 计算机视觉之摄像机标定目标
计算机视觉之摄像机标定目标
审核编辑:彭静
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
摄像机
+关注
关注
3文章
1601浏览量
60037 -
计算机视觉
+关注
关注
8文章
1698浏览量
45993
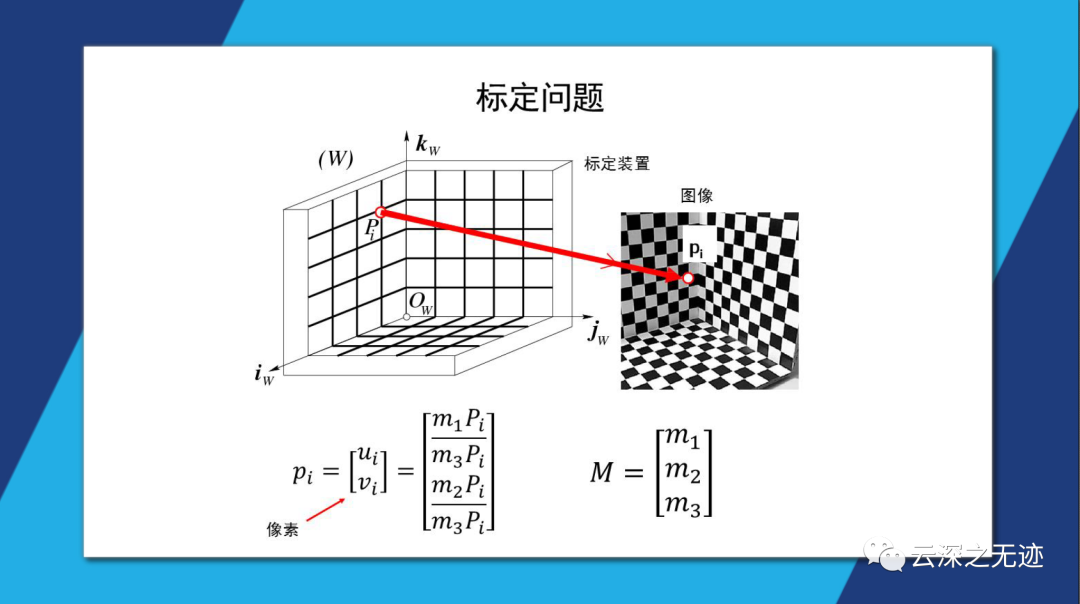
原文标题:计算机视觉之三维重建篇.2(摄像机标定)
