 CRC和Checksum信号的区别 Checksum信号在CAPL中实现的方法
CRC和Checksum信号的区别 Checksum信号在CAPL中实现的方法
CRC与Checksum区别
相信大家在CAN Msg或者ETH PDU中经常会看到Checksum这种信号。提到Checksum,就必须要说明一下CRC校验,很多工程师会概念混淆,认为两者是同一个东西,实则它们有很大的区别。
01两者存放位置不同
CRC校验:循环冗余检查(CRC)是一种数据传输检错功能,对数据进行多项式计算,并将得到的结果附在帧的后面,接收设备也执行类似的算法,以保证数据传输的正确性和完整性。
通过CRC概念可以得知,CRC存放在CRC场,而Checksum存放在数据场之中,一般在数据场的第一个字节或者最后一个字节。

图1 标准数据帧格式
02两者应用场景不同
在CAN报文帧中,CRC校验是发送器根据发送的bit进行多项式计算校验,结果放在15bit长度的CRC位。接收器也是用相同的多项式计算总线上的数据,与接收到的校验值进行比较,相同则表示帧正确接收,并在ACK时隙中发送显性状态,覆盖发送器的隐性位;如果不同接收节点在ACK界定符之后发送错误帧。
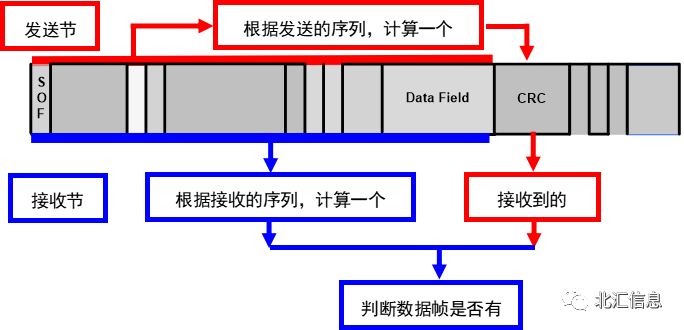
图2 CRC校验原理
CRC校验是为了保证数据从一个CAN收发器发送到另外一个收发器的信号完整性,而数据场中Checksum校验算法是为了校验数据被正确的打包与解包,并且Checksum算法是可以自行制定的,计算规则的灵活度高。
Checksum的应用场景
对于Checksum而言,它的应用场景有以下三点:
01确保数据正确打包
有些ECU内部的变量在传递到CAN收发器之前就有可能发生错误,这种类型的错误CAN收发器是无法检测到的。报文中的信号和Checksum校验是在应用层完成的,将报文中的各个字节进行校验,报文和Checksum一起发送,并且在接收节点进行解析,从而确保数据链路完整和数据正确打包。
02实现数据加密
CAN网络是开放性的,CAN节点可以随时加入到总线当中,为了保证通信的安全性,ECU传输的关键控制信号需要进行加密,报文的发送方和接收方使用相同的Checksum算法作为数据加密的密钥。接收方对比秘钥,如果不同,此条报文的数据不被使用,从而避免被其他节点的数据影响。Checksum算法不在DBC等数据库文件中说明,可以单独保密,从而确保了数据的加密。
03提高数据的可信度
