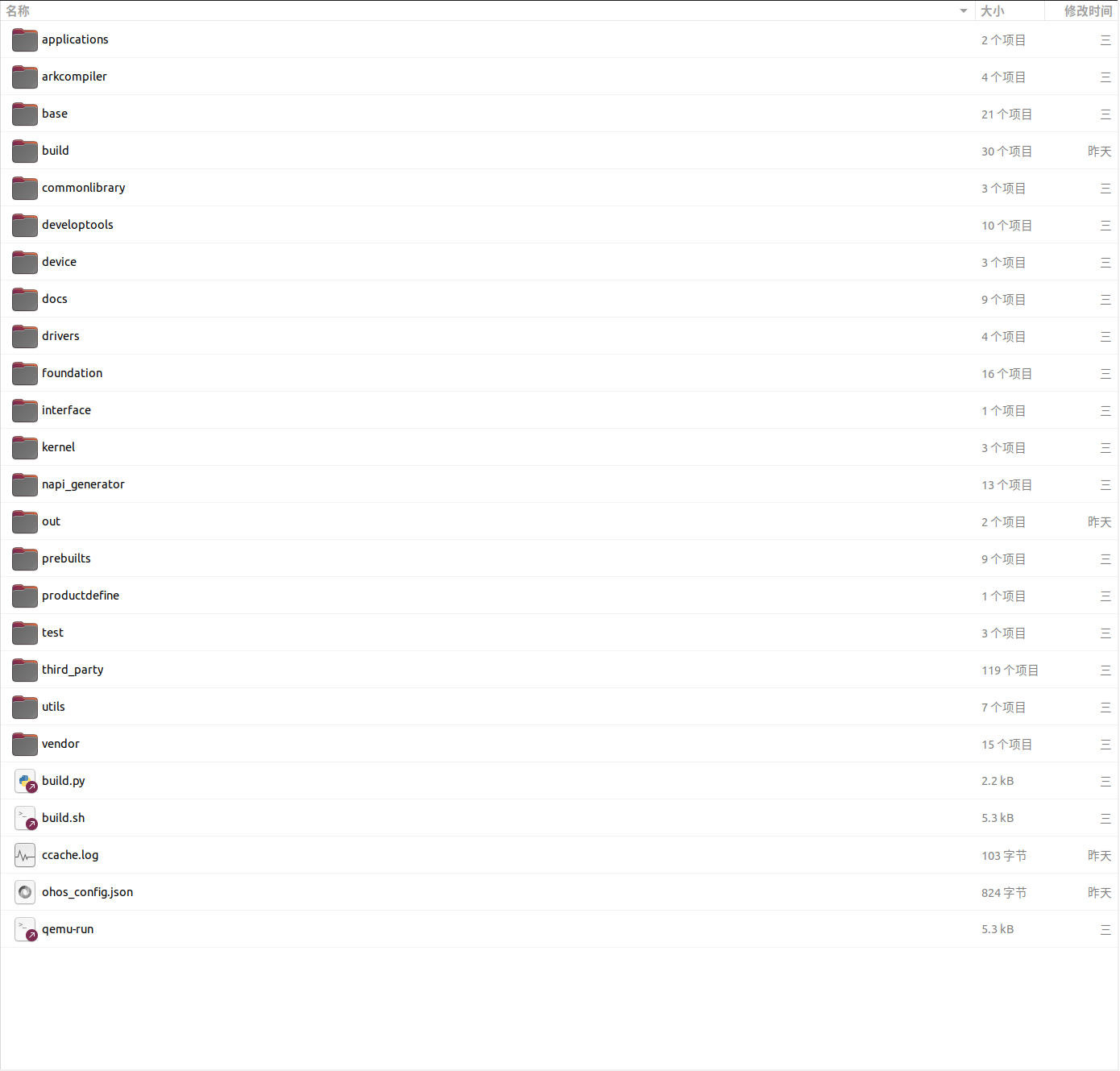
- 打开存储OpenHarmony源码的目录,源码各目录说明如表4-1所示,源码目录如图4-13所示。
| 目录名 | 描述 |
|---|---|
| applications | 应用程序样例,包括camera等 |
| base | 基础软件服务子系统集&硬件服务子系统集 |
| arkcompiler | 方舟编译器运行时组件系统,包括方舟运行时公共组件、JS转方舟字节码组件、方舟JS运行时组件及方舟工具链 |
| build | 组件化编译、构建和配置脚本 |
| commonlibrary | 提供公用基础库、C++功能函数和类、基础类库API |
| developtools | 调试工具模块,包含类Web范式语法编译转换、语法验证、语法报错,性能调优模块,系统能力编解码工具,资源编译工具等 |
| device | 开发板和芯片适配源码 |
| docs | 说明文档 |
| drivers | 驱动子系统 |
| foundation | 系统基础能力子系统集 |
