 基于Φ-OTDR的水下缆在线状态监测及周边环境感知
基于Φ-OTDR的水下缆在线状态监测及周边环境感知
作者:南京大学 博士生陈晓红 & 张旭苹教授 & 张益昕副教授
01 导读
随着国内外电信网络规模的扩展以及海岛经济的迅速发展,水下缆数量急剧增加。水下缆所处环境复杂且恶劣,常受到人为破坏、船只抛锚、生物啃噬等因素的影响,导致水下缆传输系统出现故障并通信中断的现象频发。因此实时监测水下缆的运行状态并及时预警其周边环境潜在威胁十分重要。南京大学智能光感知与调控技术教育部重点实验室联合南京邮电大学、南京大学深圳研究院、内蒙古电力勘测设计院有限责任公司近年来开展了一系列针对水下缆状态监测的研究,并于近期提出了一种基于锁相相位敏感型光时域反射仪(Phase Sensitive Optical Time Domain Reflectometry,Φ-OTDR)的既有水下缆在线状态监测及周边环境感知方案。分别在天然淡水湖和东海进行了水流冲击、船锚拖拽和潮汐监测实验。并利用埋设在长江滩涂的水下缆开展了人员运动轨迹和船只流量监测实验。现场实验证明,所提出的锁相Φ-OTDR系统能够对既有水下通信光缆进行实时状态监测和周边知环境感知,为缆的状态监测和故障预警提供了有效的技术手段。
02 研究背景
随着国内外电信网络规模的扩展以及海岛经济的迅速发展,水下缆数量急剧增加。据TeleGeography最新版“全球海缆地图2022”显示,目前世界上投入运营的、在建的海缆总长度已超过140万公里。然而,由于水下缆通常敷设在环境极其恶劣的海底或湖底等,其在运行过程中除了受到潮汐、洋流、地震、鱼类撕咬,以及性能老化等自然因素的影响外,还会受到捕鱼作业和船只抛锚等人为因素的外力破坏,这使得水下缆传输系统出现故障并导致通信中断的现象频发。据统计,其中人为因素造成的水下缆故障约占95%。因水下缆所处环境恶劣,其维修过程相当复杂,需要花费大量的人力物力,一旦发生故障将会造成严重的经济损失。因此实时监测水下缆的运行状态并及时预警其周边环境潜在威胁具有重要的研究意义。
水下缆的传统监测方法有光时域反射仪(Optical Time Domain Reflectometry, OTDR)、相干光时域反射仪(Coherent OTDR, COTDR)、拉曼光时域反射仪(Raman OTDR, ROTDR)、布里渊光时域反射仪(Brillouin OTDR, BOTDR)等。然而对于水下缆的运行状态,当水下缆外部环境变化引起水下缆产生损耗或缆线内部温度/应力变化时,往往已经对缆造成了一定的损伤。