 基于线段的激光雷达单目曲面重建
基于线段的激光雷达单目曲面重建

运动结构(SfM)在缺乏合适的视觉特征的环境中往往无法估计出正确的位姿。在这种情况下,最终的三维网格质量(取决于估计的准确性)会降低。解决这个问题的一种方法是将单目相机和激光雷达的数据结合起来。这种方法能够捕捉到环境中精细的细节和纹理,同时仍能准确地表示无特征的对象。然而由于这两种传感器的根本特性不同,融合这两种传感器模式是具有挑战性的。相比直接融合图像特征和雷达数据点,本文提出借助在雷达扫描和图像数据中检测出共同的几何特征,以此在更高级别的空间中处理来自两个传感器的数据。特别是在用BA优化位姿之前,找到雷达扫描提取的三维线束与图像中检测到的二维线束之间的对应关系。作者还利用检测出和优化的线段来提高最终网格的质量,并在最新的公开数据集上测试了该方法,将三维网格的完整性和准确性与使用测量级3d扫描仪得到的真值进行比较。结果表明,该方法的所得到的结果与最先进的激光雷达测量相差无几,并不需要高精度的真值位姿估计。 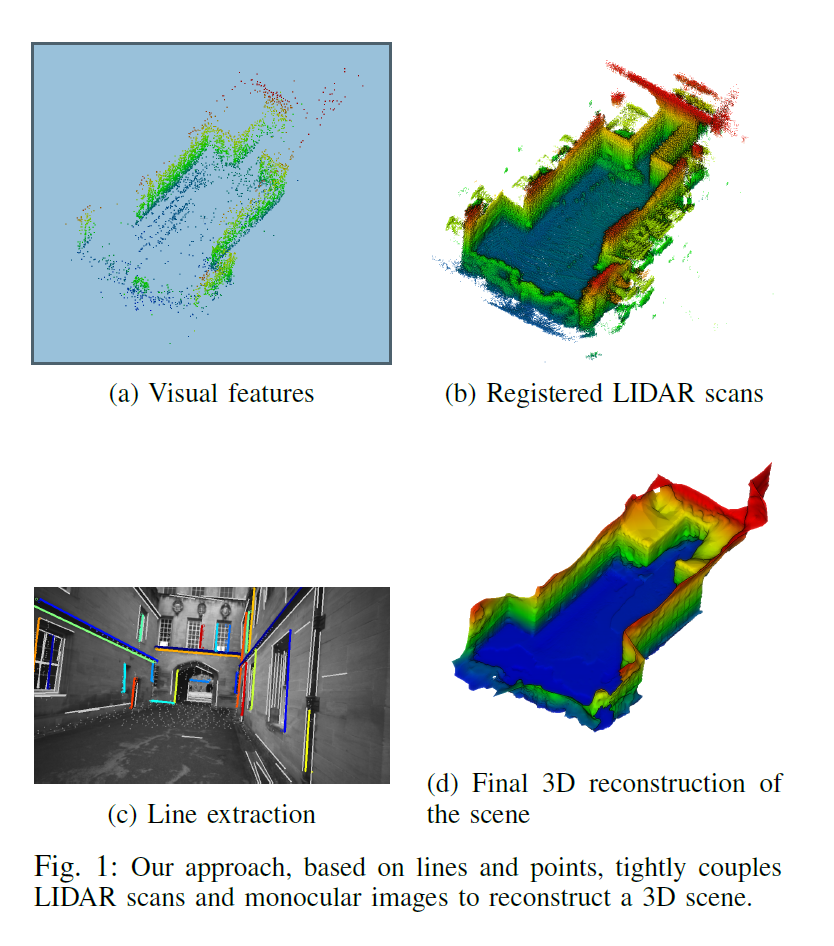 图1所示为基于点线特征将雷达扫描数据和单目图像紧密耦合以完成三维场景重建的方法
