 如何将AI应用于高级自动驾驶的规控
如何将AI应用于高级自动驾驶的规控
AI通常用于为高级自动驾驶的车辆提供感知能力。但AI也能帮助自动驾驶汽车(AV)在规划和控制方面做出更安全的决策吗?任何习惯于基于控制理论的确定性算法的人都很难被说服。但Infineon提出了一个激进的反驳,并一直在与汽车行业的利益相关者就其安全问题进行辩论。
AI安全吗?AI驱动的汽车可靠吗?它们能被验证吗?
这些都是向高级自动驾驶车辆的开发人员提出的好问题。
随着先进的神经网络在计算机视觉方面得到良好发展,在AV上使用AI已经成为一种公认的规范。不过,这仍然是一个信任的问题。
Infineon的嵌入式AI和自动驾驶专家Florian Hauer表示,AI可以帮助机器感知它所看到的东西(行人、信号灯、自行车……),并获得对环境获的“非常高级的抽象理解”,从而知道如何在该环境中采取行动。
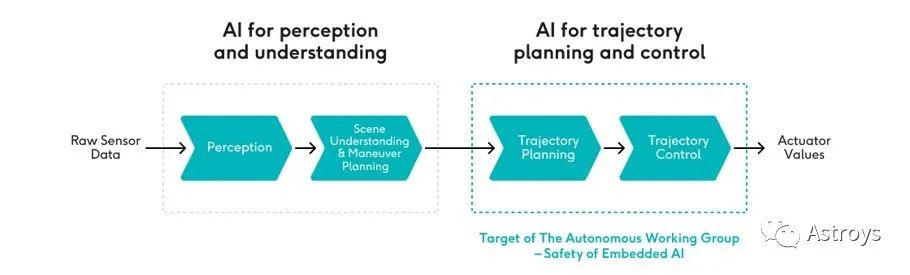
在自动驾驶的计算链中,这些最初的步骤被称为感知和场景理解。它们是为高级自动驾驶车辆规控系统做准备的两个基本模块。
计算机视觉在前两个模块中起着关键作用。Hauer说:“你已经在使用AI作为主要解决方案。在感知和场景理解方面,我认为没有人会回到深度学习技术之前。”
然而,他补充说,AI在规控中却“很少或几乎不使用”。
Hauer说:“通过轨迹规划,车辆可以在接下来的1-5秒内绘制出它必须走的路径,以执行某些操作,如在信号灯前停车或变道。在轨迹控制中,规划的路径在道路上被执行。车辆决定向左或向右行驶。它可以选择在时间和空间中移动的速度,以及何时应该加速或减速。”
为了执行涉及规控制的安全关键计算,今天的高级自动驾驶车辆使用成熟的确定性算法,该算法基于由业内专家在40多年间开发的控制理论。Tier1和OEM对经典算法有着“共同的理解”,对安全的定义也达成了一致。到目前为止,汽车生态系统中的大多数参与者还没有考虑过使用AI进行规控。
Infineon正在打破这一模式,建议业界应用AI来增强用于规控的确定性算法。Hauer说,目标不是取代经典算法,而是提高它们的安全性、可靠性和效率。
Infineon在推进嵌入式AI的安全性方面有既得利益,其最新的Auriz MCU具有嵌入式AI能力。但它提出的使用AI进行规控的建议目前只是一个假设。Hauer承认首先需要回答安全问题,而将AI应用于规控中“安全意味着什么”是一个“不能由单个公司回答”的复杂问题。
因此,Infineon迫切希望在利益相关者之间建立“共识”。该公司来到TTTech成立的汽车行业合作论坛The Autonomous,分享其假设,与主要参与者合作,并领导一个关于嵌入式AI安全性的工作组讨论。
动机
是什么促使Infineon建议将AI应用于高级自动驾驶的规控?为什么这对汽车行业如此重要?
该公司系统架构和应用高级负责人Jürgen Schäfer表示,答案可以归结为高级自动驾驶车辆达到量产所需的“成本和能效”。
许多人认为如今的AV设计过度。在Schäfer的观点中,“今天的AV原型的利润率可以降低”。出于安全考虑,AV公司复制计算链,在独立的信号处理链上运行两种算法,使用的不是一个而是一组控制器。考虑到现实驾驶的不确定性,系统可能很难应对意外。因此,工程师们觉得在AV系统中设计一个广泛的安全冗余更舒服,Schäfer观察到,冗余被认为可以增强安全性。
Schäfer说,虽然在先进的架构中冗余被认为是必要的,但AV公司最终推出了成本过高的AV原型,部署了“消耗2000W的电子控制系统”,并“使用液冷单元,这进一步增加了成本,使系统不可靠”。
使用机器学习算法可以帮助系统设计者避免过度设计。他说:“最终,机器学习算法是唯一能从数学上预测未来的算法。通过机器学习算法,你可以说,例如,基于系统和环境在过去20秒的表现,(这就是)下一秒可能发生的事。”
在尝试以线性方向预测未来时,你可以查看系统环境并谨慎地进行,但是你仍然可能遇到阻碍系统反应能力的紧急情况。Schäfer表示,以“随机方式”预测未来的机器学习算法,通过一个涉及随机确定的事件序列的过程,有望更好地避免这种僵局。
安全用例为AI在规控中的应用建立一个安全用例并不简单。Hauer承认,在行业发展到这一步之前,许多过程都会发挥作用。
他说,首先,将AI整合到规控中会影响开发过程的不同阶段。必须确定和分析相关的开发步骤,以确定它们对系统其余部分的影响。