因此属于静态监测的上述技术,只能在水下缆损伤或故障发生后才能起到监测和告警作用,无法对缆周边潜在的威胁进行提前感知及预报。与上述技术相比,Φ-OTDR具有响应速度快和灵敏度高的优点,是现阶段水下缆状态动态监测及故障预警的研究热点。但对于传统的外差相干探测Φ-OTDR系统,因其载波信号、外部调制脉冲信号和数据采集卡(Data Acquistion, DAQ)触发信号来自独立的时钟源,每个光脉冲具有随机的初始相位偏置,因此在传统的相干探测Φ-OTDR系统中获得的每条瑞利背向散射曲线也具有不同的随时间变化的初始相位偏置,从而导致调制过程中引入不确定的干扰噪声项。这种非锁相带来的相位偏置在监测过程中将会引入残余干扰频率,从而影响鉴相精度。这种因非锁相带来的残余频率影响是不可忽略的,必须加以抑制。否则,水下缆监测的目标信号可能会与该残余频率落入同一频段,使得后续对水下缆预警事件的模式识别变得非常困难。
为了解决上述问题,本文提出了一种基于锁相(Phase-Locked, PL)结构的新型外差探测Φ-OTDR系统。该系统能够提供时钟同步的载波信号、调制信号和DAQ触发信号,从而为振动信号重构提供更高的精度。并利用新系统分别在天然淡水湖和东海进行了水流冲击、船锚拖拽和潮汐监测实验,研究了外部振动对既有水下缆的直接作用影响。并利用埋设在长江滩涂的水下缆开展了人员运动轨迹和船只流量监测实验,研究了外部环境对缆线的间接作用影响。
图1 课题组与合作单位在野外开展的实验现场图
03 创新研究
3.1 锁相外差探测Φ-OTDR系统
在传统相干探测Φ-OTDR系统中,由于载波信号、外部调制脉冲信号和DAQ触发信号来自独立的振荡源,每个光脉冲具有随机的初始相位偏置,因此每个中频信号轨迹也具有随时间变化的不同的初始相位偏置。初始相位偏置连续变化,使得由探测器获得的几个连续中频曲线之间的相关性随时间降低。这种由非锁相引起的相位偏置在后续的数据处理I/Q解调中将会带来额外的残余频率,这将降低Φ-OTDR的解调精度和(Noise Equivalent Power,NEP)水平。
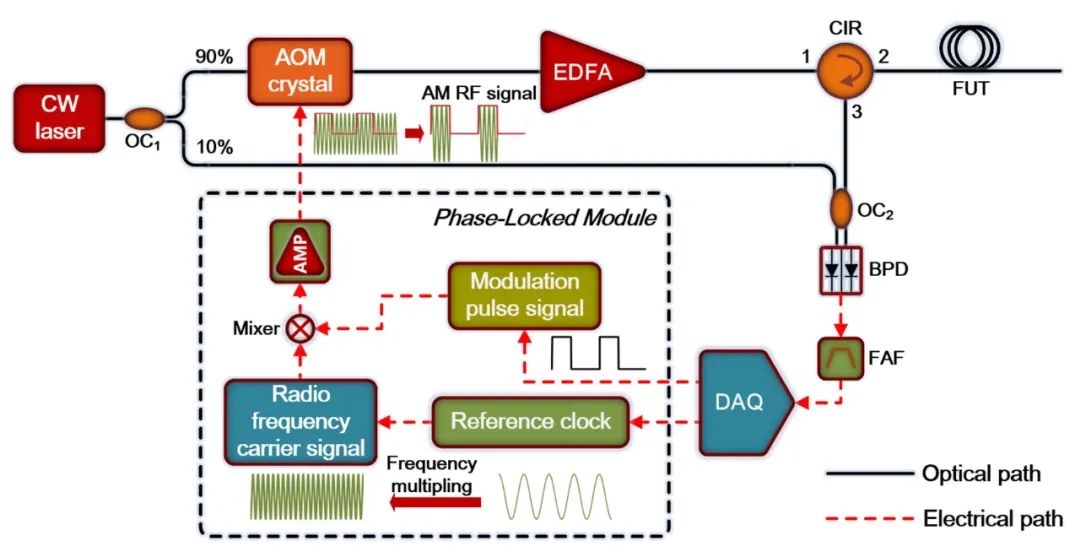
图2 基于新设计PL结构的外差探测Φ-OTDR系统图