文章出处:【微信号:TT1827652464,微信公众号:云深之无迹】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
如何将Canon数码摄像机连接到计算机上?
如何将Canon数码摄像机连接到计算机上? 将便携式摄像机连接到计算机时只能使用 DV 连接线(IEEE1394 连接线)。 &
发表于 03-16 10:45
基于Dragonboard 410c平台的机器3D视觉—摄像机标定原理
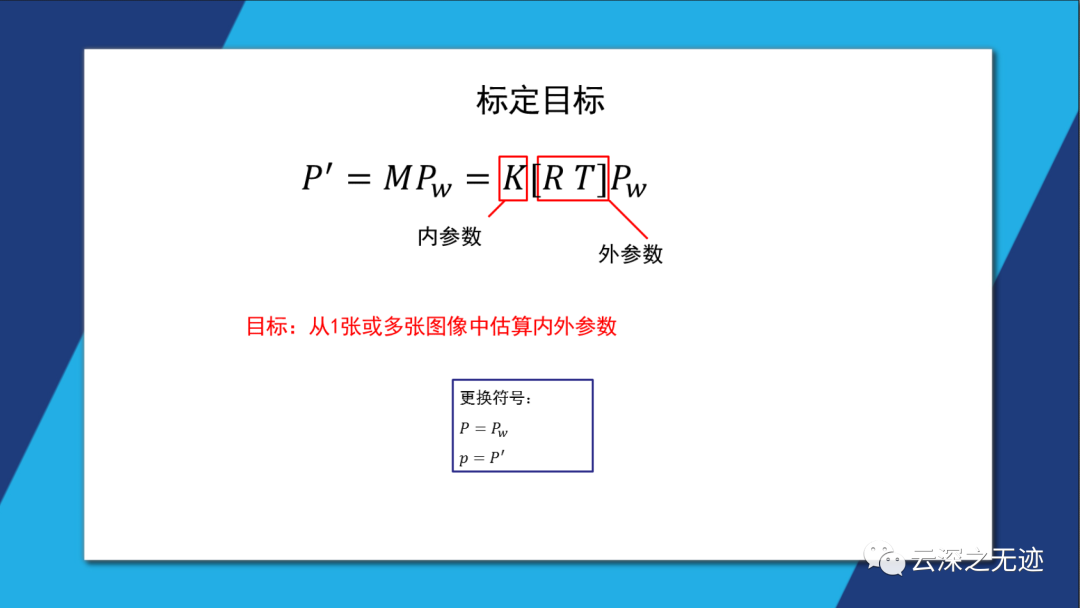