接下来要考虑的是数据。数据是否具有代表性?它是有意义的吗?Hauer说:“在收集数据以处理极端情况时,我们需要了解神经网络是否被正确训练或过度拟合,或者它是否学习了正确的东西。”
Hauer指出,理解使用AI的影响和“副作用”是一回事,考虑它的“设计含义”是另一回事。“例如,我们能否为AI构建一个安全包装?如果系统检测到AI的建议不可取,我们能否构建一个经典的算法来介入?”
为了建立安全论点,Hauer说,Infineon的策略是“使用一些非常具体的、特定的用例,看看我们是否可以降低风险”,简单地告诉工程师“在规划中使用AI太抽象且对任何人都没有帮助,所以我们正在开发一些具体的规控示例”。
他重申,目标是降低风险。“我们想要深入到技术层面,实际观察这些例子,看看哪些是问题实例,以及我们如何使它们安全。”在这样做的过程中,“我们制定或派生一个‘解决方案类型’”。
Hauer说,标准化并不是The Autonomous的工作小组的目标。相反,该小组计划提供一个参考解决方案,其中可能包括算法建议和最佳实践。
使用哪种神经网络?
应用于计算机视觉的神经网络有着很长的历史。但什么样的神经网络将被用于规控呢?
Hauer回答说:“我们不会更换整个模块。相反,我们正在增强它。因此,我们可以在哪里以及如何进行增强,有很多选择。”
他指出,单就规划而言,“你有一堆不同类别的解决方案,而每一类都有大量不同的技术来运用它们。而对于每一种技术,你都有大量的选择,如何用AI来增强它。”
换句话说,没有一个单一的、标准的网络可以完成这项工作。
Hauer补充说,一个重要的说明是,计算机视觉和规控执行两种完全不同的工作。计算机视觉提供检测、分类和分割。为了增强规划,必须执行的任务是回归和预测。回归使用一种统计方法,试图确定一个因变量和一系列其他变量之间关系的强度和特征。这为预测接下来发生的事奠定了基础。
因此,在计算机视觉和规控中使用的网络类型是不同的。后者会小得多,因为规划只是想知道下一步是什么样子。
Hauer说,在解决预测问题时,最有价值的结构是众所周知的拓扑结构,如循环神经网络。他描述了一种被称为LSTM(long short-term memory)的特定网络类型,它模拟了大脑的工作方式。当你第一次看到某物时,你会把它放入你的短期记忆中,并试图理解它的来源和含义。如果理解了,那么这个物体或经历就会进入长期记忆。其基本思想是,要预测一个结果,你需要足够的历史来理解上下文。
相比之下,MLP(multilayer perceptron)是原始的神经网络结构。它是一个前馈人工神经网络,从一组输入生成一组输出。Schäfer说,MLP是在1960年左右发展起来的,而LSTM在1998年才首次发表,从数学角度来看是非常新的神经网络。
时间表
该公司的嵌入式AI安全工作组今年开始工作。根据Hauer的说法,该工作组的时间表为18个月,目标是在2024年发表技术论文或技术报告。
Infineon认为,嵌入式AI控制器,如Aurix MCU,可以在包括高级自动驾驶车辆在内的应用中提供低延迟、低处理功耗的解决方案来解决复杂问题。为了获得车厂的支持,Infineon必须建立一个安全用例论证,将AI应用于AV的规控等任务,可以降低安全风险。为此,它需要来自行业利益相关者的合作。
-
AI
+关注
关注
87文章
30172浏览量
268433 -
机器学习
+关注
关注
66文章
8378浏览量
132417 -
自动驾驶
+关注
关注
783文章
13687浏览量
166154
原文标题:AI能否应用于自动驾驶规控领域?
文章出处:【微信号:Astroys,微信公众号:Astroys】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
使用PVA引擎优化自动驾驶汽车CV开发流水线

自动驾驶汽车安全吗?


Rapidus与电装共享芯片设计,加速AI与自动驾驶发展


美国拟禁止自动驾驶汽车使用中国软件
FPGA在自动驾驶领域有哪些优势?
FPGA在自动驾驶领域有哪些应用?
初级自动驾驶架构师应该学习哪些知识
未来已来,多传感器融合感知是自动驾驶破局的关键
滴滴自动驾驶与广汽埃安联手推出L4自动驾驶量产车型
自动驾驶已成现实?赛思时间同步服务器赋能北京市高级别自动驾驶示范区,为自动驾驶提供中国方案

LabVIEW开发自动驾驶的双目测距系统
自动驾驶“十问十答”






 工商网监
工商网监
评论