为了抑制非锁相带来的干扰噪声,本文提出了一种基于锁相结构的Φ-OTDR系统,如图2所示。在该锁相结构中,为了确保系统时钟的同源性,由DAQ内部产生并同步输出一个正弦基准时钟信号和一个调制脉冲信号,以确保所设计的Φ-OTDR系统时钟完全同步。然后将该基准载波信号的频率通过倍频器倍频至所需移频量的RF载波信号,再与调制脉冲信号通过混频器实现斩波。斩波后获得的幅度调制RF信号通过放大器进行功率放大后用以驱动AOM晶体。从而实现AOM载波信号、调制脉冲信号以及DAQ触发信号的时钟同源,确保所获得的中频信号初始相位不发生偏置,以抑制因非锁相带来的干扰噪声。
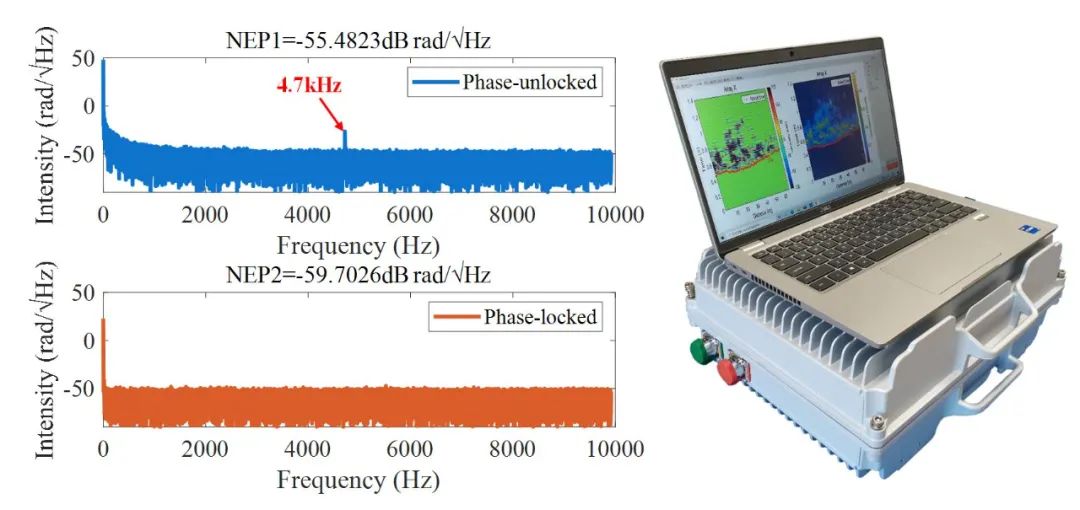
图3 传统的和新设计的Φ-OTDR系统获得的本底噪声数据分析结果
为了便于验证所设计系统的锁相性能,以及考虑到后期进行外场实验验证的便捷性,我们与南京法艾博光电科技有限公司合作,对新设计的锁相Φ-OTDR系统进行了仪器化。并与同配置传统Φ-OTDR系统进行了本底噪声性能测试,二者获得的噪声数据功率谱密度(Power Spectral Density,PSD)结果如图3所示。可以看到,传统的Φ-OTDR采集的安静环境下的噪声数据带来了4.7kHz的高频残余信号,而新设计的PL Φ-OTDR获得的噪声数据PSD非常干净,与前者相比,NEP降低了4.2dB。并且,在1kHz以下的低频部分有更加明显的改进,进一步验证了本文新设计的锁相Φ-OTDR系统具有卓越的抑制非锁相噪声性能。
为了验证新仪器实现既有水下缆在线状态监测和周围环境感知的能力,本文对不同场景下新仪器直接和间接作用于缆的外部振动监测进行了研究。通过铺设在湖底、海床和河床下的通用型GYXTS单模双核铠装水下通信光缆,分别在淡水湖、东海和长江进行了现场实验。
3.2 基于既有水下缆的在线状态监测
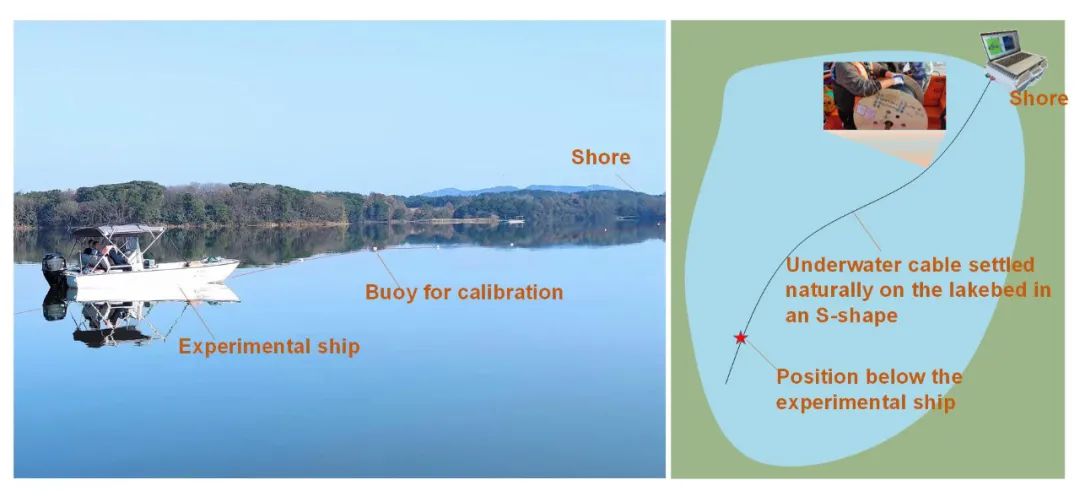
图4 淡水湖现场布设图(水流冲击和船锚拖拽实验)
3.2.1 水流冲击监测
实验中,实验人员驾驶实验船使其停留在距离光缆起点约295米处缆的上方,然后将模拟水流冲击用的水泵置于水中约7m深处,再固定在船上,打开水泵进行水流冲击实验,监测结果如图5所示。当水流冲击产生的振动传播到缆时,重构信号的时空功率分布瀑布图呈现出明显的亮条纹,如图5(a)中的黄色矩形框中所示。振动中心位置为295m,覆盖范围约±40m。中心位置的时域波形如图5(b)所示,可以观察到60s内有11个连续的冲击信号。在10m空间分辨率条件下,连续水流冲击引起的光缆动态轴向应变达到±2.5με,超过了传统BOTDR或BOTDA仪器所能测量的静态应变下限。