一帧报文在多个字节中可能出现位错误,一般情况下CRC8校验的错误率为1/256,crc16校验的错误率为1/65536,crc32校验的错误率为1/(65536*65536)。通过Checksum校验可以提高数据的可信度。
由于Checksum的作用,其也常应用在车载以太网当中。
在CAPL中Checksum信号实现
通常情况下,Checksum和LiveCounter信号是成对出现的。在CANoe中使用仿真节点与真实控制器交互,需要将LiveCounter和Checksum信号仿真,这样才能成功通信。LiveCounter长度为4bit,它是用于报文发送计数的生命信号,每发送一帧报文后就对该LiveCounter位加1,会在0~15之间循环增加。在报文其他信号没有改变时,LiveCounter实时更新使得Checksum信号跟着更新,提高校验的准确性。那么LiveCounter信号该如何仿真呢?下面以CAN总线DBC为例,介绍在CAPL中实现LiveCounter和Checksum校验仿真。
CAPL是CANoe和CANalyzer中可用的类C的编程语言。CAPL中程序块的执行由事件控制,在专用的编译器中开发和编译,这样可以访问数据库中的所有对象以及系统变量,被汽车电子工程师们广泛使用。
下图为LiveCounter计算的代码,为了保证数据的准确性,进行一次Checksum计算,这样就可以实现LiveCounter信号的仿真。
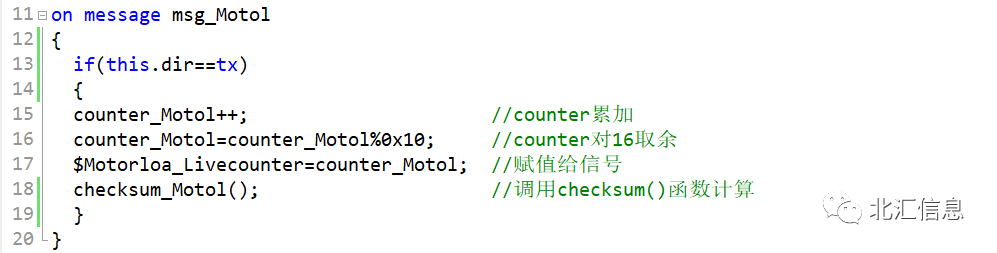
图3 LiveCounter计算代码
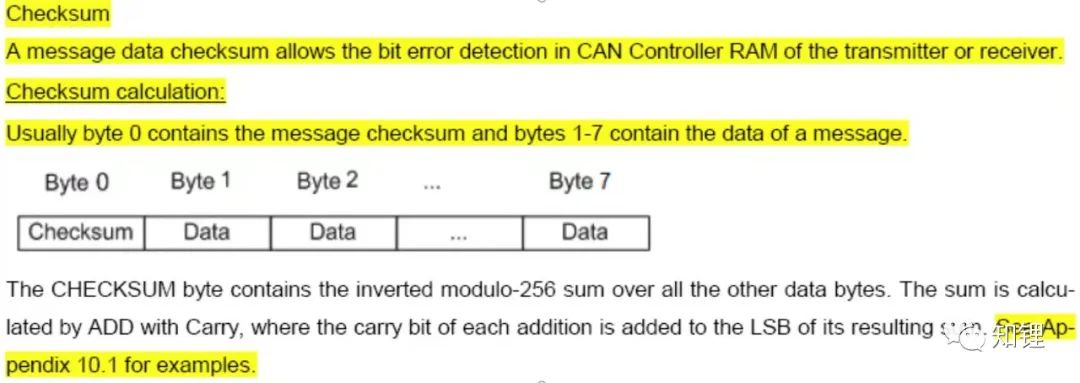
下图为示例报文中各个信号位置排布关系,在此报文中,Checksum校验方式为前七个字节异或运算,将运算结果存放到最后一个字节。排布图中共有8个信号,它们的格式为Motorola格式,也就是俗称的大端模式。
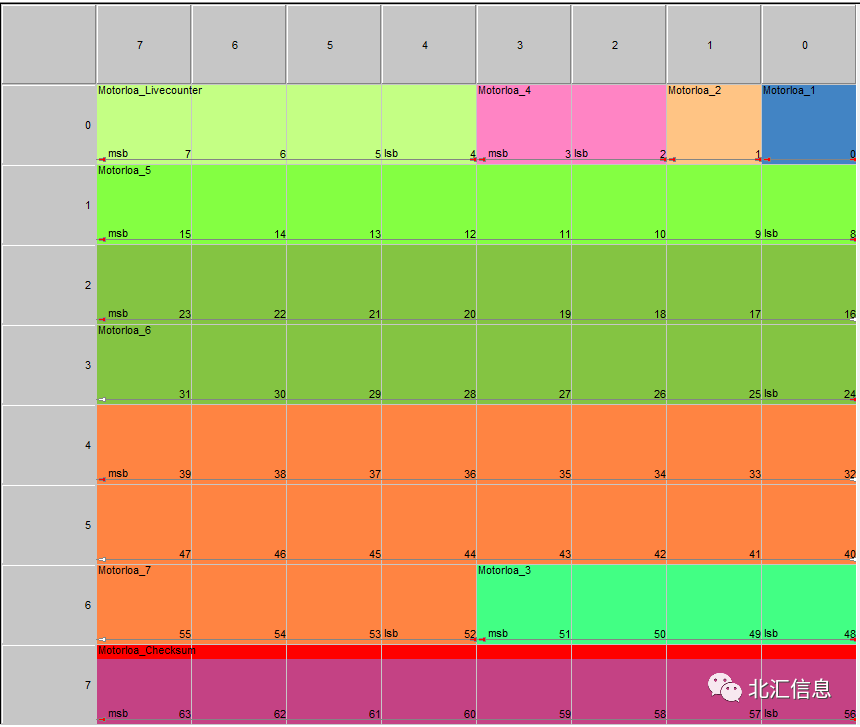
图4 报文中信号排布
CAPL只能访问到报文中的信号,无法访问到报文中的每个字节,要进行Checksum计算,需要根据信号排布把前七个字节的真实值重新组合存放在一个byte类型的数组当中,然后对这个数组异或运算获取的结果为该报文中Checksum信号值。
对于不同长度的信号,需要声明不同类型的数组来存放不同的信号。byte类型长度为1字节,声明两个byte *[8]类型的数组(*为省略的数组名称)分别存放长度小于一字节的信号和重组后每个字节的真实值;int类型长度为2字节,声明int *[8]类型的数组存放长度为1-2字节的信号;long类型长度为4字节,声明long *[8]类型的数组存放长度为2-4字节的信号。下图为Checksum中信号长度小于1字节的字节重组示例代码。
