 教你怎样DIY一个磁悬浮装置
教你怎样DIY一个磁悬浮装置
今天教大家做一个磁悬浮玩具,
1、磁悬浮的基本原理
磁悬浮有下推式和上拉式两种基本形式。
所谓下推式,就是控制部分在底座上,悬浮的磁铁在上面,依靠底座从下往上的排斥磁力推动磁铁悬浮;而上拉式,是控制部分在上面,悬浮的磁铁在下面,依靠控制部分从上方的吸引力吸住磁铁不会落下去。
本文实现的是下推式,仅讲解推式磁悬浮的原理和实现方法。
如下图,是一个环形磁铁的磁力线: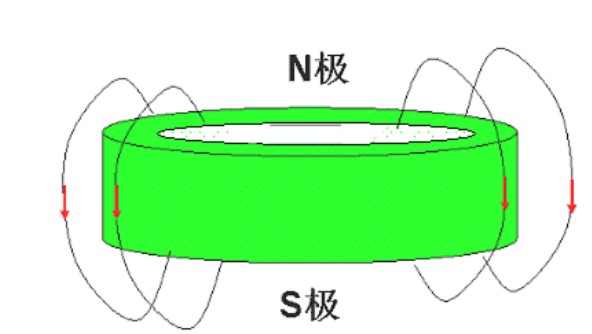
如果在它上方放置另一个小磁铁,N极向下S极向上,那么它会受到下面的环形磁铁的斥力。越靠近下方的环形磁铁,斥力就越大。当距离合适时,斥力与上方磁铁的重力相等时,就能实现悬浮: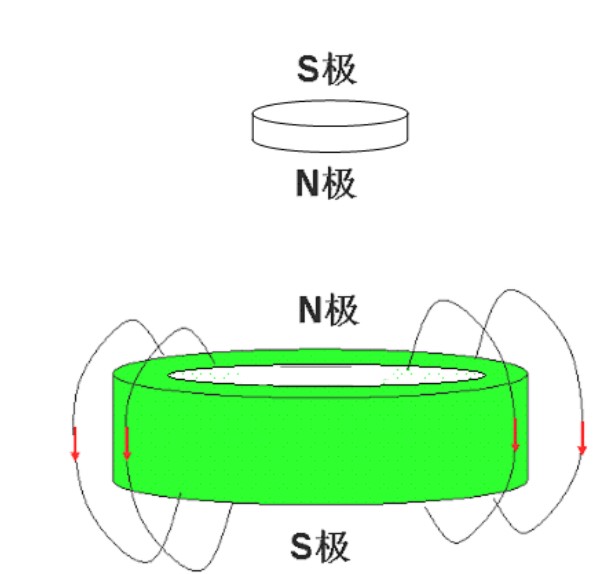
但是,仅仅依靠两个磁铁的相互作用是不能保持稳定的,因为两个磁铁的斥力只要与重力的方向不在同一直线上,就不能保持平衡,上方的小磁铁就会向旁边飞出去。
而下推式磁悬浮的实现方法,就是在上述的系统里,再增加一个控制上方小磁铁保持在中轴线位置的装置。这样,小磁铁即不能往旁边移动,垂直方向的重力又和磁铁斥力相抵消,就能实现稳定的悬浮了。
具体实现时,如果没有大环形磁铁,可以使用一圈小磁铁代替,效果是一样,如本文效果图里用的4个、8个都行,但是一定要排布在对称位置。
控制小磁铁位置的装置,一般由霍尔元件和电磁铁组成。用两个霍尔元器件来检测磁场,两个霍尔元件安装在环形磁铁的中心处,且互相垂直,检测面都与铅垂线平行。如果上方的小磁铁在中轴线上,那么系统的磁力线也是铅垂线方向的,两个霍尔元件都无输出;如果小磁铁偏离了中轴线,那么系统的磁力线方向会偏离铅垂线方向,霍尔元件就能检测出往某个方向偏移了。此时,由MCU采集霍尔元件的输出,控制电磁铁,产生一个水平方向相反的磁力,将小磁铁拉回中轴线上就行了。
由于该系统是一个动态平衡的系统,需要不断地采集、判断、调整,最好使用PID控制。
了解完原理,下面就一起实现吧!
