 怎样去使用CANalyzer搭建LIN通信网络呢
怎样去使用CANalyzer搭建LIN通信网络呢
1. 创建LIN工程
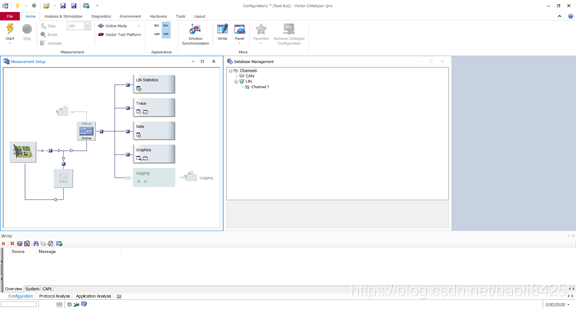
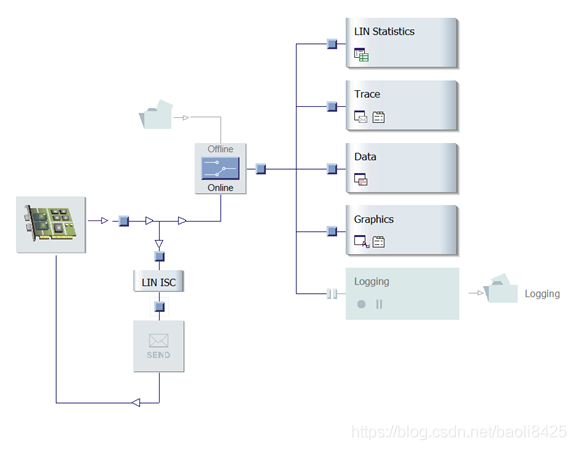
将Vector的盒子连接到电脑,打开CANalyzer,菜单栏选择File -> New,在Available Templates中双击LIN,跳出如下界面。
2. 配置LDF文件及LIN通信报文
2.1 配置报文及信号
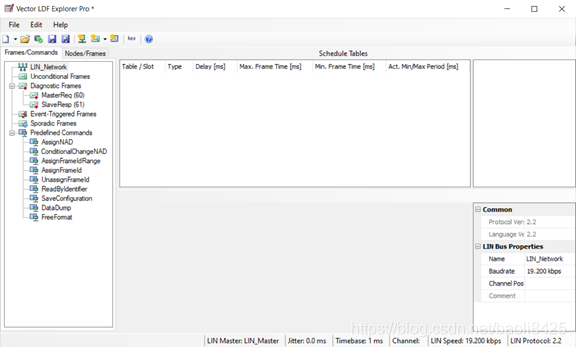
在菜单栏中选择Tools -> LDF Explorer,跳出如下界面,创建New File。
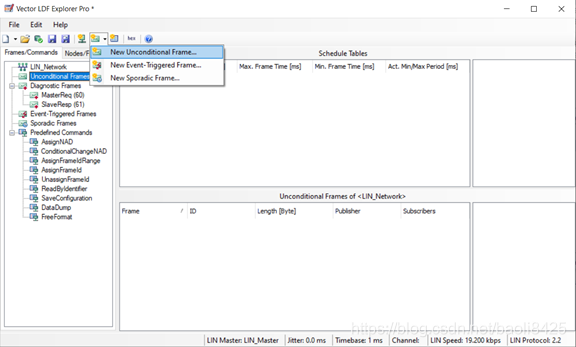
首先点击New Unconditional Frame添加新的无条件帧。
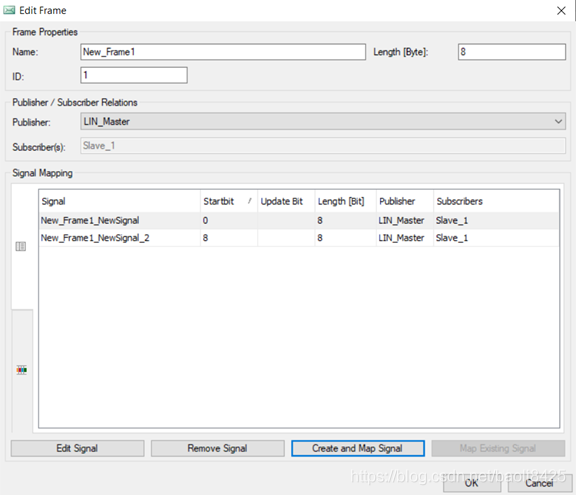
在如下界面中对LIN报文进行配置:
Name:帧名称; Length[Byte]:帧长度; ID:帧ID,以十进制表示; Publisher:帧的发送单元; Subscriber:帧的接收单元;
