 区分ADAS和自动驾驶概念
区分ADAS和自动驾驶概念
近年来随着新能源汽车的渗透率越来越高,汽车行业电动化、智能化和网联化的变革已经被大众熟悉并逐渐接受。越来越聪明的消费者在购车时不仅仅只是考虑品牌、安全、性能等指标,汽车的智能化程度已经成为消费者心中评判汽车吸引力的核心指标之一。最能体现汽车智能化的功能,第一联想到的肯定是自动驾驶功能,其次是能带来优质娱乐体验的智能座舱。今天我们就汽车自动驾驶展开一些话题。
01区分ADAS和自动驾驶概念
自动驾驶目前主要遵照的是美国汽车工程师学会SAE(Societyof AutomotiveEngineers),在2014年制定了自动驾驶的分级标准,按照汽车是否能控制关键驾驶功能的原则,将自动驾驶分为了L0至L5六个等级。
L0:人工驾驶;
L1-L2:辅助驾驶-部分自动驾驶,这个分级对应ADAS(高级驾驶辅助),也是目前汽车比较普及的驾驶级别,预测在2025年渗透率达到70%;
L3:条件自动驾驶,目前部分车企已经宣称可达到L3级别,但是限于国内政策的原因,并未实际商业化落地;
L4:高度自动驾驶,全球主流自动驾驶车企正在依据不同的技术路线寻求突破;
L5:完全自动驾驶,何时能真正实现还是个未知数。
根据2019年1月全国汽车标准化技术委员会发布的《道路车辆先进驾驶辅助系统(ADAS)术语及定义》征求意见稿,将ADAS的功能分为信息辅助类功能和控制辅助类功能两部分。
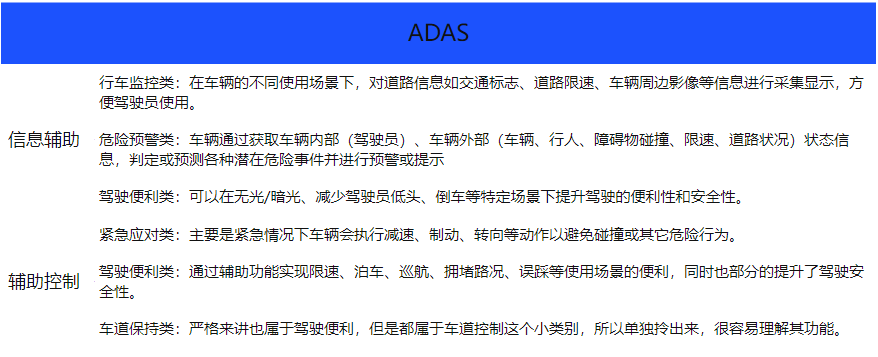
图一,ADAS功能简介
02纯视觉路线和融合感知路线之争
毫无疑问,人类绝对不会满足于目前比较成熟的ADAS(自动驾驶辅助),L4-L5级别的自动驾驶一定是未来的发展趋势,但是全球不同的车企在汽车自动驾驶感知和决策的技术路线走出了不同的道路。
纯视觉路线:典型玩家特斯拉,特斯拉在第三代自动驾驶硬件方案上,一开始有1个前置毫米波雷达,8个摄像头和12和超声波传感器,在2021年5月以后就把毫米波雷达取消了。全球超过200万辆保有量的规模给特斯拉带来了庞大真实的高质量免费数据,配合先进的神经网络算法和匹配自身需求的自研芯片,进行了长期且大量的数据训练。根据特斯拉2022AI day的说法,在30PB 的数据积累下,每8分钟就能训练一个神经网络模型。
融合感知路线:国外以Waymo为代表,国内就是百度,华为和蔚小理等,以蔚来ET7为例,感知硬件包括1个超远距激光雷达、5个毫米波雷达、12个超声波传感器、14个摄像头。不同传感器在功能上是相互补充的,比如从摄像头中2D的图片中提取3D的信息是很困难的,这里就可以利用激光雷达去构建3D模型获取3D信息,同时不同传感器中获取相同的信息而形成信息冗余,利用好也可以提高系统的稳定性。