2、硬件电路图及调试
由上述的原理讲解,我们的硬件只需要处理好两件事情就行了:一是采集两个相互垂直安装的霍尔元件的输出,以获取小磁铁的偏移位置;二是控制两组相互垂直的电磁铁,产生水平的磁力。
主要的原理图附在下面,完整的图纸可以关注文末的公众.号,找到下载地址。
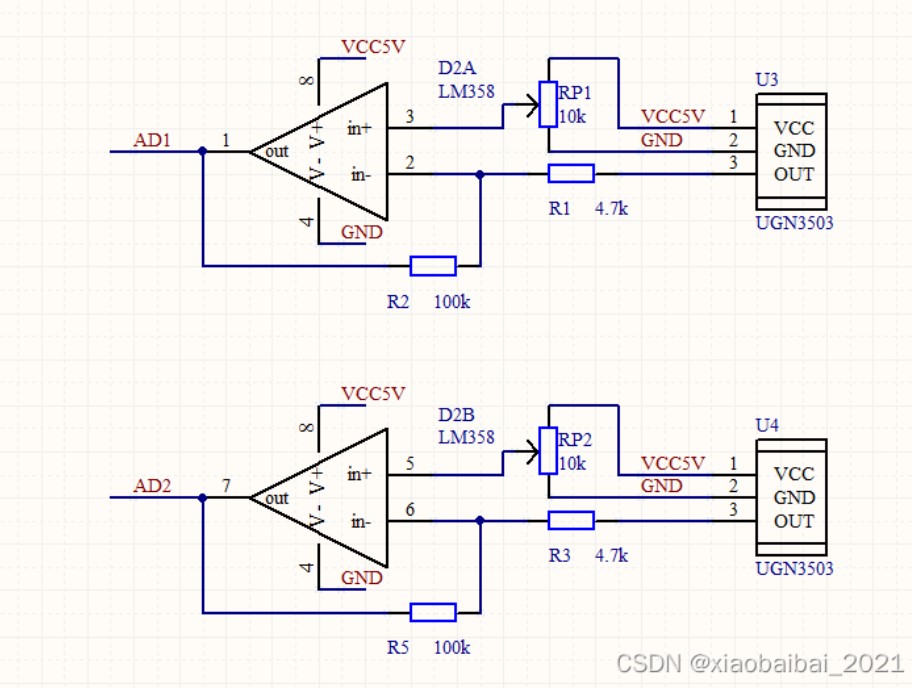
霍尔元件及其信号放大部分,UGN3503是霍尔元器件,电位器提供一个初始的零位电压,霍尔的输出信号通过反向放大后,输出到STM32的AD口采集:
电磁铁驱动部分,使用L293D电机驱动芯片来驱动电磁铁,L293D由STM32输出的PWM波来驱动: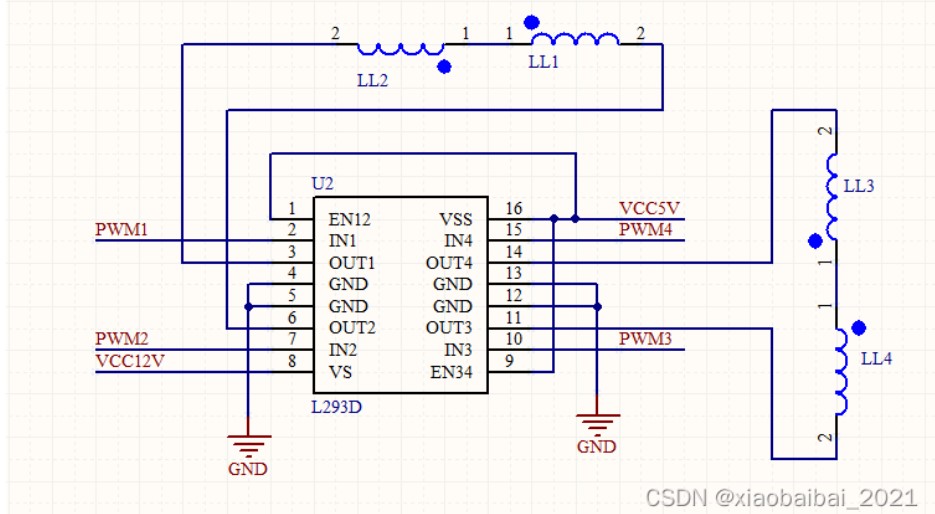
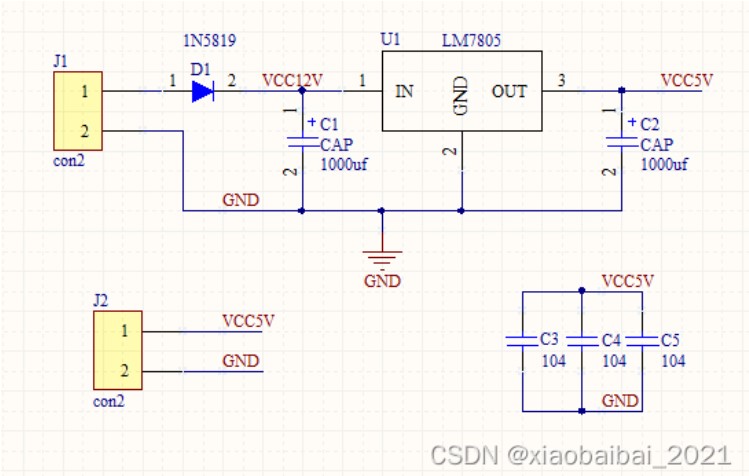
电源部分,驱动电磁铁用9~12V的电压比较合适,霍尔供电用5V:
因为我在DIY的时候STM32是外接的最小系统,所以原理图里没画STM32,只留了几个接点。