Signal Mapping:信号矩阵;
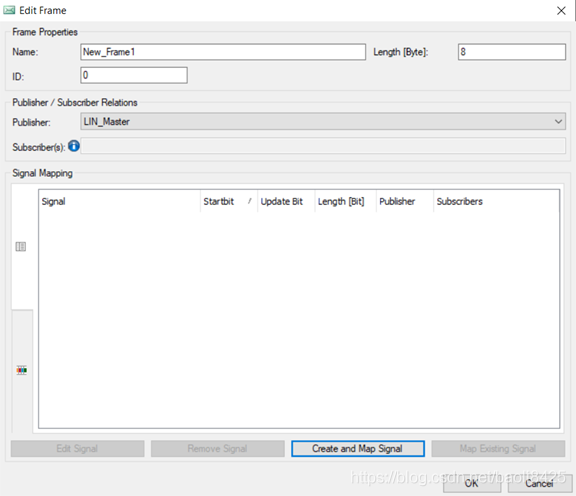
点击Create and Map Signal,创建信号矩阵及定义信号,跳出如下界面。
在Signal Properties选项卡内配置
Name:信号名称; Initial Value:初始值; Signal Type:信号类型,分为Scalar和Byte Array;
Length[Bit]:信号长度,最多8bit;
在Physical选项卡内配置
Minimum[raw]:最小物理量; Maximum[raw]:最大物理量; Unit:该物理量对应的单位; Factor:放大系数;
Offset:物理量的补偿;
在Publisher/Subscriber Relations选项卡内配置
ECUs:发送单元;
Subscriber(s):接收单元;
在Mapping选项卡内配置
Position on Frame[Bit]:该信号在报文中的起始位。

在报文中添加信号后如下图所示。
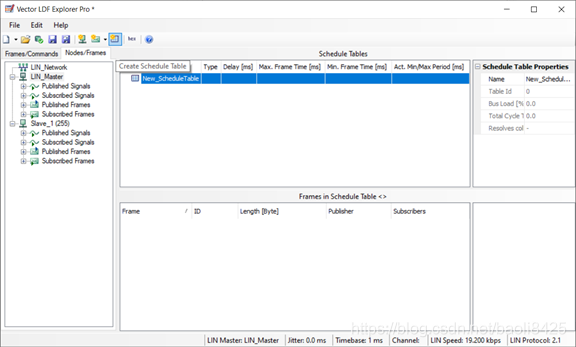