图1所示为基于点线特征将雷达扫描数据和单目图像紧密耦合以完成三维场景重建的方法 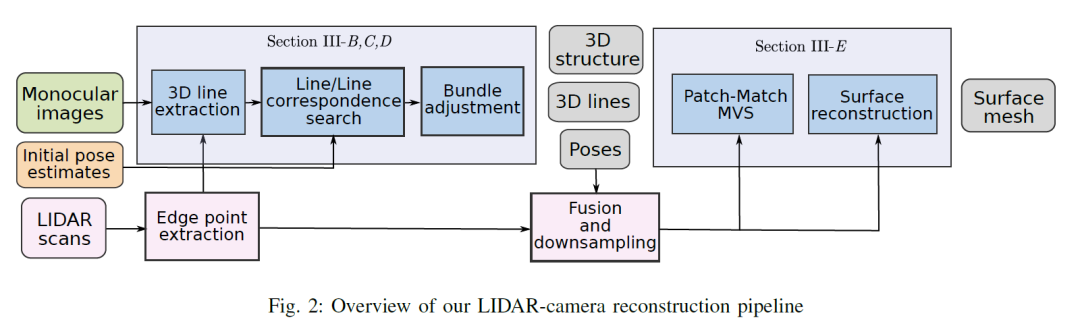 图2:该方法的流程概述
图2:该方法的流程概述 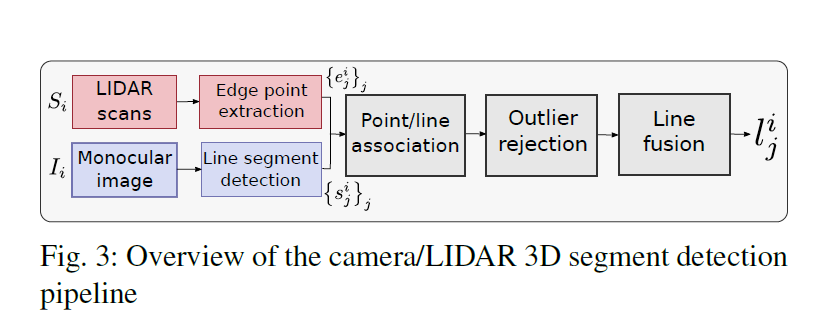 图3:雷达和相机3维线段检测流程概述。
图3:雷达和相机3维线段检测流程概述。 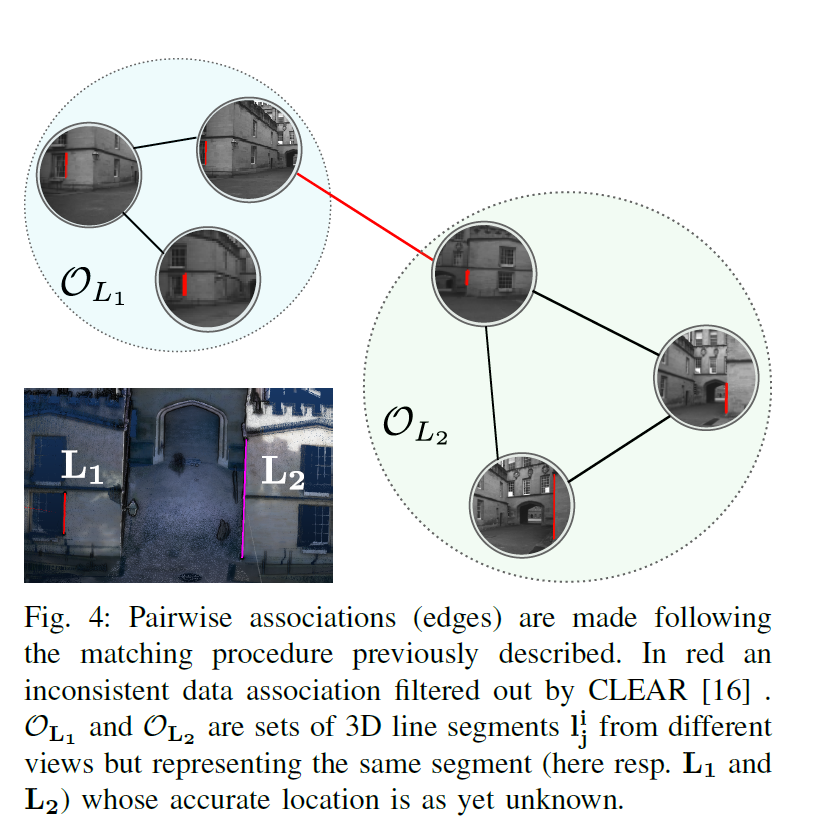 图4:成对关联的边缘是按照文中描述的匹配过程进行的。红色表示过滤掉的不一致关联数据,OL1和Ol2是不同视图的3d线段的集合,但代表的是同一个线段,其准确位置尚不确定。
图4:成对关联的边缘是按照文中描述的匹配过程进行的。红色表示过滤掉的不一致关联数据,OL1和Ol2是不同视图的3d线段的集合,但代表的是同一个线段,其准确位置尚不确定。 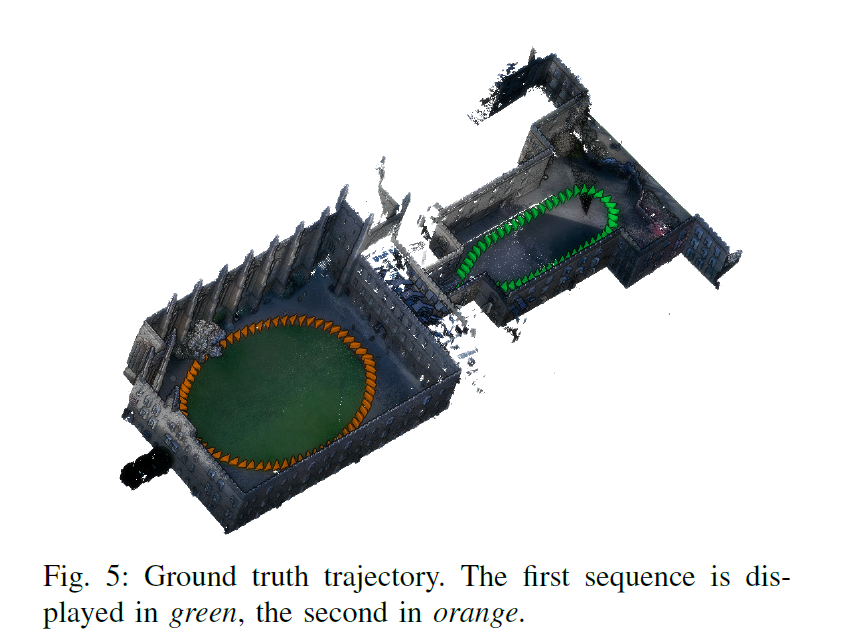 图5:数据真值的轨迹。绿色为第一个序列,橘色为第二个序列数据。