注意布局时,霍尔元件和电磁铁的放置位置,有特殊要求。最终的PCB图如下: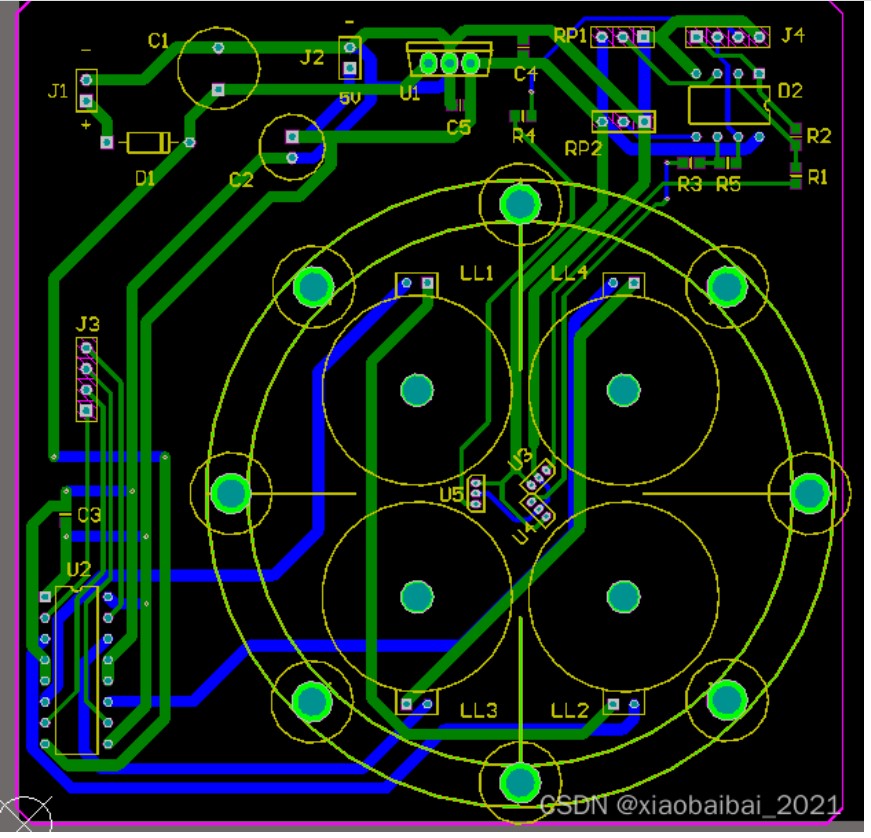
U3和U4是两个检测磁铁位置的霍尔元件,需要安装在环形磁铁中心附近,并且互相垂直;而且霍尔的平面要在相对角电磁铁的连线上。
注意两个霍尔U3和U4的位置:(U5也是个霍尔,本来是预留来检测是否有磁铁放在上面的,暂时没有用上)
LL1~LL4是四个电磁铁,LL1和LL2一组,LL3和LL4一组,安装时,同组的需要对角放置;而且要注意安装时同名端相连,通电后,同组的两个电磁铁磁力线能相互连接产生闭合磁力线(也就是一个上方为N极时同组另一个上方为S极)。这样才能保证同组的电磁铁产生的磁力在水平方向是相同的。
在电路图焊接完成后,与STM32F103C8T6最小系统相连,霍尔的输出AD1、AD2连接到STM32的PA0和PA1;PWM1~4依次连接到STM32的PA15、PB4、PB3、PB5。其他供电部分的连接就不说了。
安装好环形磁铁,上电后,在空载状态下调整U3、U4连接的电位器,使得AD1和AD2都在1.65V左右(也即AD采集时3.3V的中间值)。
到这里,硬件的设计工作就基本完成了。
