 KUKA位置的坐标输入
KUKA位置的坐标输入
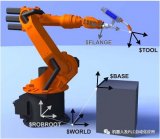
$ROBROOT
机器人位置
结构类型 FRAME 的变量指明基于 WORLD 坐标系的 ROBROOT 坐标系位置。
X、Y、Z:原点沿着轴的推移,单位:[mm]
A、B、C:轴角度的旋转,单位:[°]
ROBROOT 坐标系始终位于机器人足部。在默认配置中,ROBROOT 坐标系与 WORLD 坐标系是一致的。
地面安装:默认情况下无推移
$ROBROOT={X 0.0,Y 0.0,Z 0.0,A 0.0,B 0.0,C 0.0}
天花板安装:轴转角 C 转动 = 180°
$ROBROOT={X 0.0,Y 0.0,Z 0.0,A 0.0,B 0.0,C 180.0}
墙上安装:轴转角 B 转动 = 90°
$ROBROOT={X 0.0,Y 0.0,Z 0.0,A 0.0,B 90.0,C 0.0}
机器人位于生产单元内的特定位置上 ($ROBROOT<> $WORLD)。将基于 $WORLD
的机器人位置的坐标输入 $ROBROOT。
审核编辑:彭静
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28841浏览量
209334 -
World
+关注
关注
0文章
5浏览量
6224
原文标题:KUKA 系统变量: $ROBROOT
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
如何使用ESP12E板来获取位置的实时坐标
你有没有想过在不使用任何 GPS 硬件的情况下获取设备的位置?听起来不错!!是的,只需使用 NodeMCU ESP 板就可以获取位置坐标,而无需任何额外的硬件。在这里,我们将使用ESP12E 板来
求助 如何提取图像中的鼠标位置坐标
`求助 如何把图像中鼠标所在位置的坐标提取出来,之前看过提取鼠标位置的程序,可惜只是整个面板的鼠标位置,如何才能将图中下面的像素点坐标提取出
发表于 04-23 15:40
labview运动位坐标位置控制
想通过表格设置电机的每次运动位置,且表格必须在上一行有坐标参数的情况下,才能输入下一行的坐标参数,并且自动更新行首的第X点,如何实现?
发表于 07-06 17:19
使用pads封装制作pcb时如何输入xy坐标定位孔位置 ?
现公司要求全部用PADS画板,原来用allegro的,刚开始学习PADS,在做封装时发现不知道如何输入xy坐标精确定位。焊盘脚是可以修改XY坐标位置,现在不知道空位孔如何定位了。哪位大
发表于 12-10 09:56
KUKA机器人问题解答
开机后没有选择工具。 解决方案:配置→当前工具/基坐标→工具号→1 2 专家登陆 一般情况,开机后我们要编辑程序时,首先我们要登陆专家级别,有助于我们操作。 解救方案:配置→用户组→专家→登陆→密码KUKA→登陆
发表于 07-15 07:48
CAD坐标标注中如何标注普通坐标
,给出各个需要标注的坐标位置点进行标注(如果当前未定义基准坐标,命令自动切换到标注基准坐标),命令行提示如下。当前绘图单位:毫米请输入
发表于 03-11 13:38
KUKA机器人应用及系统概述
KUKA机器人工具坐标系的建立执行方法:将待检测的工具安装在法兰上,找出一个合适的参考点 它可以是固定在工作空间的某一参考芯。
发表于 10-16 15:15
•9次下载
关于KUKA 焊接机器人
KUKA 为各种复杂的焊接任务都准备了正确的软件:因此在焊接前就能用 KUKA.TouchSense 和 KUKA.SeamTech Finding 精确地确定工件或焊缝的位置。
KUKA C4机器人轨迹BASE与TOOL坐标
我们通过KUKA计算器或着运算程序可以得出:这个X向的偏差可以使工具坐标的X偏移9.848,Y方向偏移1.736A旋转10.0这就偏差的换算。表面上是工具的X方向 偏差,但是如果你想消除这个偏差你需要改变TOOL坐标的X,Y,和
KUKA机器人之PFO飞行焊控制
机器人在执行焊道位置示教程序时,当机器人运行到焊道轨迹点时,通过KUKA 用户程序记录焊道的程序号,焊点号,焊道图形属性和坐标值,然后存到PFO应用软件数据库里。
KUKA C4机器人的轨迹BASE与TOOL坐标
。 WORLD 世界坐标系 在供货状态下与 ROBROOT坐标系中一致。 可以从机器人足部 “ 向外移出 ”。 说明世界坐标系在 ROBROOT 坐标系中的
使用LabVIEW的鼠标坐标反馈
当事件发生时,鼠标的位置坐标是很重要的信息,有时我们也需要提取鼠标坐标的历史轨迹来作为分析问题的工具,通过实验软件得到鼠标当前处于屏幕中的坐标位置
发表于 02-24 08:00
•26次下载
KUKA系统函数FORWARD()是如何计算空间中笛卡尔位置的
功能 FORWARD 从机器人和附加轴的轴角度中计算空间中的笛卡尔位置 (基坐标系)。





 工商网监
工商网监
评论