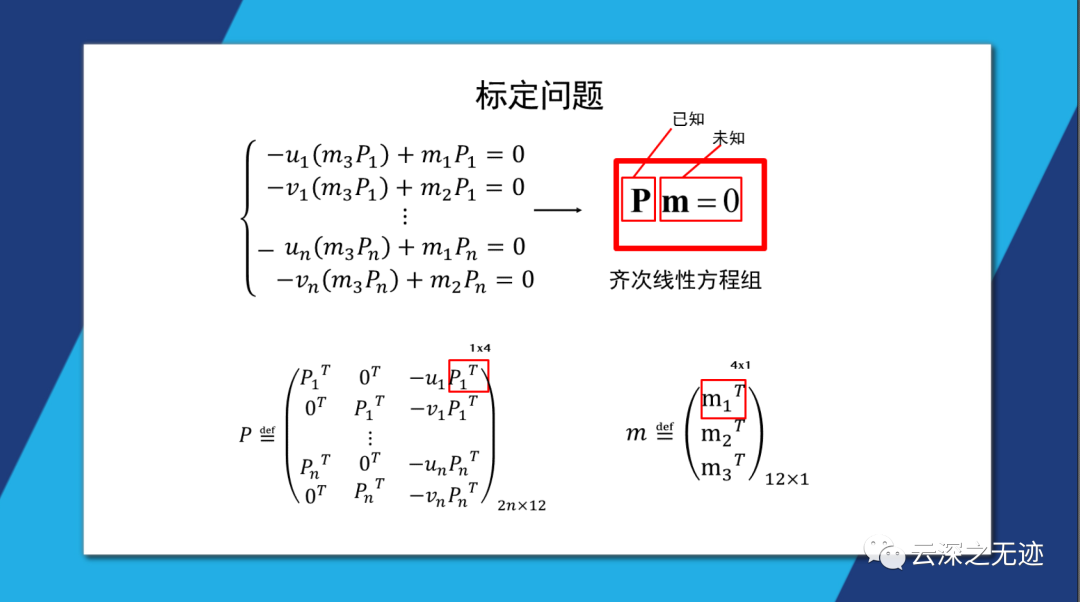
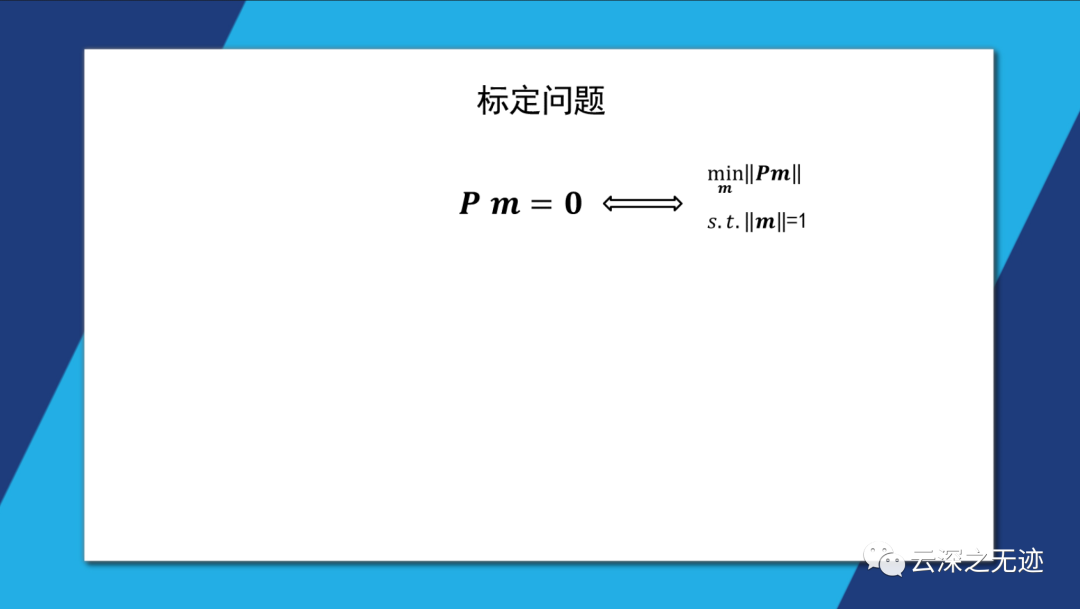
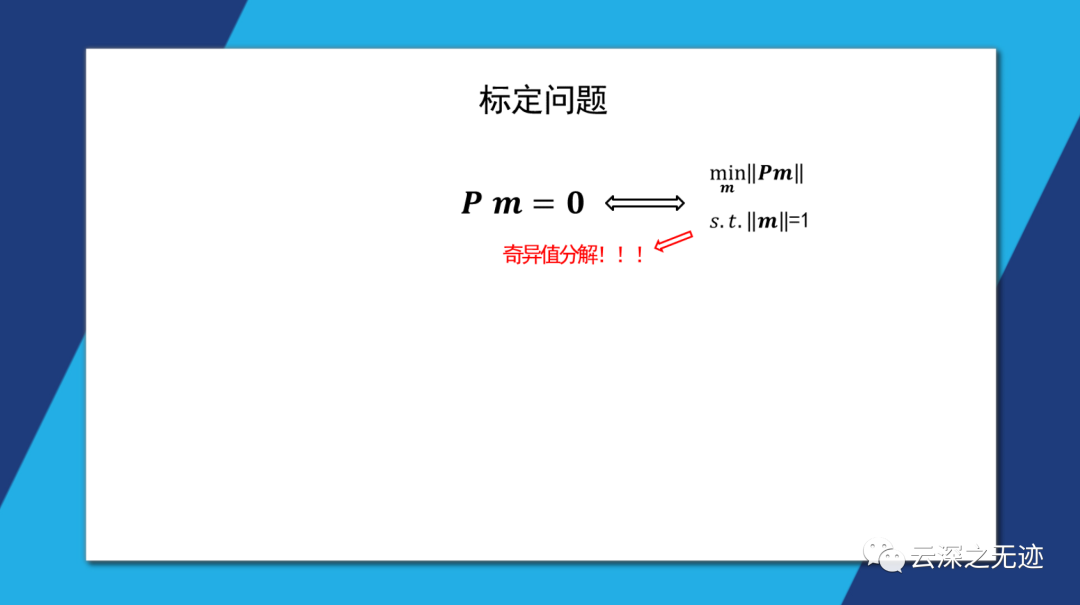
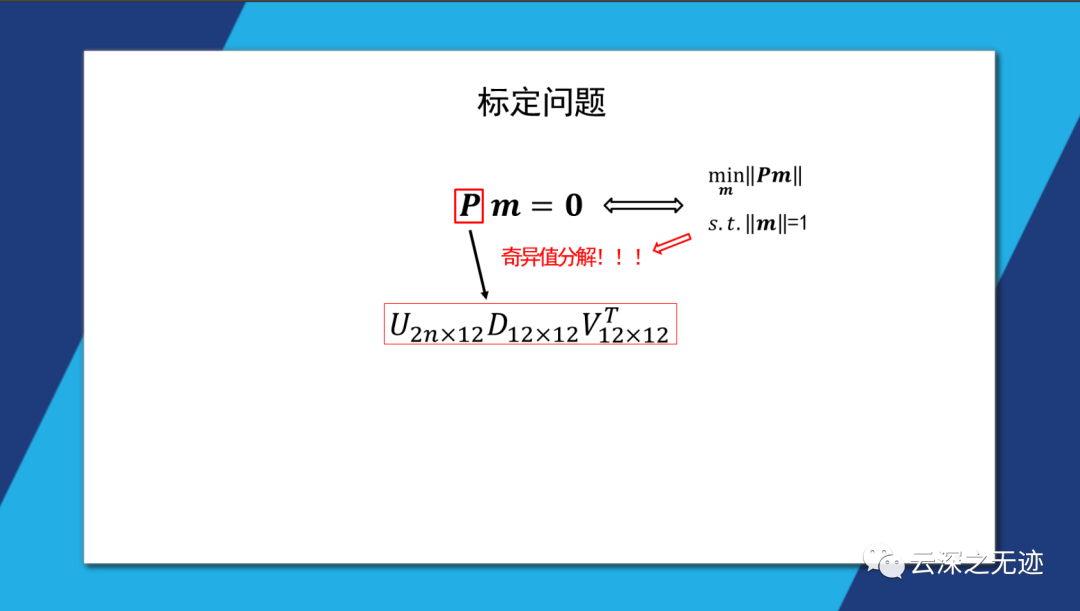
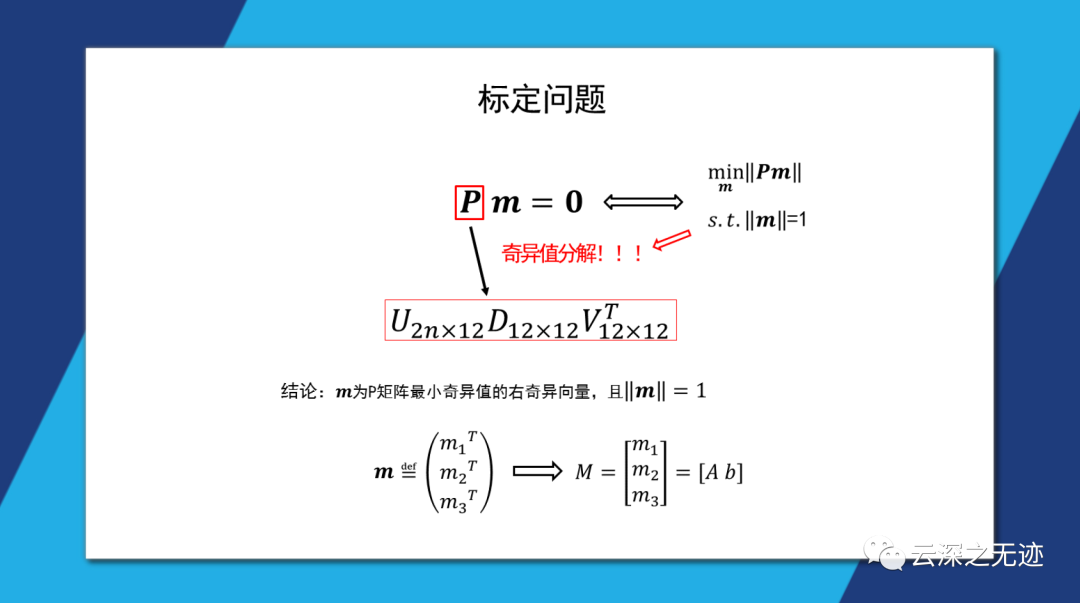
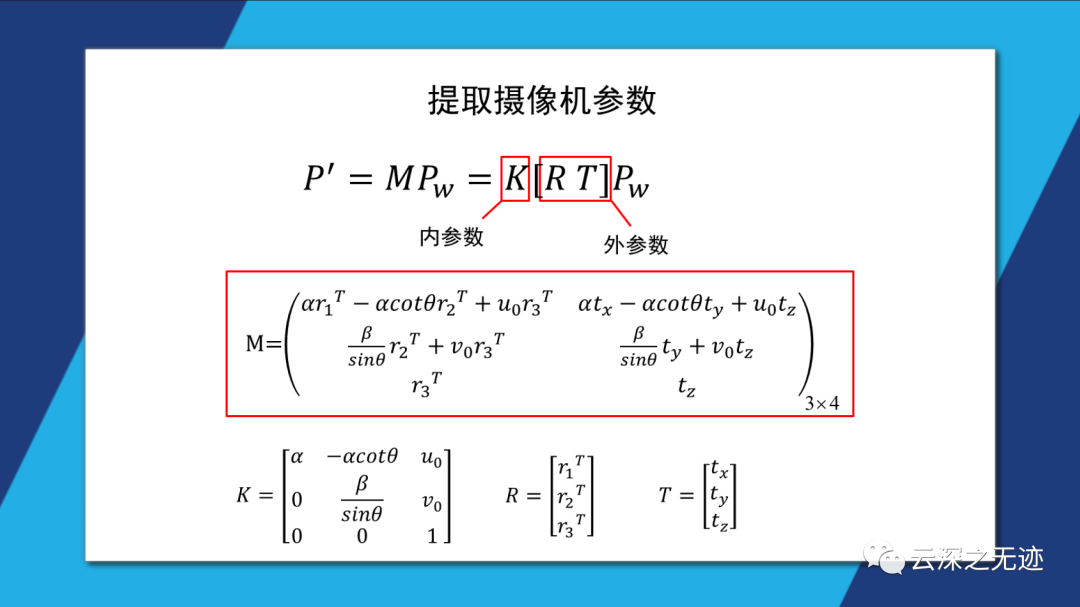
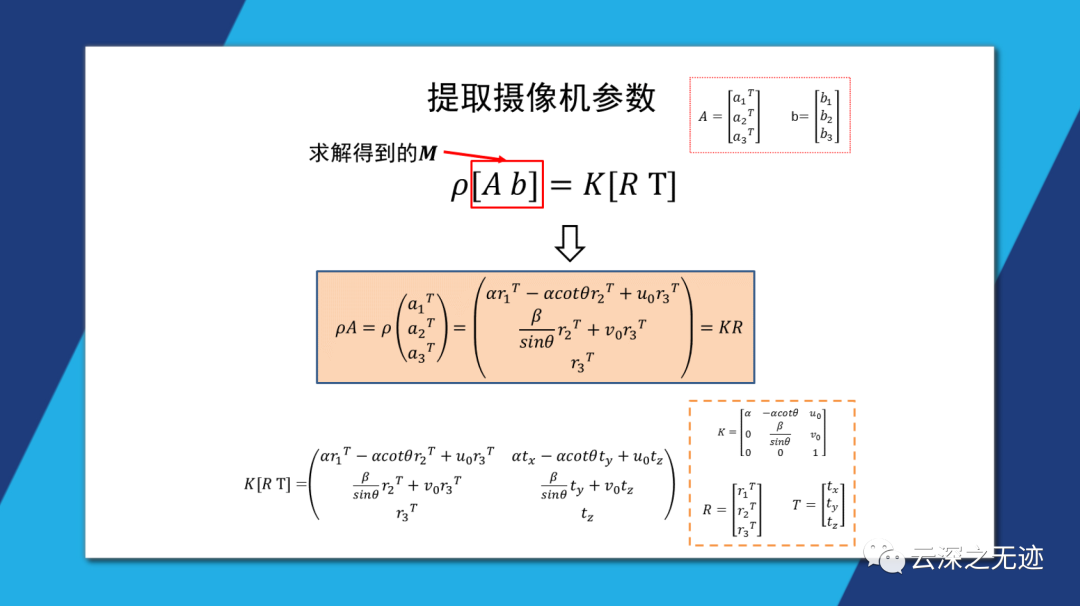