3、软件编程实现
软件的实现也是大致分为两大功能:一是通过AD采集,获取磁铁再水平方向X、Y轴的位置;二是通过两个方向位置偏移的大小来计算驱动两个方向电磁铁的PWM输出值,这个计算过程使用了PID算法。
程序架构是:在主循环里不断地采集霍尔元件的电压,也就是AD1、AD2的值;在中断里计算PID控制算法,设置PWM的输出。
首先在cubemx里配置ADC,打开AD0、AD1和AD4(实际只用了AD0和AD1,AD4是预留的,采集了但是没有用于计算),分别配置到图中的rank1、rank2、rank3下: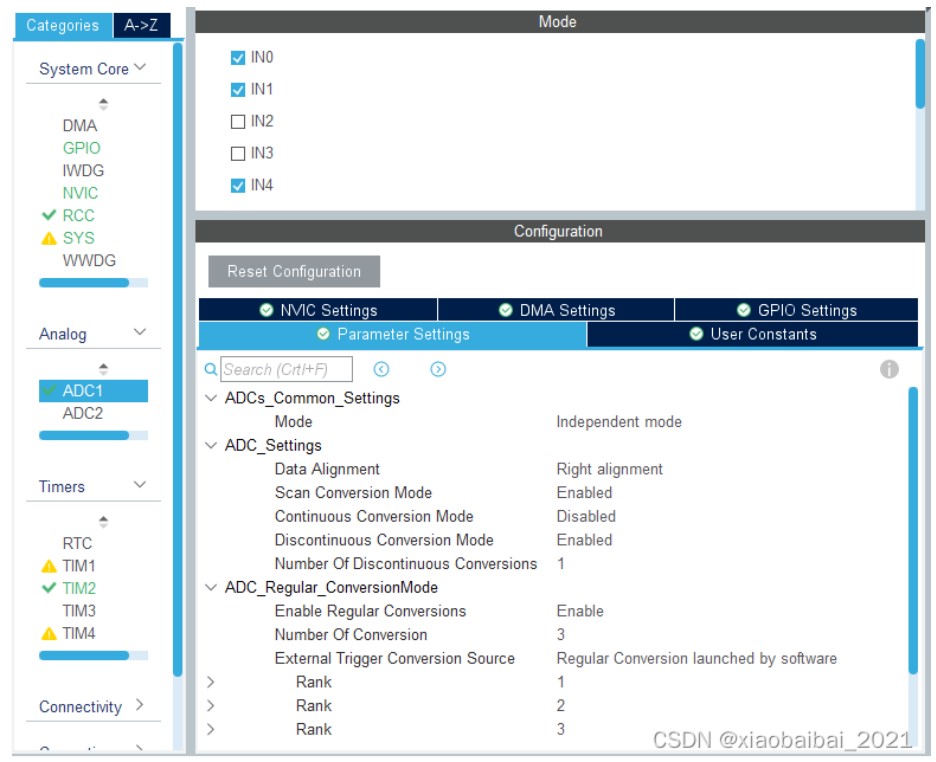
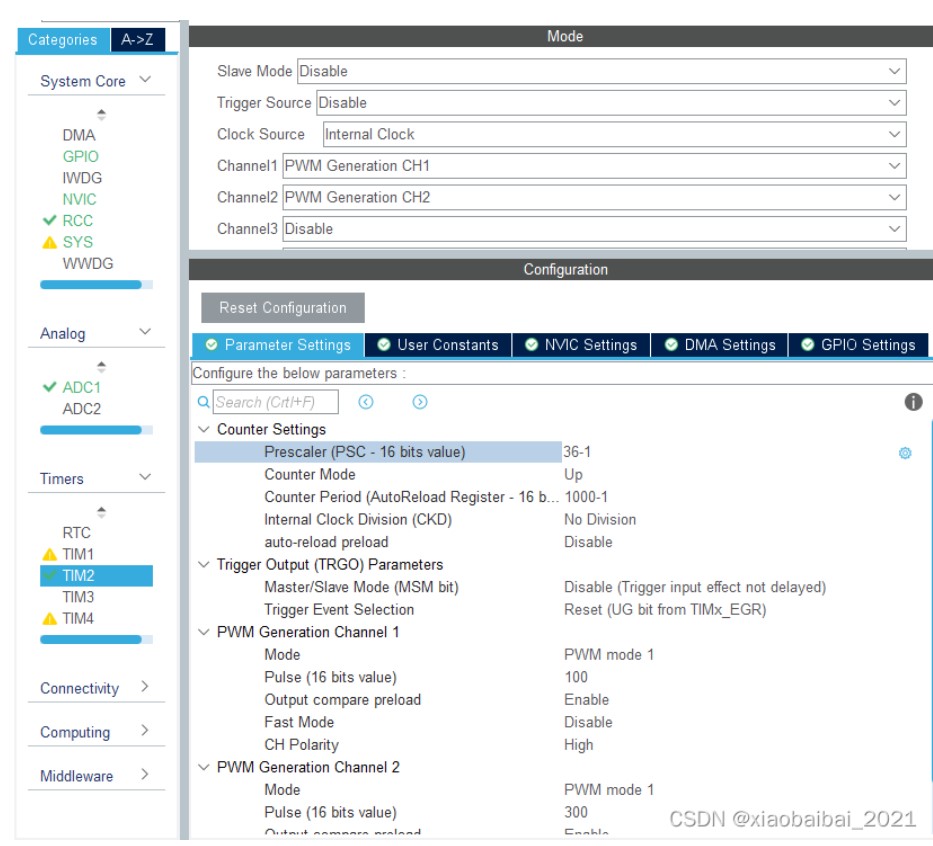
定时器和PWM设置:
定时器分频设置为36,计数到1000时溢出;主频是72M,所以定时器中断是2KHz。
设置CH1和CH2两个通道PWM输出,模式1(先高电平,匹配后拉低,初始值可以设置为任意值,图中的初始值100和300对系统无影响):
设置完成后,PA15和PB3自动被占用为PWM输出引脚。