此外,与直接施加在裸纤上的振动事件相比,由于光缆内部对光纤的保护,因此测得的动态应变相对较小。第6次振荡波形的局部放大如图5(d)绿框中所示,单次撞击后,阻尼振荡持续约1.6s。图5 (c)为图5(b)的功率谱,红框中为第6个冲击信号的频谱细节图。结果表明,每个冲击信号起初均是宽频带的,随后频谱范围迅速缩小为若干低频,与水流冲击信号的频率特征相一致。对该信号以0.027s为间隔进行频谱能量统计,获得各频率能量随时间的分布如图6所示。可以看到,冲击信号从30.85s开始,在0.23s内能量迅速衰减至10%以下,然后形成多次振荡直至消散。图6(b)展示了≥1 kHz和≥2.5 kHz的高频能量分布,高于2.5 kHz的频率只维持了约0.07s,然后迅速衰减至10%以下。
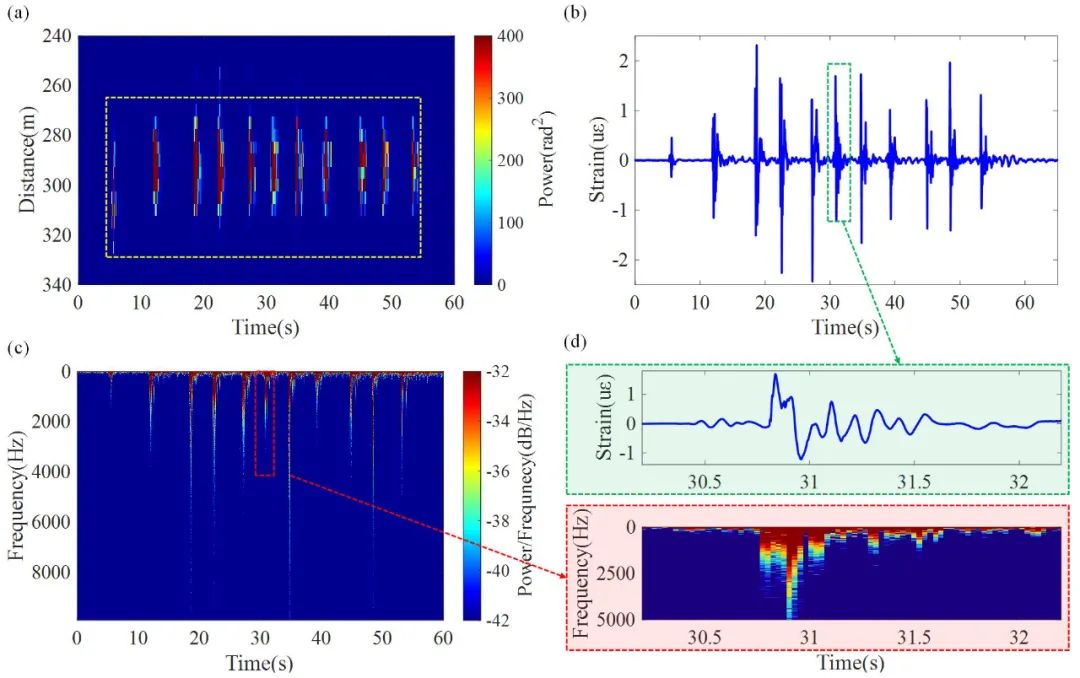
图5 水流冲击监测结果。(a) 重构信号的时空功率分布瀑布图;(b) 295m处的时域波形;(c) 295m处重构信号的PSD图;(d) 应变量和频谱随时间变化的子图
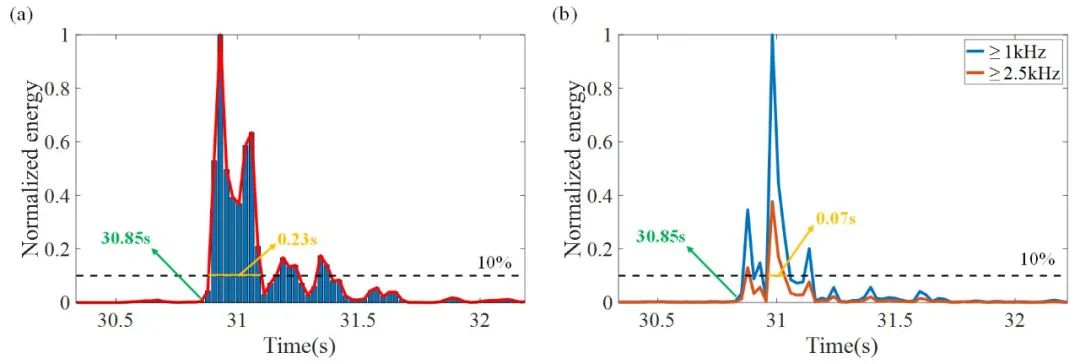
图6 第6个振荡信号的归一化能量统计结果。(a) 所有频率;(b) 高频分量
3.2.2 船锚拖拽监测
实验中,实验人员将模拟船锚用100kg铅鱼放入距光缆起点约240米处的水中,让其沉到淡水湖湖底,然后在与缆垂直方向上拖拽锚。如图7所示,缆线在被锚拖拽时会产生机械振动。图7(a)中可以看到在240m附近发生了拖拽,整个拖拽过程持续了约3分钟。随着拖拽力的增大,缆的受力范围逐渐增大至±100m。在单次拖动过程中,从拖拽点到两侧的时空二维图上呈现出对称的V型,这与缆上某一点被拖动时受力区域逐渐扩大的过程一致。240m处的时域波形如图7(b)所示,图7(d)绿框中为68s~73s的单次拖拽波形。与水流冲击相比,锚拖拽产生的波形无阻尼振荡特性,在相同空间分辨率10m时达到±29με,动态应变高出1个数量级。图7(c)为对应的功率谱图,与水流冲击结果相比,锚拖拽信号的功率谱强度要大得多,并且每个拖动信号在开始时是宽频带的,不同之处是锚拖拽产生的宽频持续了约1.19s,然后频谱范围缓慢缩小为低频分量。以0.027s为间隔的频谱能量统计结果如图8所示。与冲击信号不同,由于拖拽是一个“拉”到“松”的过程,因此单次拖拽产生的能量在0.34s后迅速下降到10%以下,然后立即上升。0.46s后,再次衰减到10%以下,然后在10%保持一段时间后消散。可见,虽然湖床上自然下沉的水下缆处于自由状态,并受到水流的影响,但使用本文最新的Φ-OTDR仪器仍然可以区分直接作用在缆上的水流冲击和船锚破坏事件。
