 更换机器人过程中出现MAM文件数值丢失故障原因
更换机器人过程中出现MAM文件数值丢失故障原因
MAM 文件(零点校准标记槽偏差)
参照调整适用于对正确调整的机器人进行维护并由此导致调整值丢失时进行。
示例:
更换 RDC
更换电机
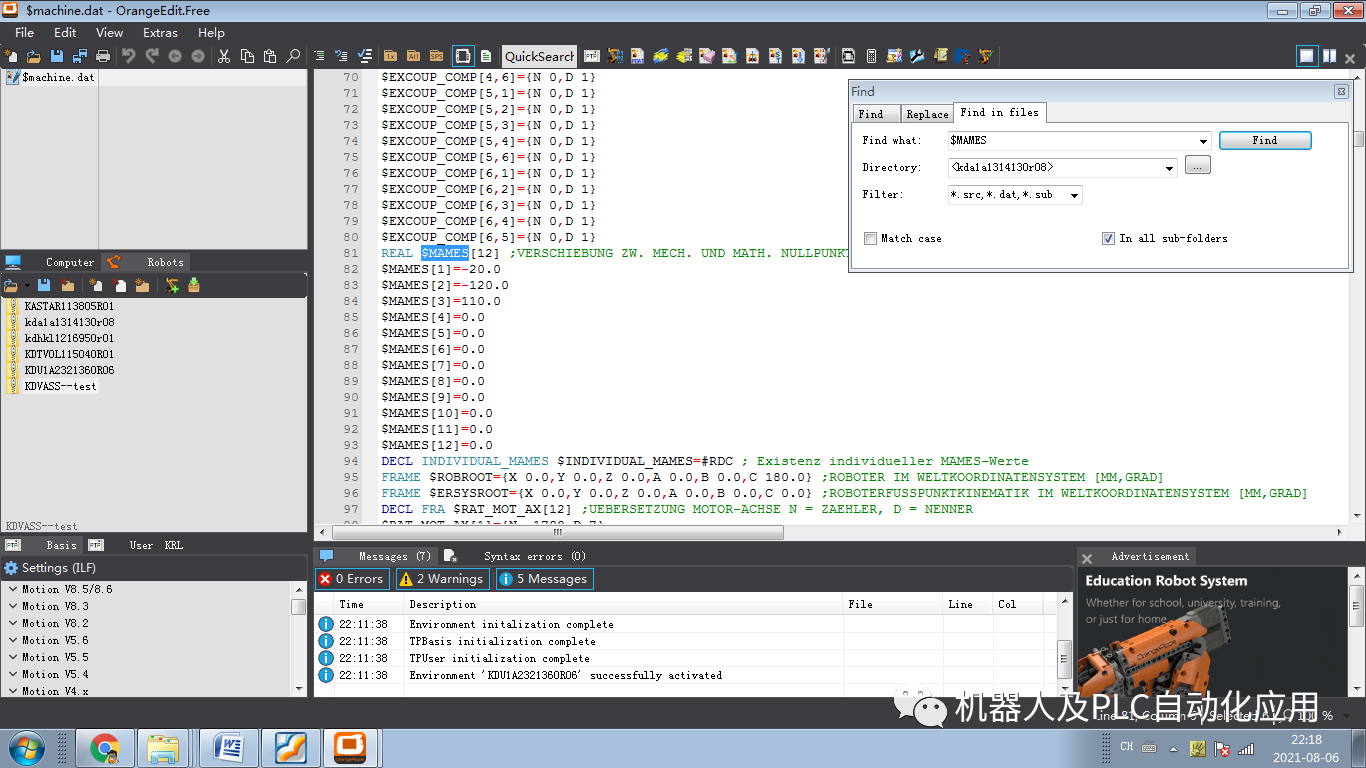
我们更换了机器人,让后在进行零点校正过程中出现了$MAMES_ACT数值丢失的故障
$MAMES[n] 轴n 的机械和数学零点之间的偏移
机器人在进行维护之前将移动至位置 $MAMES。之后,机器人通过参照调整重新被赋予系统变量的轴值。这样,机器人便重新回到调整值丢失之前的状态。
已学习的偏差会保存下来。不需要使用 EMD 或千分表。
在参照调整时,机器人上是否装有负载无关紧要。参照调整也可用于附加轴。
在进行维护之前将机器人移动至位置 $MAMES。为此给 PTP $MAMES 点编程,并移至此点。此操作仅可由专家用户组进行!
$MAMES_ACT[]
机器人专用主控位置
特定机器人类型的每个轴的主控位置通过机床数据中的 $MAMES[ x] 定义(变量在文件 …R1Mada$machine.dat 中)。
机器人特定的控制位置 $MAMES_ACT[ x] 可能会略有偏差。
然后,存储在 $MAMES[x] 中的相对于母版制作位置的偏移量将作为 MAM 文件保存在 RDC 上。
如果要保存并使用用于控制的偏移值,则必须在机床数据中用 $INDI VIDUAL_MAMES(文件 …R1Mada$machine.dat 中的变量)指定。然后机器人控制器在启动期间读取偏移值,将它们添加到 $MAMES[] 值并将结果写入变量 $MAMES_ACT[ x]。
∎ 如果要使用带有偏移数据的 MAM 文件,$INDIVIDUAL_MAMES ≠ #NONE,$MAMES_ACT[x] = $MAMES[ x] + MAM 偏移。
如果使用带有偏移数据的MAM 文件,$INDIVIDUAL_MAMES ≠ #NONE,但没有保存MAM 文件,$MAMES_ACT[x] 无效。
∎ 如果不使用带有偏移数据的 MAM 文件,$INDIVIDUAL_MAMES = #NONE, $MAMES_ACT[x] = $MAMES[ x]。
$MAMES_ACT[ Axis number]=Axis value
例:
A3 的机床数据中的 $MAMES[] 值为 90°。在 MAM 文件中,为该轴保存了 1° 的偏移量:$MAMES_ACT[3] = 90.0 + 1.0 = 91.0
-
机器人
+关注
关注
210文章
28226浏览量
206607 -
电机
+关注
关注
142文章
8939浏览量
145128 -
数值
+关注
关注
0文章
80浏览量
14352
原文标题:今天更换机器人过程中出现了MAM文件数值丢失的故障
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐







 工商网监
工商网监
评论