2.2 配置调度表
在菜单栏如下位置选择Create Schedule Table,添加帧的调度表。
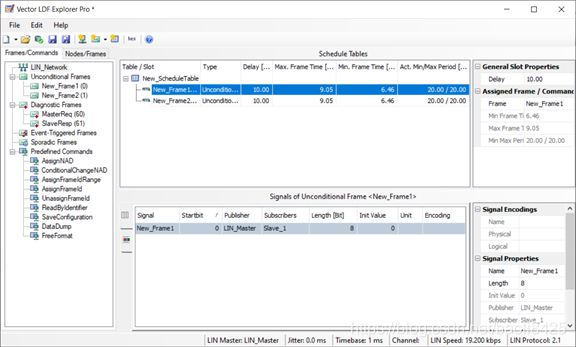
将Unconditional Frames中创建的无条件帧拖动到调度表中,并保存设置,如下图所示。
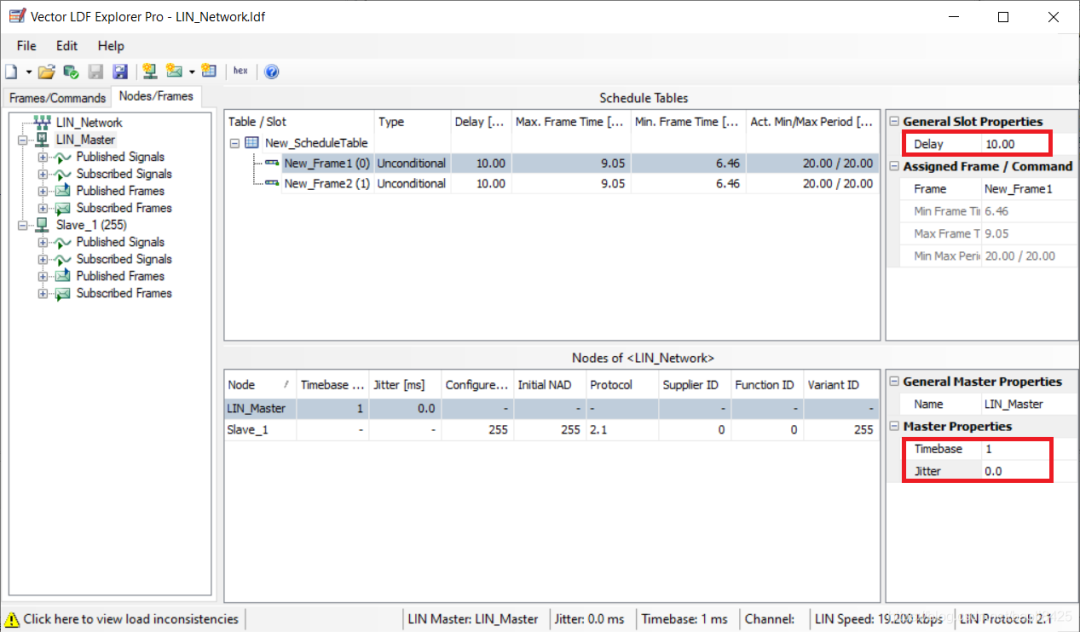
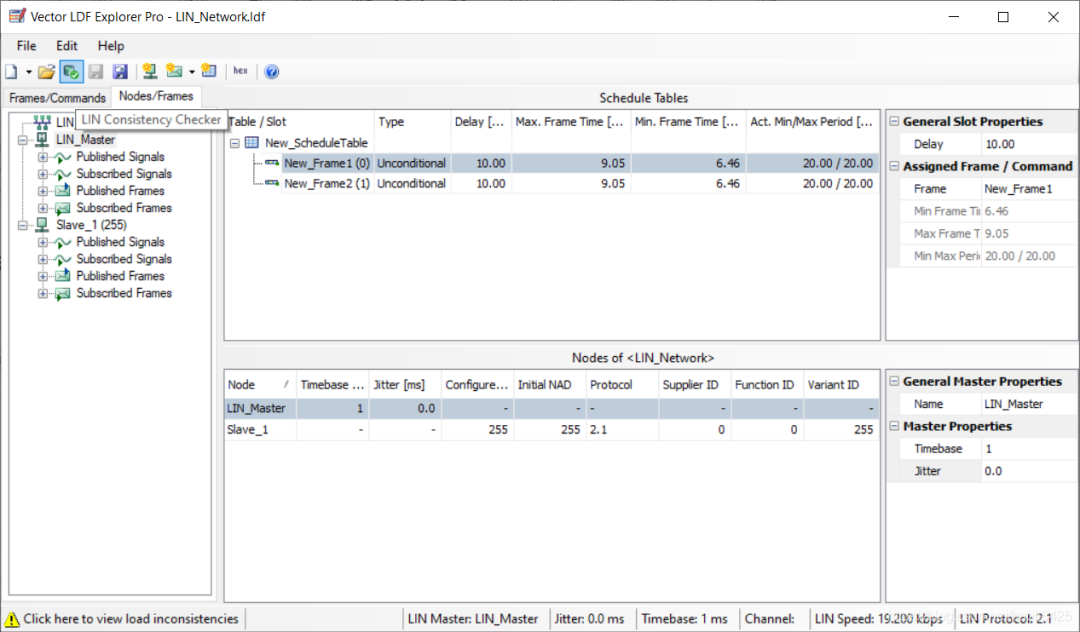
2.3 配置时序
选择Nodes/Frames,点击左侧方框中的主节点名称,这里是LIN_Master,并选择调度表中的报文。此时右侧方框如下图所示,根据客户需求分别修改Delay(时隙)、Timebase(基时)、Jitter(偏移)。
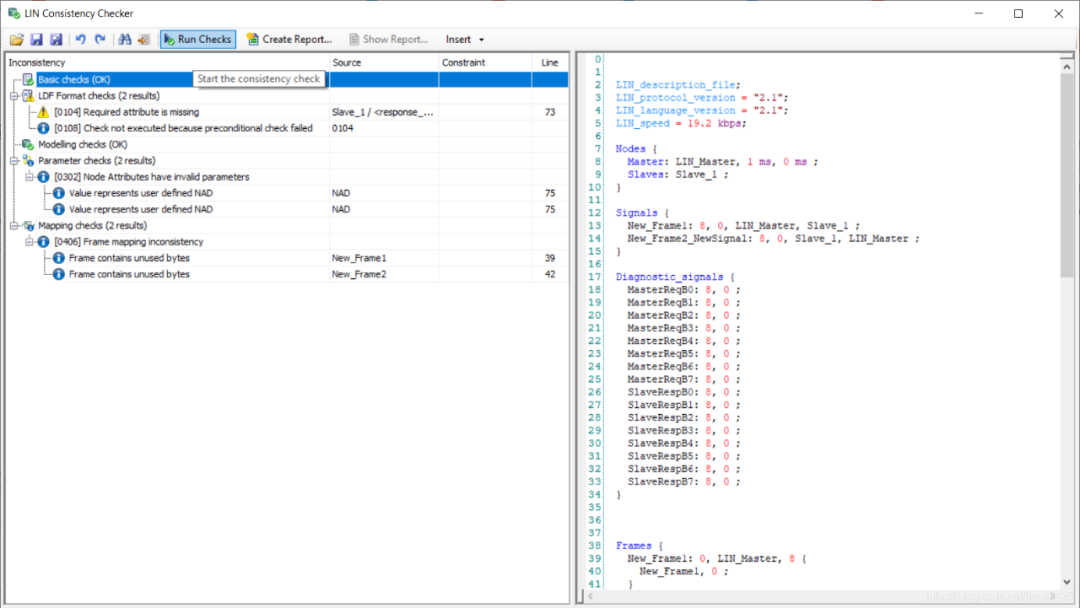
2.4 检查及保存配置
保存配置,然后在菜单栏如下位置点击LIN Consistency Checker,进入LDF文件的错误检查。
出现如下界面后,选择Start the consistency check开始检查。如果存在错误或者警告,左侧栏中会提示相应的问题。