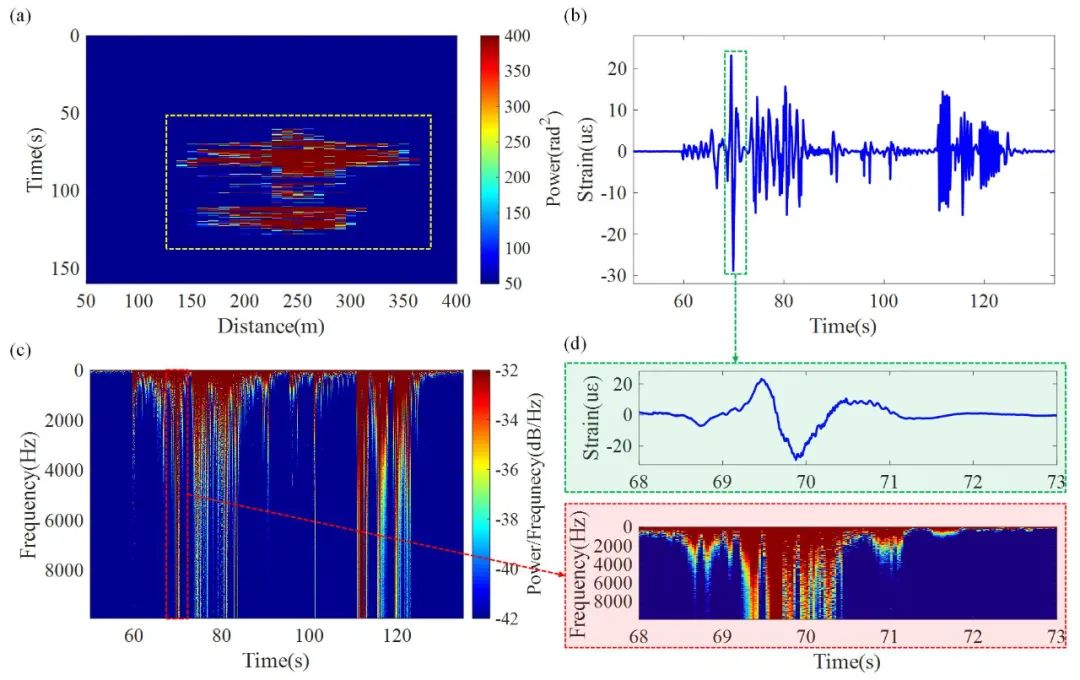
图7 锚害实验监测结果。(a) 重构信号的时空功率分布瀑布图;(b) 240m处的时域波形;(c)240m处重构信号的PSD图;(d) 应变量和频谱随时间变化的子图
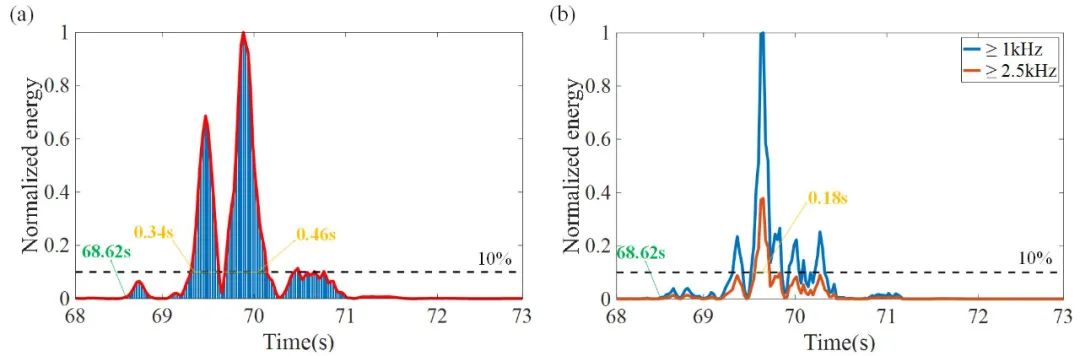
图8 单次拖拽的归一化能量统计结果。(a) 所有频率;(b) 高频分量
3.2.3 潮汐监测
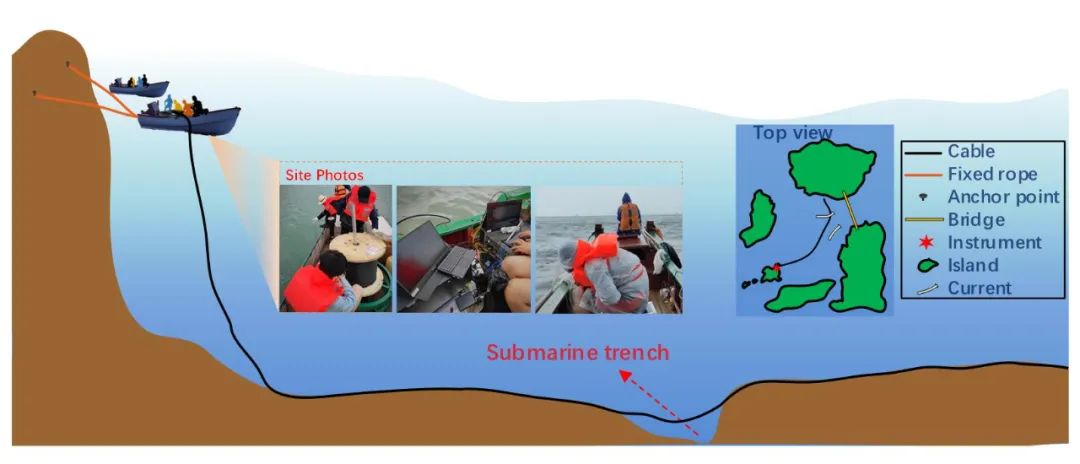
图9 东海实验现场布设图(潮汐监测实验)
受复杂水下环境和洋流运动的影响,原本埋在海底的部分缆段可能会暴露在海水中。缆线会被潮汐或洋流反复冲刷,然后面临磨损或损坏的危险。如果能够提前了解海水对缆的直接作用所造成的振动强度数据库,并形成长期观测的水文数据,可能为今后预防类地震灾害提供参考价值。图10为课题组在东海某港口观测到的潮汐振动,共计44分钟。右侧局部放大图更清晰地显示了振动信号明暗变化的规律。在22分钟后,随着缆线被人为收紧,拖动区域逐渐扩大,这与缆线从松弛到拉紧的过程相对应。并且在1000~2000m区间内长期存在较大范围的高强度振动,推测是由于涨潮时海流的冲击造成的。在1450~1850m区域,可以看到涨潮引起的扰动范围随着时间逐渐扩大。从监测结果可以观察到各位置的涨潮时刻,如图10中的红色方块箭头所示。
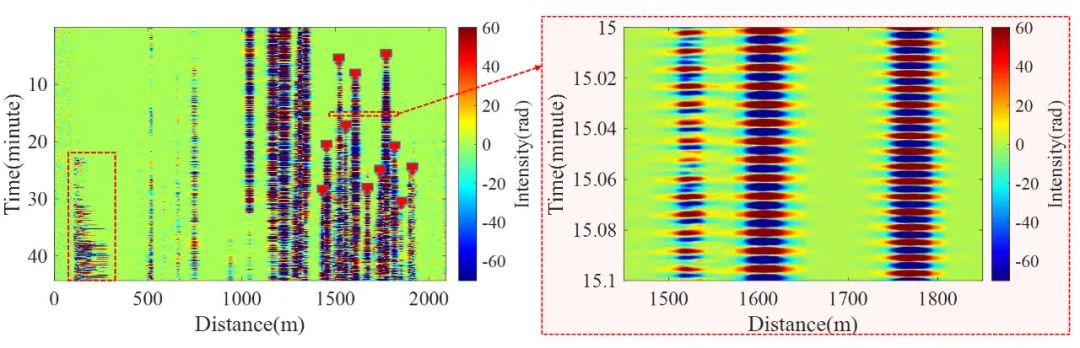
图10 潮汐监测时空分布瀑布图
为了掌握这些扰动的特征,文中选取了1610m位置的一个典型信号,在时域和频域进行进一步分析,如图11所示。图11(a)为时域波形,红色矩形为600~610s的波形。整个信号呈现呈现出由涨潮引起的缆的周期性振动。缆最大动态应变为±1.8με,与上文水流冲击实验产生的应变数量级相同。图11(b)~(d)是不同频率范围内的功率谱。从图11(c)的频谱可以看出,潮汐产生的振动频率由占主导地位的低频及其高次谐波组成。推测谐波是由于实验场被多个岛屿包围的地形引起的。在图11(d)中,主导频率随时间从2.3Hz变化到2.7Hz,文中猜测这种时变频率特性与复杂的水下流体力学有关。
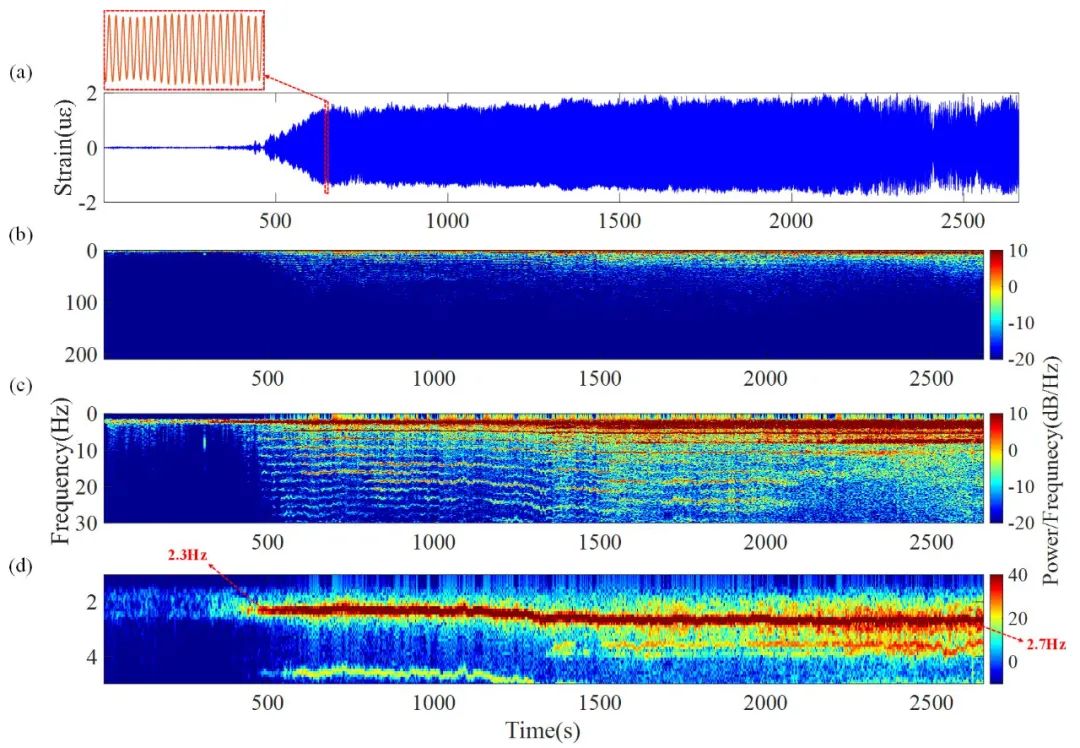