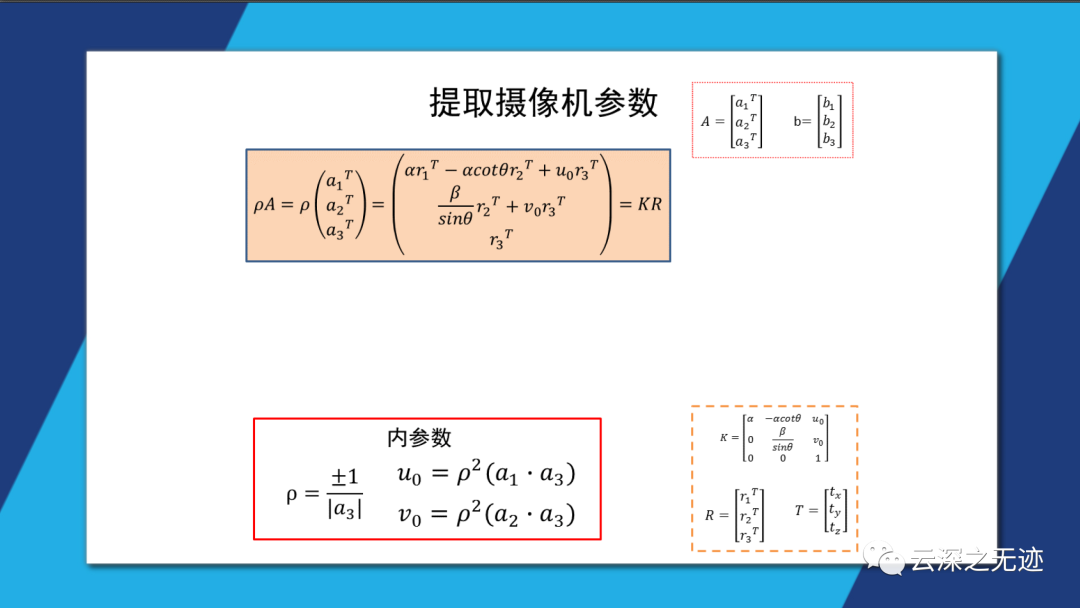
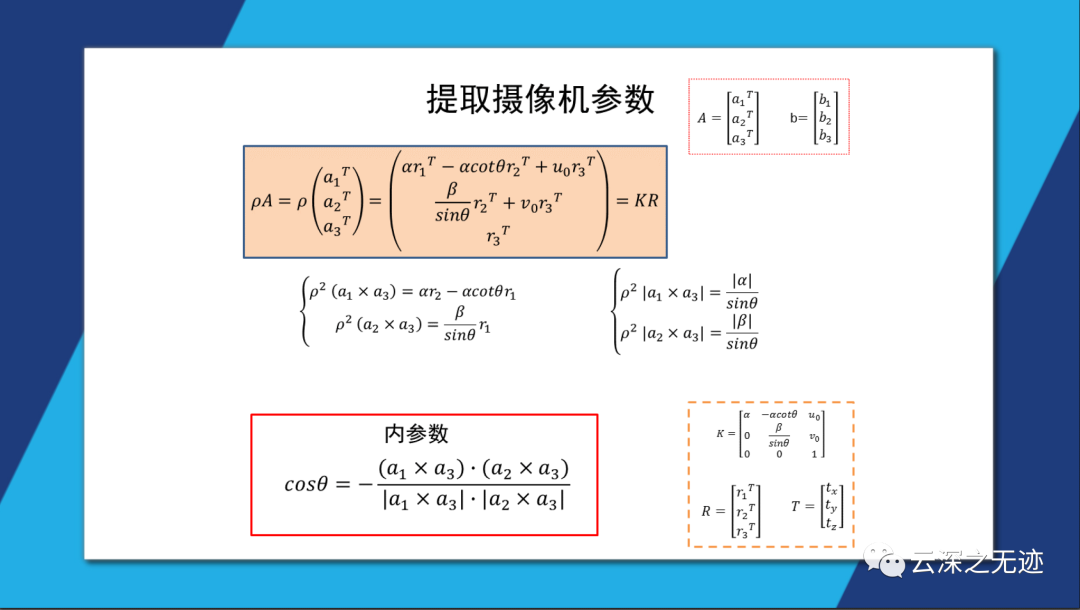
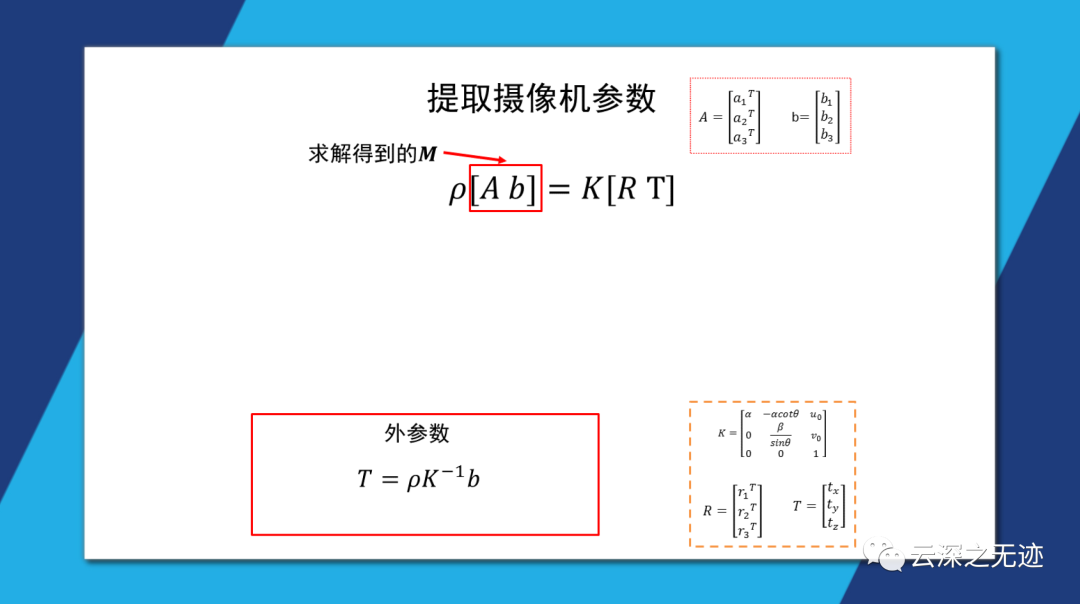
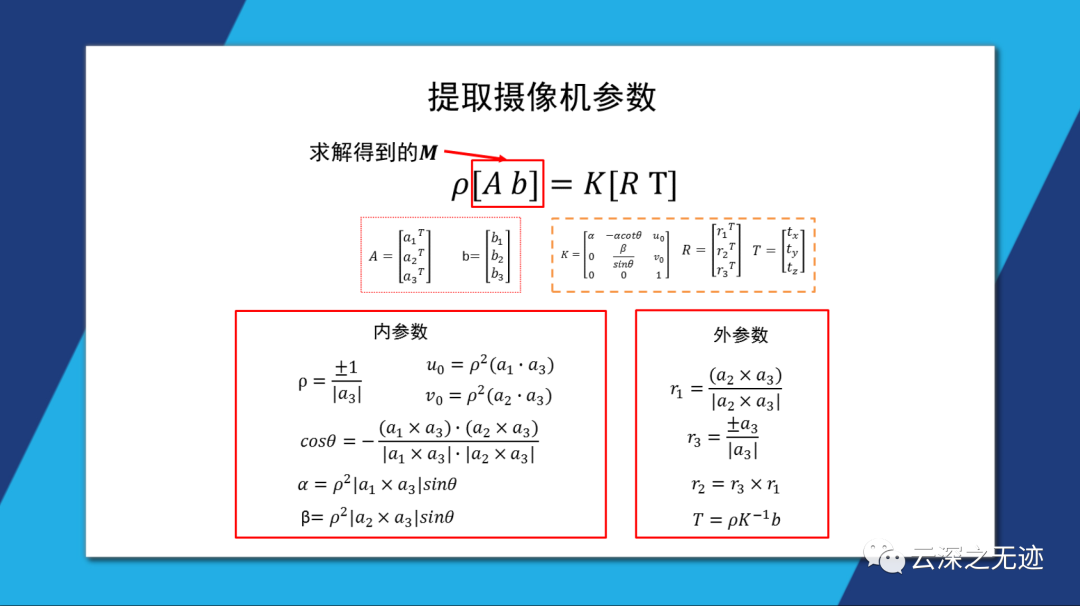
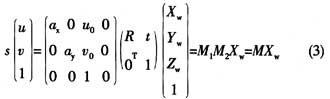
参数在计算机标定的时候计算出来即可,其矩阵表示如下: 以上就是整个摄像机标定的基本原理和相关概念,在机器3D