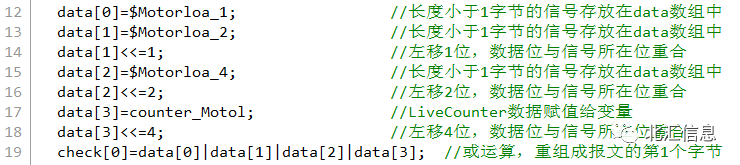
图5 Checksum字节重组示例代码
另外,参与Checksum计算的是信号的真实值而不是物理值,如果信号中有偏移量和比例因子,在赋值时需要将信号加上偏移量,并除以比例因子以获得真实值。
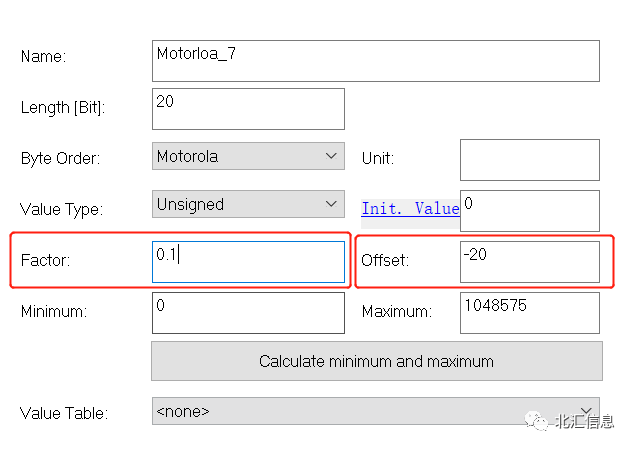
图6 信号描述
为了保证和真实控制器通信正常,Checksum数据必须准确,Checksum计算步骤一般写成无返回值函数(void),在LiveCounter信号改变或者其他信号改变时调用计算。
正确计算的LiveCounter和Checksum信号曲线如下图所示。
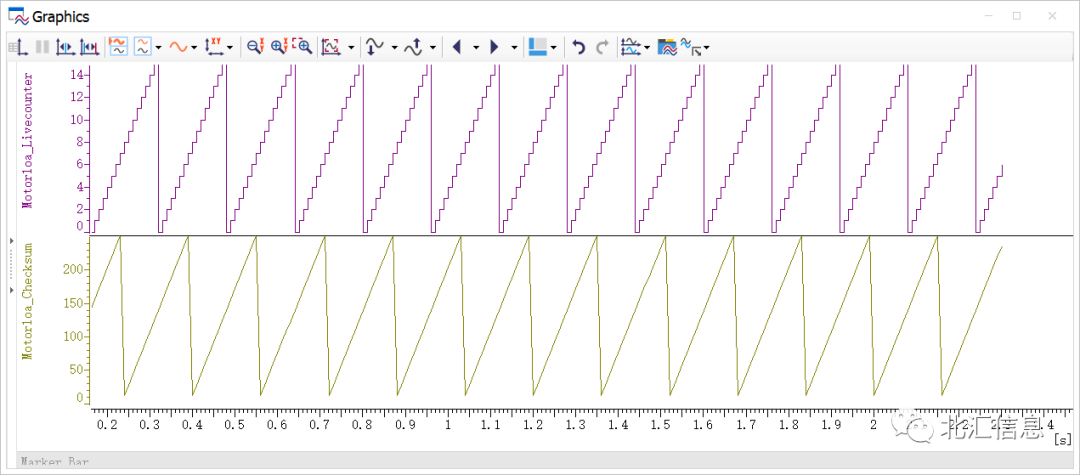
图7 LiveCounter和Checksum信号曲线
总结
本文重点描述了CRC和Checksum信号的区别以及Checksum信号在CAPL中实现的方法。CAPL编程作为CANoe的灵魂,使CANoe满足仿真、分析、测试和诊断的各种复杂的要求,同时使CANoe的功能得以不断扩展。
北汇信息作为Vector中国的合作伙伴,致力于为中国汽车客户提供优质的工具支持、解决方案以及测试服务。
注:图片来自于Vector。
审核编辑:汤梓红
-
CAN
+关注
关注
57文章
2756浏览量
463885 -
crc
+关注
关注
0文章
199浏览量
29483 -
信号
+关注
关注
11文章
2794浏览量
76865
原文标题:CAPL编程的进阶应用 | Checksum算法的实现
文章出处:【微信号:QCDZSJ,微信公众号:汽车电子设计】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
在IAR Embedded Workbench中计算多个地址区间的Checksum
求助,关于PSOC4模拟EEPROM的checksum问题求解

如何在IAR中配置CRC参数
请问如何在IAR中配置CRC参数?
TMS320LF2403A下载时提示的Checksum计算方法?
M451芯片FMC读写flash中,如何使用checksum功能?
新功能发布 | TSMaster如何实现checksum和rolling counter的本地化支持

CAPL编程的进阶应用 | Checksum算法的实现







 工商网监
工商网监
评论