图11 时域波形和1042m处的功率谱。(a)时域波形;(b) ~ (d)时域波形在不同频率范围的功率谱
3.3 基于既有水下缆的周边环境感知
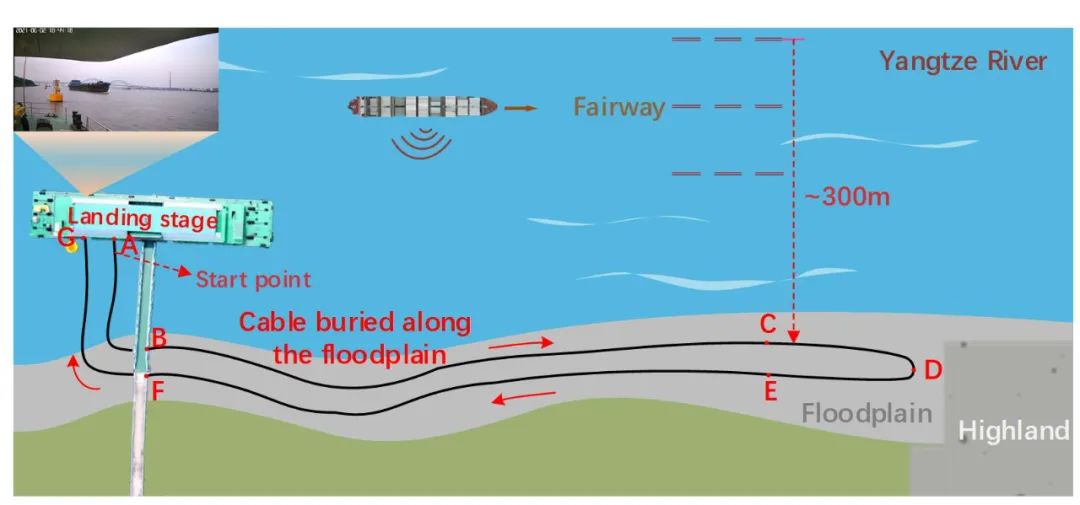
图12 长江滩涂实验现场顶视图(人员运动轨迹监测和船只流量监测实验)
3.3.1 人员运动轨迹监测
为了测试PL Φ-OTDR仪器将来应用于反两栖登陆(如蛙人两栖潜入事件)的监测能力,本文于2021年2月10日开展了人员运动轨迹监测实验,图13为监测结果。图13(a)和(b)分别为实验人员Tom和Jerry运动情况的细节展示,可以清楚地看到,二人分别在t1、t2、t3、t4和t5时刻相遇。大约在630s后,在t3时刻,Tom追上了Jerry,并且二人分别在1040s和1104s停止了跑动。从图13(a)中可以看出,Tom在路线的前半段似乎存在间歇性的“停-跑”动作,而在后半段则是加速跑动。图13(b)展示了Jerry停止跑动后行走的步伐和“铲土-压实”的动作。另外,与图13(a)中跑步时呈现的连续性亮条不同,行走时呈现的是间歇性的亮点。
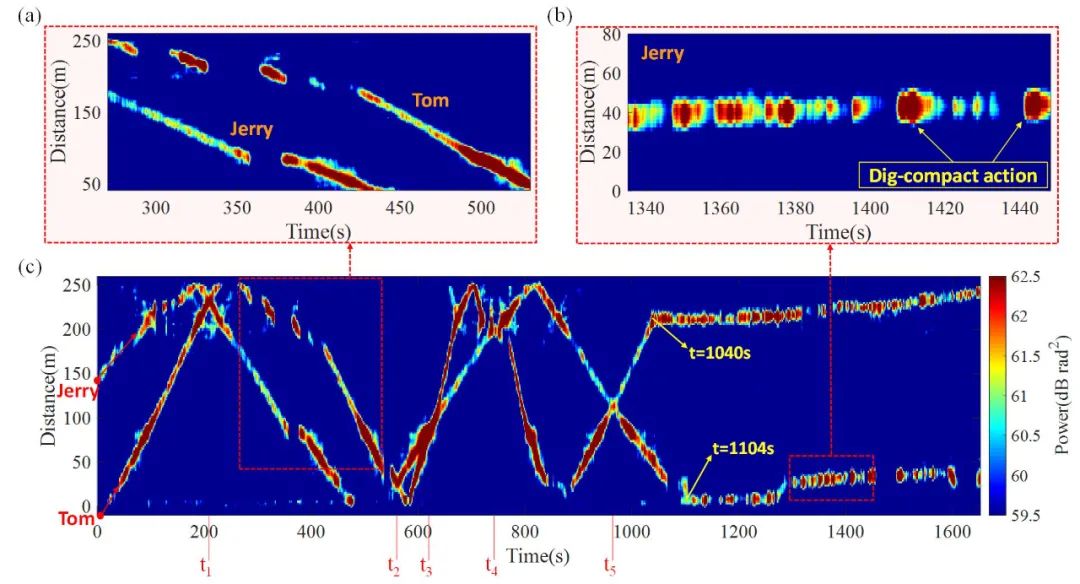
图13 人员移动轨迹监控结果。(a)~(b)细节显示;(c)时空功率分布瀑布图
图14为2021年6月15日15时37分~15时44分多艘船只通过航道时的监测结果。在黄色矩形中可以看到,在缆的200~400m和600m处检测到两艘船通过航道,时差约为40秒。200~400m的缆段靠近航道,因此检测到的信号更明显。400~600m段虽然距离较远,但由于在约600m处采用了湿泥块加固,增加了缆与滩涂地质的耦合,因此响应较强。右侧是被远程监视设备捕捉到的经过航道的两艘船照片。在160m左右,其对称位置在640m,有两个连续的红色亮区,这是因为在这个位置的电缆水平悬浮在水中,受到水流的影响,不断对电缆产生振动。
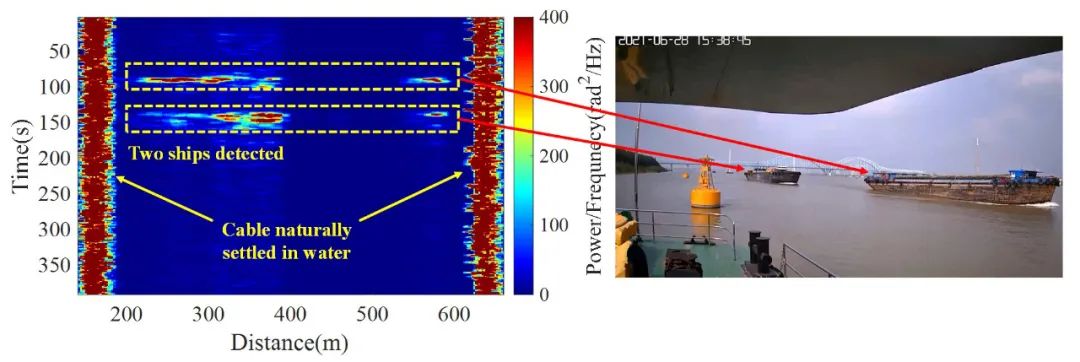
图14 2021年6月20日下午1544多艘船只通过航道的监测结果。左图:重构信号的时空功率分布瀑布图;右图:远程监控设备捕捉到的两艘船