| interface | JavaScript API公共仓,存放d.ts声明文件 |
| kernel | 内核子系统 |
| napi_generator | NAPI框架生成工具 |
| prebuilts | 编译器及工具链子系统 |
| productdefine | 产品配置 |
| test | 测试子系统 |
| third_party | 开源第三方组件 |
| utils | 常用的工具集 |
| vendor | 厂商提供的软件 |
| build.py | .sh |
| qemu-run | 运行QEMU模拟不同的硬件单板脚本文件 |
-
编译OpenHarmony源码
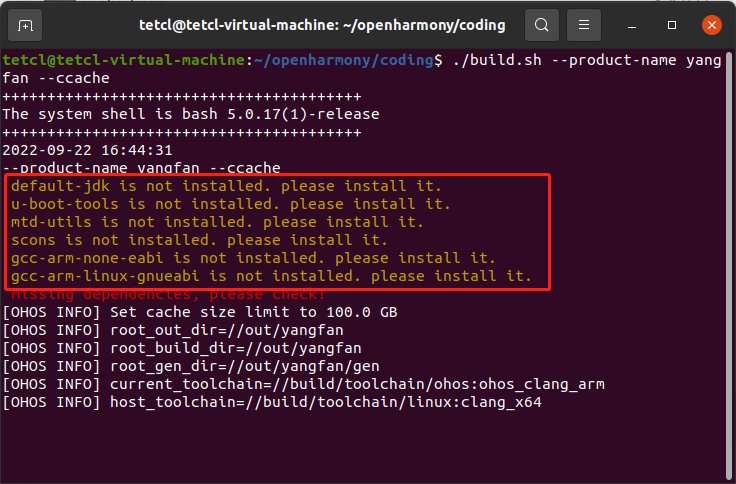
笔者这里使用的是终端命令方式编译,在源码根目录打开终端,输入以下命令进行源码编译,如图4-14所示。
./build.sh --product-name yangfan --ccache
注:由于没有下载部分依赖工具,因此编译时会出现一些问题。缺失依赖工具如图4-15所示,使用以下命令进行安装。