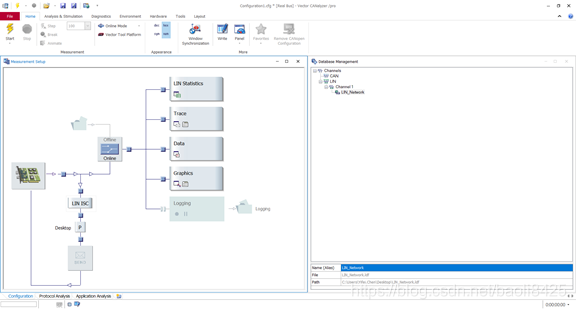
2.5 导入LDF文件
回到主界面,在右侧方框内,右击Channel 1,选择Add Database,将保存的LDF文件导入进来,如下图所示。
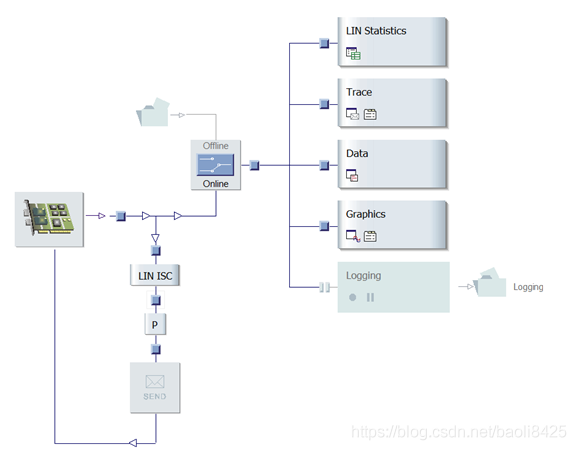
右击如下位置的蓝色小方块,选择如下Insert LIN Interactive Scheduler。
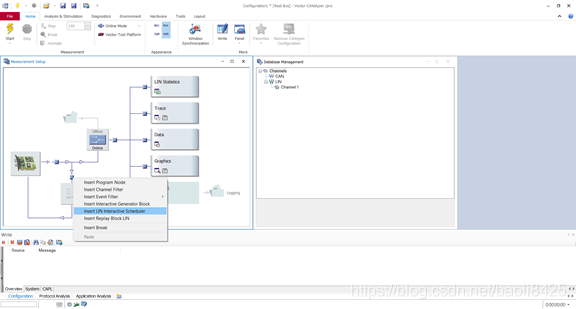
添加完之后,会出现一个灰色方块LIN ISC,界面如下图所示。
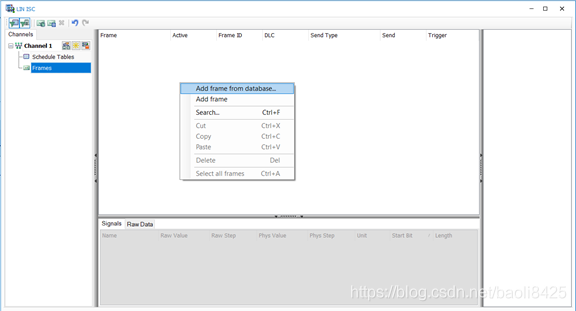
点击灰色方块LIN ISC,在跳出来的界面里面选择Frames,并在中间空白区域右击选择Add frame from database添加报文和调度表。
3. 添加和配置CAPL模块
在菜单栏中选择Tools -> CAPL Browser,跳出如下界面。
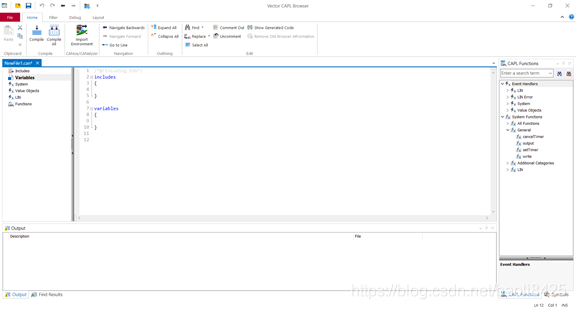
编写相关的CAPL代码,并保存。
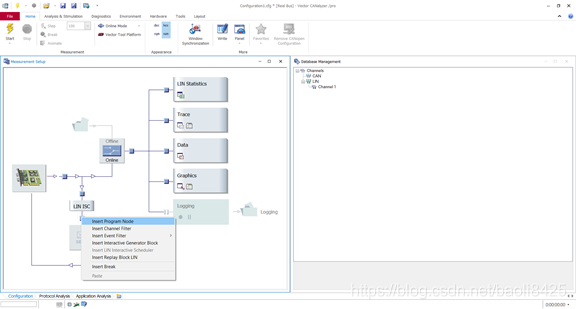