在船只流量监测中,漏报率和误报率均与图14中的强度阈值相关联。在总样本数一定的情况下,漏报率越低,错报率就越高。为了达到二者之间的平衡,本文记录了两周内不同强度阈值下的船只流量监测结果,共计7673个样本,并使用远程监控设备观测了实际通过该航道的船只数量。根据统计数据,本文获得了如图15所示的不同阈值下漏报率和错报率的变化情况。其中,黄色实心点为两种报警率之和,实心线为采用5阶多项式拟合方法获得的拟合曲线。可以看出,随着强度阈值的增大,错报率减小,漏报率增大。当强度阈值为536rad时,二者达到平衡均为8.44%。在阈值为550rad时,总报警率达到最小值17.9%。因此,可以考虑将550rad作为最优阈值。
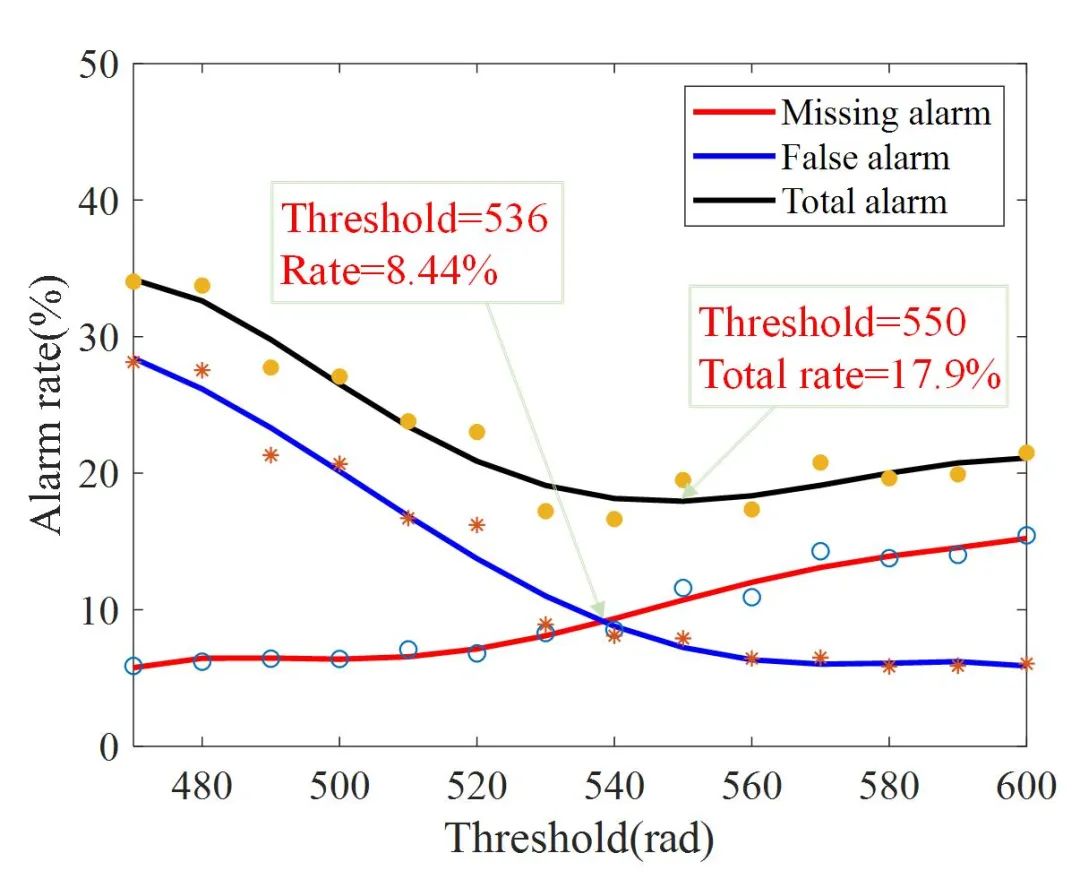
图15 两周内不同阈值下的漏报率和误报率变化情况
04 应用与展望
本文针对Φ-OTDR传感系统提出了一种新颖的PL结构,显著提高了探测灵敏度。针对不同埋深的水下缆状态对监测结果的不同影响,开展了不同场景下的现场实验。通过对不同潜在威胁事件在时域、空间域、频域上的深入分析,获得了各事件的信号强度、时域波形、频率及持续时长等特征,为后续的模式识别研究提供了技术参考。首次实现了各潜在威胁目标事件直接或间接作用于缆形成的动态应变定量测量。实现了基于既有水下通信光缆的抵近船只识别与流量监测,垂直监测距离达到300m。初步证明了所提出的锁相Φ-OTDR系统能够对现有水下通信缆进行实时状态监测和周边环境感知,为水下缆的状态监测和故障预警提供了有效的技术手段。
值得注意的是,在船只流量监测实验中,基于强度阈值的误报和漏报率仍然很高,在其他潜在的应用中也应该存在类似的问题。这就要求本文中的技术与具体应用的结合必须紧密联系,并利用行业背景知识,更早的在实际环境中开展测试活动。对于目标事件的识别,由于环境、背景噪声、振动-缆线耦合条件的差异,在具体应用中很难建立清晰、通用的数学模型。因此,结合样本积累、特征库比较和人工智能算法的技术路线,可能是使这种应用成为现实的唯一途径,这将是本课题组未来的工作之一。此外,本文提出的PL Φ-OTDR系统实现了对非锁相引入的干扰噪声的抑制,但是相关的研究理论推导和解调算法对非锁相的容忍度的研究还未见报道,这将是本课题组未来研究工作的另一重点。
作者简介

张旭苹(通讯作者)教授/博士生导师
南京大学现代工程与应用科学学院教授。南京大学光通信研究中心主任,江苏省光通信系统与网络工程研究中心主任,国务院政府特殊津贴专家,江苏省“333高层次人才培养工程”首批中青年科技领军人才,中国光电技术专业委员会副主任委员,国家光纤传感标准分技术委员会委员,IEEE Nanjing Section Photonics Society Chapter主席。