sudo apt-get install default-jdk u-boot-tools mtd-utils scons gcc-arm-none-eabi gcc-arm-linux-gnueabi
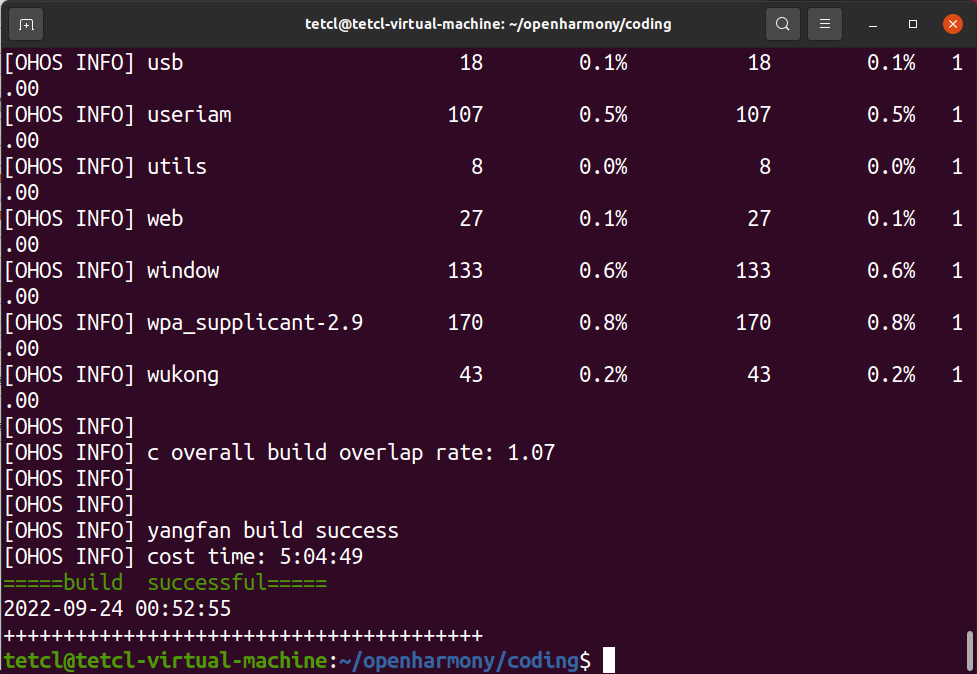
安装完依赖工具后,再次执行源码编译命令,等待编译完成,如图4-16所示,出现yangfan build success和build successful则表示编译成功。
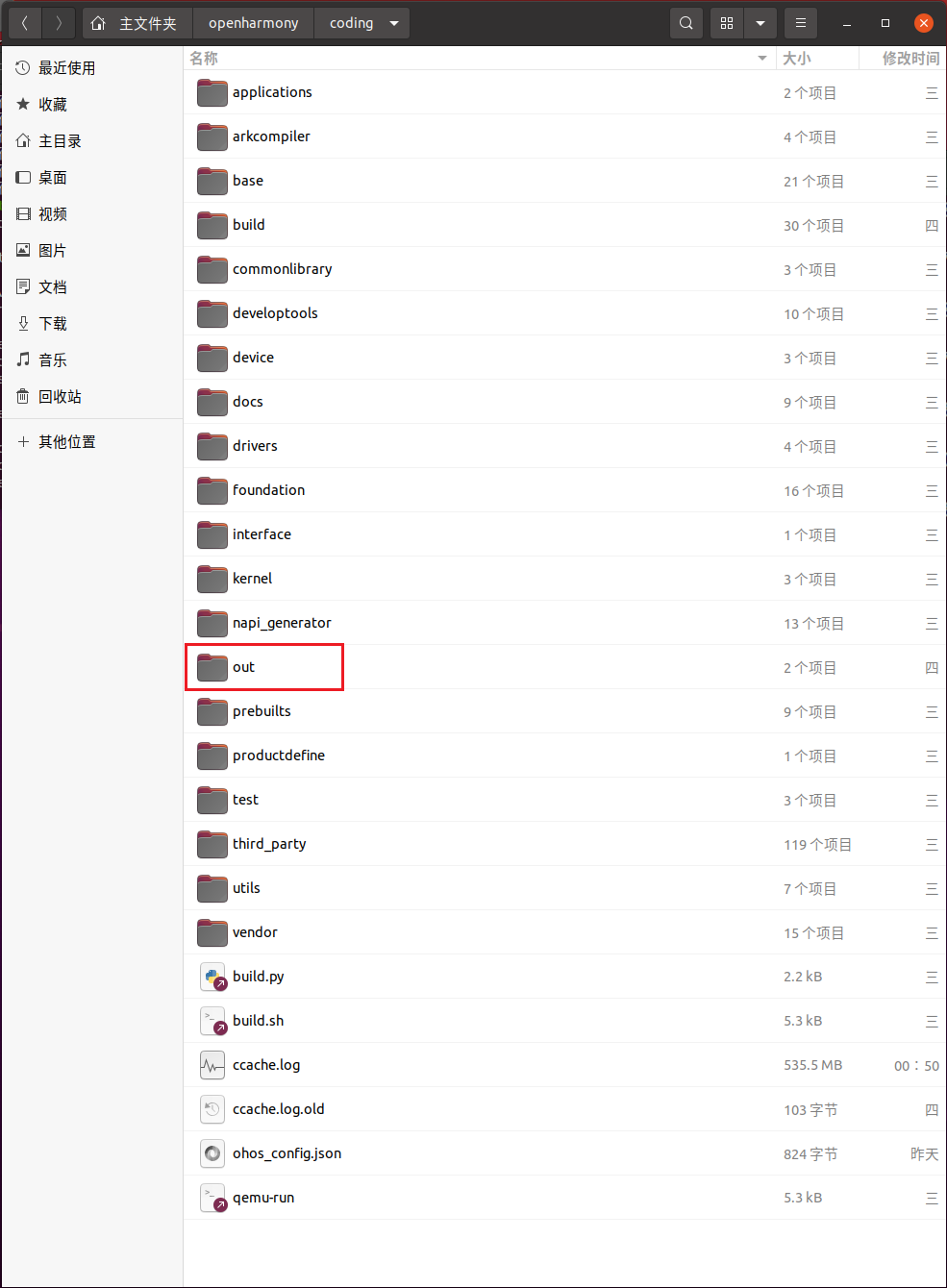
源码编译后的产物在源代码根目录下out目录中,如图4-17所示。
注:编译
yangfan源码适用于RK3399芯片,笔者手中的扬帆系列是“竞”开发板,是以RK3568芯片为主的,因此笔者选择重新编译源码使其适用于产品名称为rk3568,该源码典型应用是润和DAYU200开发板。
4.4 编译生成RK3568芯片镜像
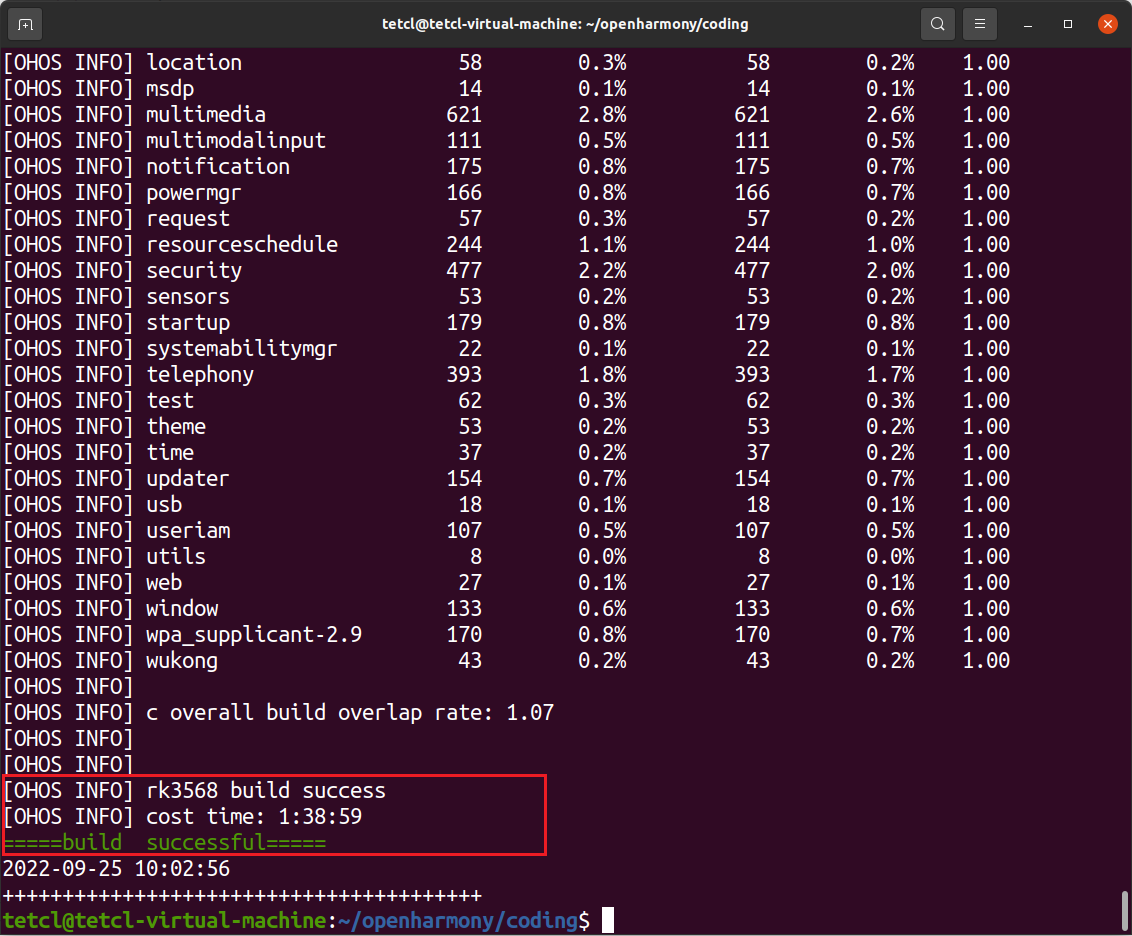