发表于 09-28 10:32
四元数数控:深圳机器视觉系统由什么部分组成?
相机,连接到硬件设备后,只要对参数进行相应的设置,既可以获得图像;(2)摄像机标定计算机视觉的任务就是从摄像机获取的图像信息中计算出三维空间
发表于 11-17 11:27
CCD摄像机标定的研究
在计算机视觉中,二维计算机坐标和三维物体空间坐标的关系可通过摄像机模型来建立。模型中的参数包括:摄像机几何、光学特性参数(内参数)及
发表于 08-05 15:29
•41次下载
简易摄像机标定方法
以简化以往的摄像机标定技术为研究目的,分析了标定算法对于前期图像处理的要求,给出了基于MATLAB 的简易 摄像机 标定方法。该方法借助于常
发表于 06-13 15:52
•39次下载

基于OpenCV的单目摄像机标定
本文CameraCalibrator类源代码来自于OpenCV2 计算机视觉编程手册(Robert Laganiere 著 张静 译) 强烈建议阅读机器视觉学习笔记(4)——单目摄像机
发表于 02-08 03:36
•832次阅读
机器视觉中的摄像机标定和自标定分析
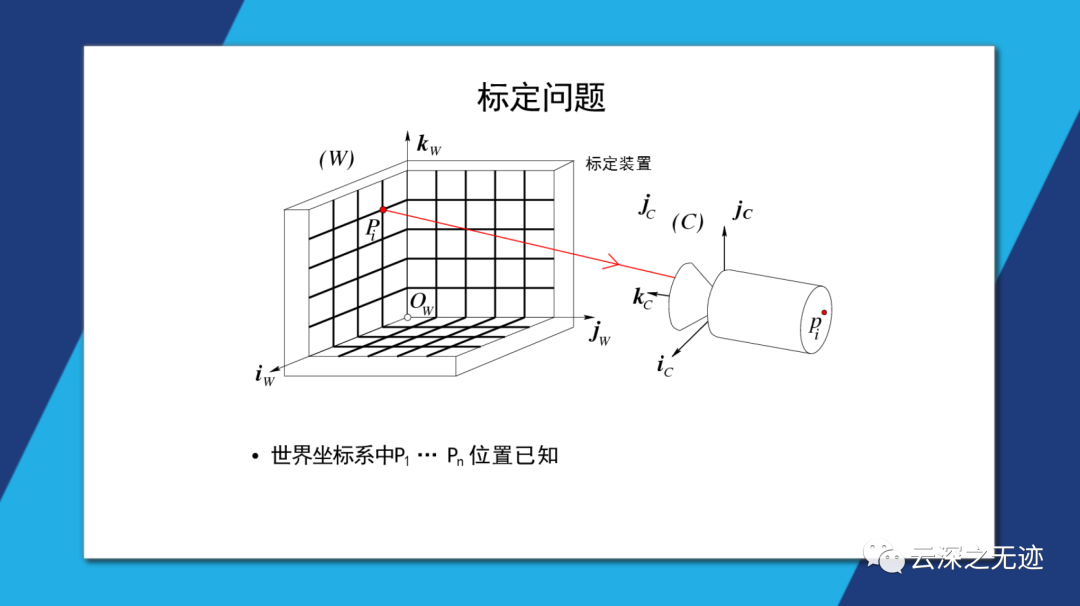
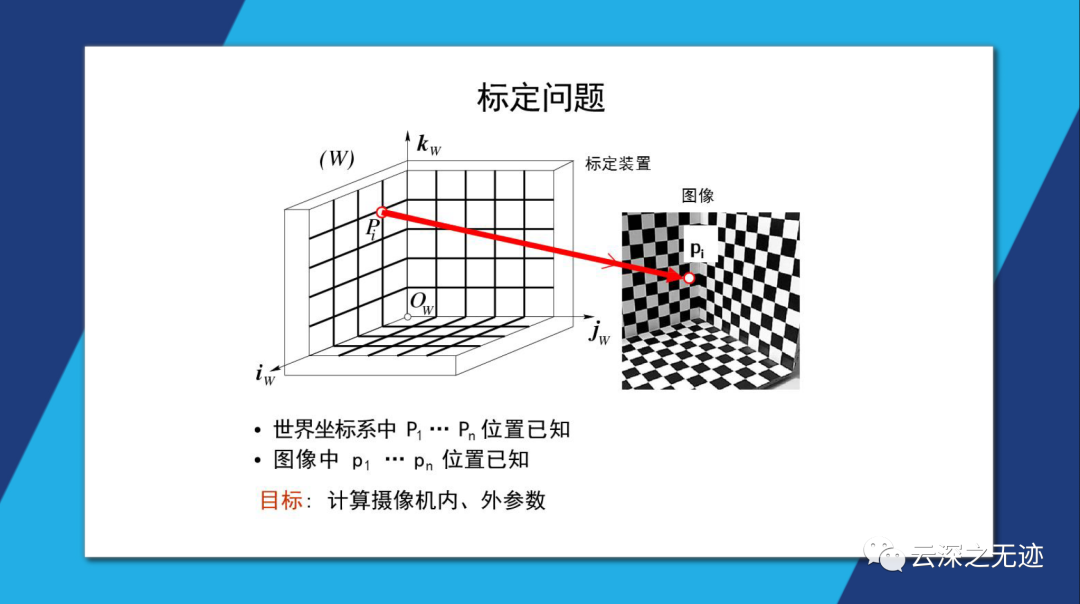
机器视觉的基本任务之一是从摄像机获取图像信息并计算三维空间中物体的几何信息,以由此重建和识别物体。而空间物体表面 某点的三维几何位置与其在图像中对应点之间的相互关系是由摄像机成像的几何
发表于 11-17 17:53
•1.5w次阅读
机器视觉学习笔记:摄像机标定技术
空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系是由摄像机成像的几何模型决定的,这些几何模型参数就是摄像机参数,为了得到这些参数而进行的实验与计算的过程称为摄像机
机器视觉中摄像机标定的目的是什么
空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系是由摄像机成像的几何模型决定的,这些几何模型参数就是摄像机参数,为了得到这些参数而进行的实验与计算的过程称为摄像机
发表于 11-03 11:07
•1432次阅读





 工商网监
工商网监
评论