再手动设置PB4和PB5为输出引脚,这里设置PB4和PB5是为了配合PWM引脚来控制电机驱动芯片来使电磁铁改变正、反向。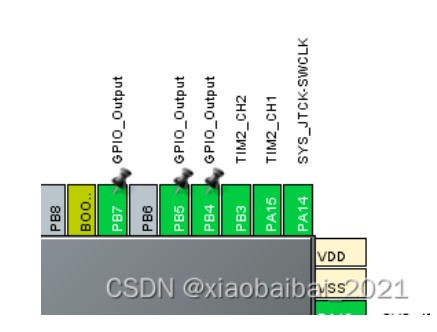
使能定时器TIM2中断: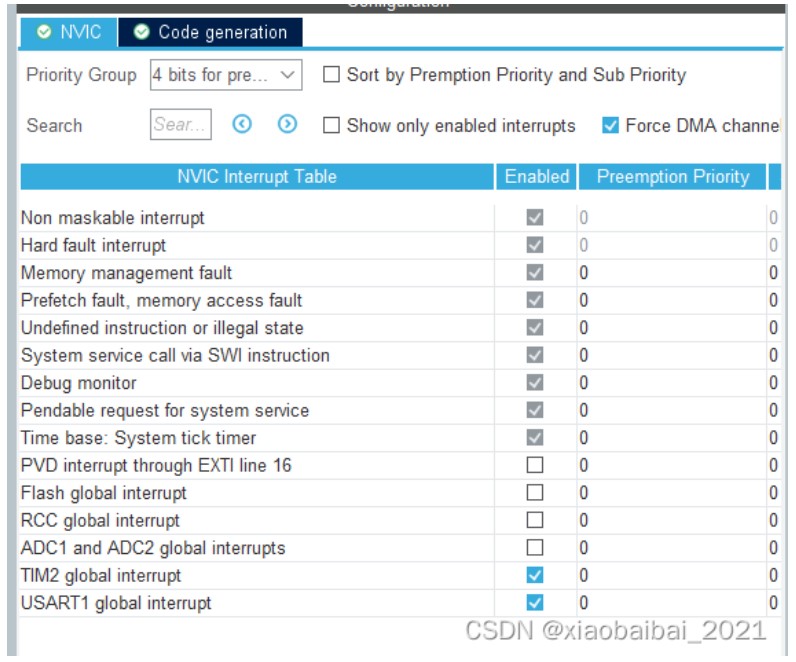
到这里,cubemx里的硬件主要配置就完成了。接下来可以生成keil工程,编写软件代码。
由于整个工程源代码比较长,这里只讲解最核心的部分。完整的代码可以关注文末的公 众号后,找到下载地址。
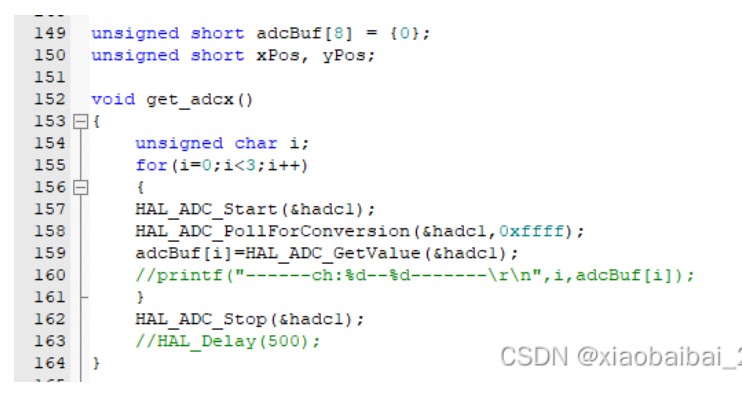
在keil工程里,adc部分,使用如下函数进行AD采集,采集了三个通道,即AD0、AD1、AD4:
然后进行滑动平均滤波,这里最终只保留了AD0和AD1两路,10bit的精度,存放到了xPos和yPos中,作为两个方向的位置值。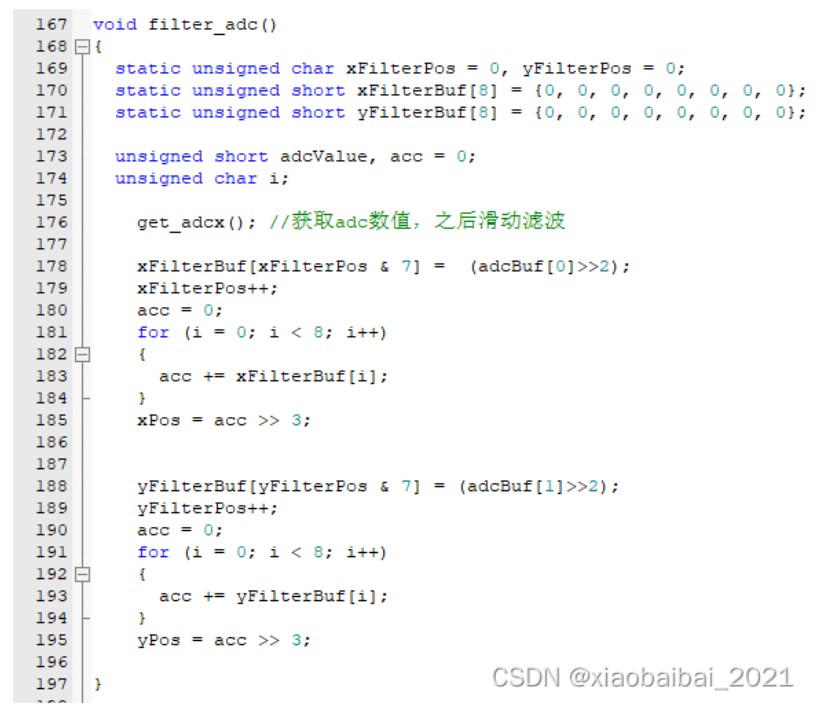
filter_adc()函数需要放在主循环中循环调用,不断更新位置值: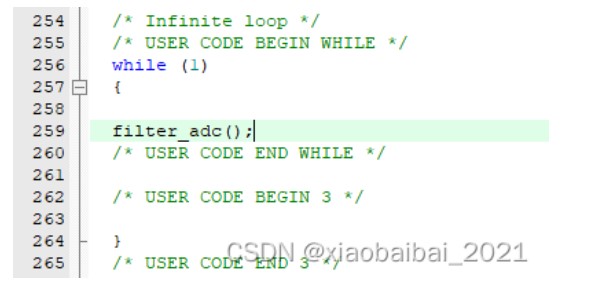