适用于“竞”开发板的源码还未合入OpenHarmony主仓,因此笔者选择编译生成RK3568芯片镜像,使用以下命令重新编译。
./build.sh --product-name rk3568 --ccache
使用命令方式第一次编译源码需要耗费一定的时间,等待编译完成,如图4-18所示。
参照【软通动力鸿湖万联扬帆系列“竞”开发板试用体验】认识"竞"文章第6小结使用瑞芯微将编译后的镜像烧录到“竞”开发板中,编译后的镜像位置源码根目录/out/rk3568/packages/phone/images/。烧录成功后,启动开发板会出现以下问题:
- 开机动画不是SwanLinkOS;
- DevEco Studio 无法识别设备;
- 开发板息屏导致设备重新启动;
- 界面布局错位。
5 小结
本节对OpenHarmony源码编译环境搭建、源码目录结构、针对性编译做了简单介绍,下章节将对源码进行魔改,以适配“竞”开发板。
-
软通动力
+关注
关注
1文章
756浏览量
15130 -
OpenHarmony
+关注
关注
25文章
3658浏览量
16129 -
鸿湖万联
+关注
关注
1文章
65浏览量
622
发布评论请先 登录
相关推荐
软通动力子公司鸿湖万联发布SwanLinkOS 5
软通动力子公司鸿湖万联重磅发布SwanLinkOS 5,擘画开源鸿蒙AI PC新篇章

软通动力旗下鸿湖万联荣获矿鸿OSV生态合作伙伴授牌
SwanLinkOS首批实现与HarmonyOS NEXT互联互通,软通动力子公司鸿湖万联助力鸿蒙生态统一互联

软通动力子公司鸿湖万联携多款重磅创新产品亮相华为开发者大会

软通动力携子公司鸿湖万联中标南方电网调峰调频发电有限公司数据采集装置研究开发项目

以不竭之动力 深耕人才沃土 | 软通动力及子公司鸿湖万联共推开源人才培养

共谱开源新篇章 软通动力子公司鸿湖万联与鸿蒙生态服务公司签署战略合作协议

软通动力子公司鸿湖万联多名讲师荣获首批“鸿蒙原生应用开发培训讲师”认证
软通动力子公司鸿湖万联战略签约鄂尔多斯工业互联网平台
精彩回顾·2023开放原子开发者大会 软通动力携子公司鸿湖万联助推开源生态破浪前行
软通动力子公司鸿湖万联亮相2023年开源产业生态大会





 工商网监
工商网监
评论