回到主界面,右击如下位置的蓝色小方块,选择如下Insert Program Node。
若跳出如下显示框,选择Yes。
添加完之后,会出现一个灰色方块P,界面如下图所示。
双击灰色方块P,选择相应的CAPL文件。
4. 运行工程
在Home菜单栏中点击黄色闪电图标Start,开始运行,如下图所示。
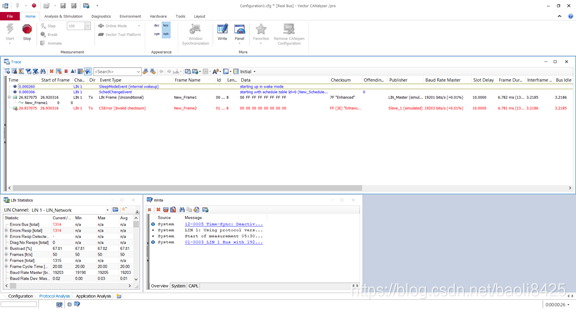
相关报文信息会显示在Trace界面上,若需要其他的显示监控界面,可在Analysis & Stimulation菜单栏中选择添加。
审核编辑:刘清
-
CAN
+关注
关注
57文章
2785浏览量
465062 -
ecu
+关注
关注
14文章
895浏览量
54983 -
LIN
+关注
关注
4文章
222浏览量
40523 -
通信网络
+关注
关注
21文章
2048浏览量
52373 -
CAPI
+关注
关注
0文章
5浏览量
12525
原文标题:使用CANalyzer搭建LIN通信网络
文章出处:【微信号:eng2mot,微信公众号:汽车ECU开发】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论