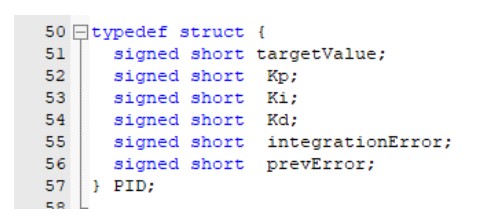
PID部分主要的实现代码如下:
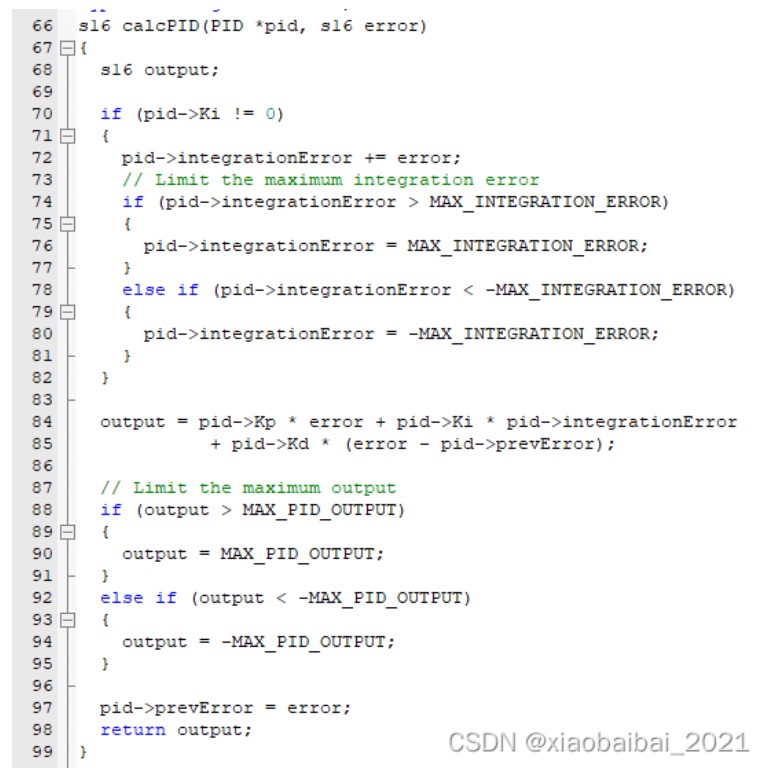
注意,这里PID实现时对积分项的处理,当误差的累加值非常大时(也即积分项很大时)不会再累加误差项,而是限制到一个最大值MAX_INTEGRATION_ERROR,这是一种避免积分饱和的方法。
接下来,讲一下如何设置PWM输出值,以及怎么控制电磁铁磁场的正负向。
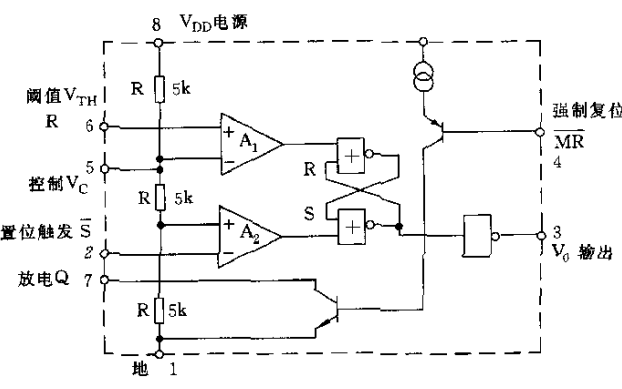
由于我们使用了L293D芯片来驱动电磁铁,以LL1和LL2这一路为例,当PWM2设置为低电平,则PWM1输出为高时就能驱动电磁铁;当PWM2设置为高电平,则PWM1输出为低时,电流与前述状态相反,就能反向驱动电磁铁。如下图所示: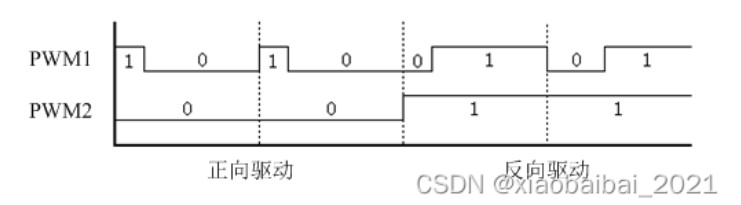
同时,我们只需要改变PWM1的脉宽,就能实现电磁铁的磁场强度控制。