图二,感知用不同硬件简介
03自动驾驶决策核心—算力芯片
高算力芯片是实现自动驾驶的基础,但是目前除了特斯拉采用根据需求匹配自研的方式外,绝大多数车企都采用第三方的算力芯片,如下图我们截取了部分达到L3级别以上的自动驾驶芯片信息。媒体上通常采用算力来衡量芯片支持自动驾驶能力的强弱,有一种说法是L2级辅助驾驶所需数据量相对较少,计算能力大致仅需要10TOPS,但随着技术不断升级,L3和L4级所需数据量将会激增,分别需要约20-30TOPS和200-500TOPS的算力支持。而今年9月份,英伟达和高通先后发布了单芯片算力高达2000TOPS的解决方案,直接掀起了业内巨浪,给其他玩家带来了冲击。
表面上看国产新势力自动驾驶系统目前采用英伟达Orin*4芯片的方案架构算力高到1000TOPS,已经远高于特斯拉采用FSD*2芯片总算力值144TOPS的方案,但是外界目前还未看到硬件的高配置带来绝对的优势。而英伟达最新发布的算力高达2000TOPS的Thor SOC芯片,设计上能够实现多域计算,可以为自动驾驶和车载娱乐划分任务,本身就是为中央计算式EE架构所打造,起点就处于更高的层次。
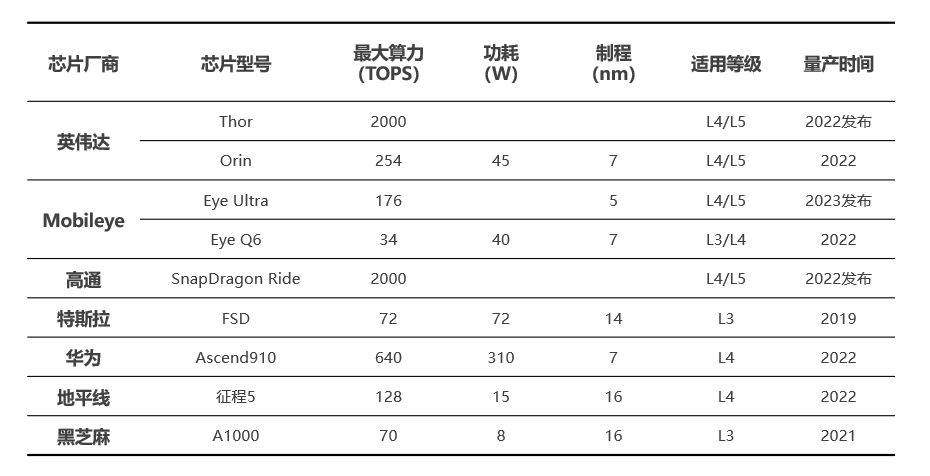
图三,部分L3级别以上自动驾驶芯片
最后,在不久的未来,汽车中控芯片和各域芯片之间的联系也日趋紧密,数据传输也会遇到诸多挑战,车规级接口IP作为汽车电子SOC设计的重要组成,奎芯科技也作了诸多布局,比如风头正盛的专为汽车而生的MIPI A PHY,有兴趣的小伙伴可以看一下往期回顾。
审核编辑 :李倩
-
汽车电子
+关注
关注
3027文章
7987浏览量
167376 -
adas
+关注
关注
309文章
2187浏览量
208735 -
自动驾驶
+关注
关注
784文章
13884浏览量
166670
原文标题:汽车电子芯片的革命与创新-系列4
文章出处:【微信号:IP与SoC设计,微信公众号:IP与SoC设计】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐








康谋分享 | 直面AD/ADAS快速开发挑战:IVEX自动驾驶场景管理及分析平台!






 工商网监
工商网监
评论