近年来主持了973课题、国家自然科学基金、863项目等来自国家、总装、铁道部、交通部、国家电网等各项基金资助16项,华为科技等企业委托科研项目20多项。已发表高水平论文近200篇,出版专著2部,15项科研成果通过部/省级鉴定,申请/获得国家发明专利、国际发明专利和国防专利98项。作为主持人,曾经荣获2015年吴文俊人工智能科学技术奖进步奖一等奖、2012年教育部技术发明一等奖、2006年教育部科技进步一等奖等十多项奖励。

张益昕(通讯作者)副教授
南京大学现代工程与应用科学学院副教授。中国仪器仪表协会光机电技术与系统集成分会常务理事,中国光学学会光机电专业委员会委员,中国光学学会光学教育专业委员会委员。2006年毕业于东南大学,获学士学位。2011年毕业于南京大学,获博士学位。同年加入新加坡南洋理工大学任博士后研究员。2012年加入南京大学任助理研究员,2015年升任副教授。主要研究方向为分布式光纤传感系统的机理研究与仪器化设计。目前已发表125篇本领域高水平期刊或会议论文,申请/获得了108项发明/实用新型专利,其中79项已获授权,获得省部级科技进步一等奖3项。近年来,作为项目负责人或主要参与人参加了来自国家、省部委以及企业的科研项目共30项的研究工作。在微弱信号检测、高速数据采集、数字信号处理等方面均有较深的理论基础和丰富的实践经验。 审核编辑:郭婷
-
探测器
+关注
关注
14文章
2657浏览量
73319 -
混频器
+关注
关注
10文章
685浏览量
45870
原文标题:Optics Express:基于Φ-OTDR的水下缆在线状态监测及周边环境感知
文章出处:【微信号:光纤传感Focus,微信公众号:光纤传感Focus】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
zigbee怎么实时获取设备的在线状态
输电线路多功能在线状态检测系统技术指南
智能电网输电线路在线监测系统技术指南
基于lora的输电线路状态监测
关于水下或水面状态检测
全高级驾驶员的感知系统
LabVIEW开发工业设备远程在线状态监测
基于虚拟仪器的水电机组在线状态监测系统的研究
继电保护在线状态检修
数控机床控制系统的一部分,远程实时在线状态监测系统
在线扬尘监测系统助力垃圾站环境实时监控

vocs在线监测仪在工业园区的监测方案有哪些?

螺栓松动在线状态监测系统科普以及应用效果
如何有效解决无尘车间半导体制造设备周边环境的振动源






 工商网监
工商网监
评论