另一路LL3和LL4电磁铁也是一样的原理,可以通过PWM3控制磁场强度,通过PWM4来控制磁场方向。
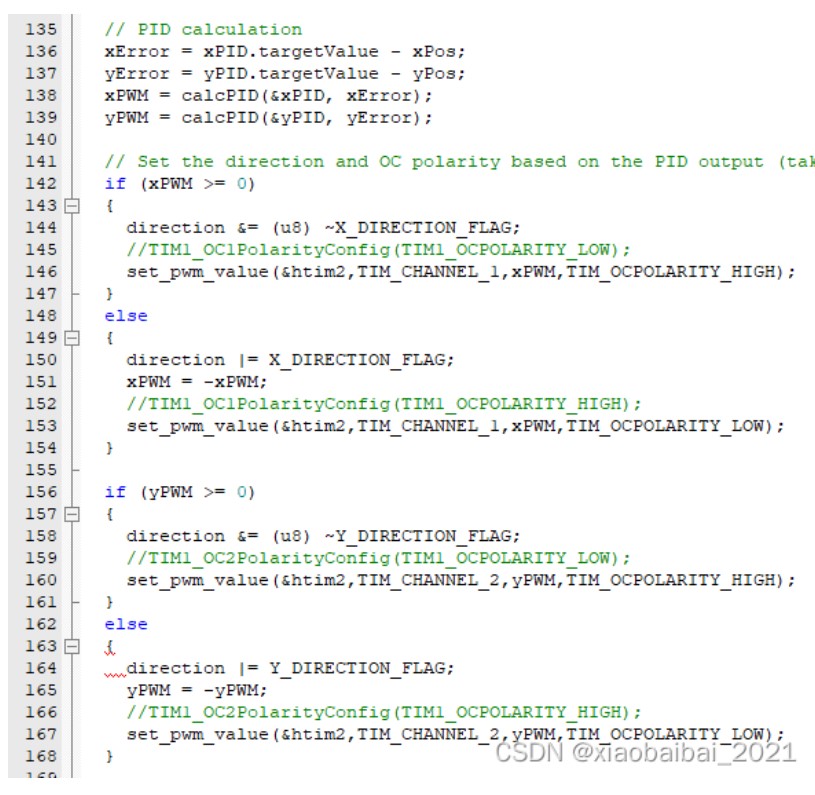
这部分的实现代码如下,其中PWM1和PWM3的输出值(也就是代码中的xPWM和yPWM),是先通过调用PID计算函数得出值,再依据正负向设置到定时器的PWM输出的,整个函数放在定时器中断中调用。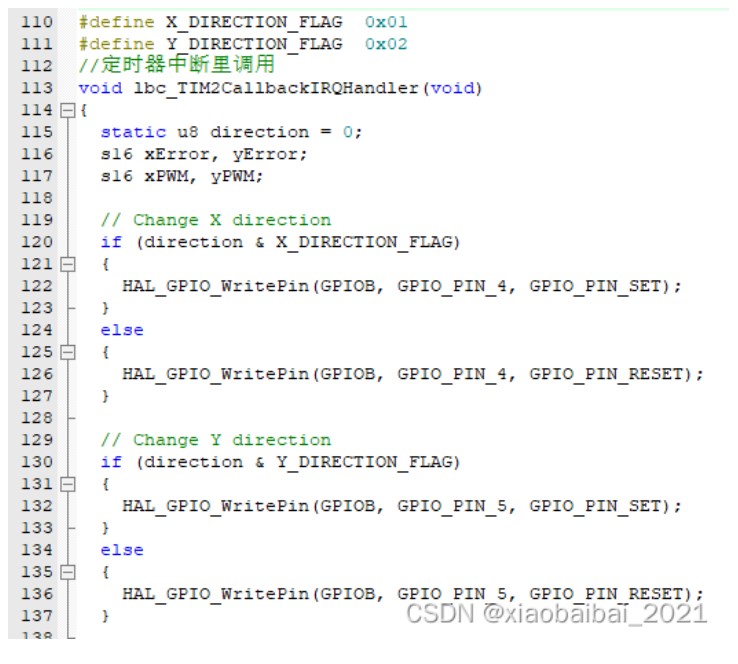
最后提醒一下,PID的参数值,是需要调整的,这些值与磁铁大小、定时器的控制周期长短都是相关的,本文中的取值如下:
#define P_value 4
#define I_value 1
#define D_value 30
4、一些补充内容
在调试时,可以先拿住小磁铁从上往下移动,当感觉重力被磁力抵消时,再向水平的X、Y方向移动,如果感觉有水平的阻力,那么就成功了一大半了,后面只需要微调参数即可。要注意保护强磁铁,如果两个磁铁不加保护直接吸到一起很可能会被撞碎。
到这里,磁悬浮最基本的功能就做好了,但是还有很多可以优化的地方。
比如现在计算周期用的是2KHz,正好在人的听觉范围内,这在使用时,电磁铁可能会产生一些噪音,可以考虑把控制周期改到20KHz以上,但是要注意PID的参数需要调整。
再比如,多利用一个霍尔元件,可以增加检测载荷的功能,如果没有载荷,可以关闭PWM省电。
审核编辑:刘清
-
STM32
+关注
关注
2265文章
10870浏览量
354687 -
PID算法
+关注
关注
2文章
171浏览量
24267 -
磁悬浮
+关注
关注
10文章
99浏览量
19883 -
PWM波
+关注
关注
0文章
99浏览量
16837
原文标题:手把手教你:用STM32与PID算法,DIY一个磁悬浮装置
文章出处:【微信号:gh_c472c2199c88,微信公众号:嵌入式微处理器】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
磁悬浮列车
手工DIY创意磁悬浮陀螺的制作方法图解
STM32下推式磁悬浮装置介绍
如何实现常导和超导磁悬浮演示试验装置的控制论文资料概述
DIY一个电磁悬浮装置





 工商网监
工商网监
评论