图5:数据真值的轨迹。绿色为第一个序列,橘色为第二个序列数据。 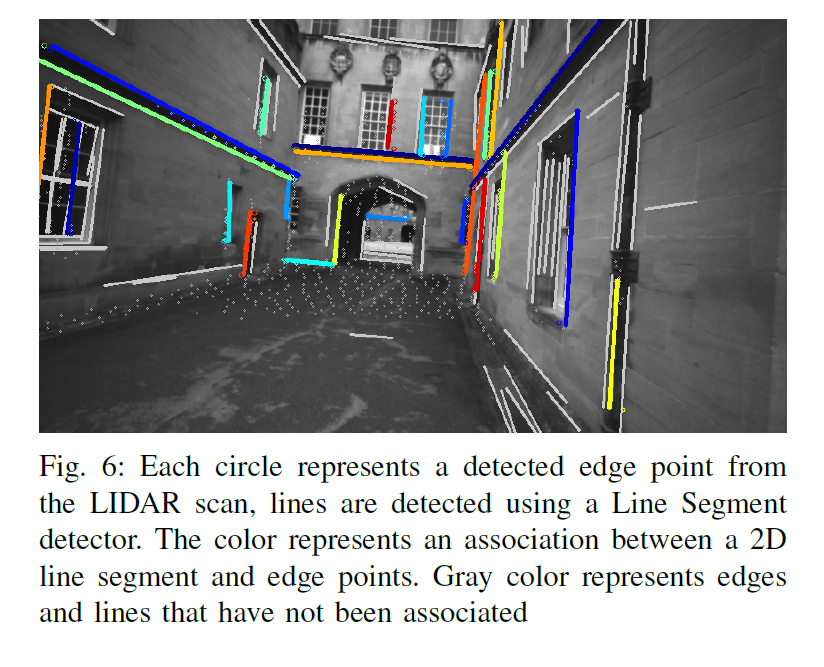 图6:每个圆代表从雷达中检测出的边缘点,线是由线段检测器检测出来的。彩色代表一个二维线段与边缘点之间的关联,灰色代表未关联
图6:每个圆代表从雷达中检测出的边缘点,线是由线段检测器检测出来的。彩色代表一个二维线段与边缘点之间的关联,灰色代表未关联 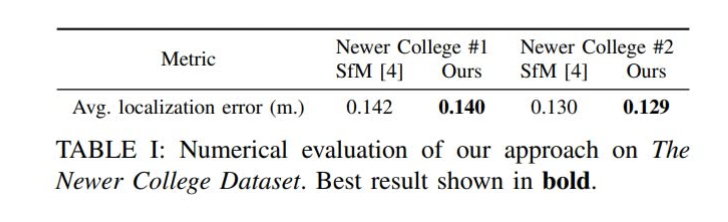 表I 基于Newer College 数据集测试本文方法得到的数值评估结果。最好的结果加粗显示。
表I 基于Newer College 数据集测试本文方法得到的数值评估结果。最好的结果加粗显示。 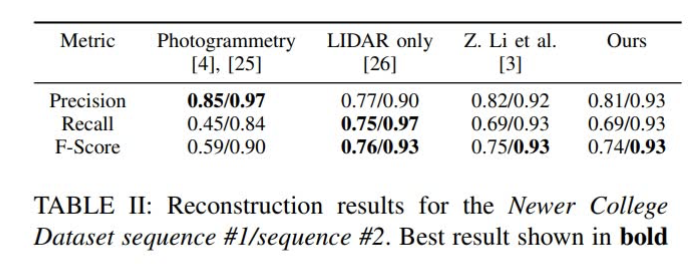 表II 基于Newer College数据集序列1和序列2的重构结果,最好的结果加粗显示。
表II 基于Newer College数据集序列1和序列2的重构结果,最好的结果加粗显示。 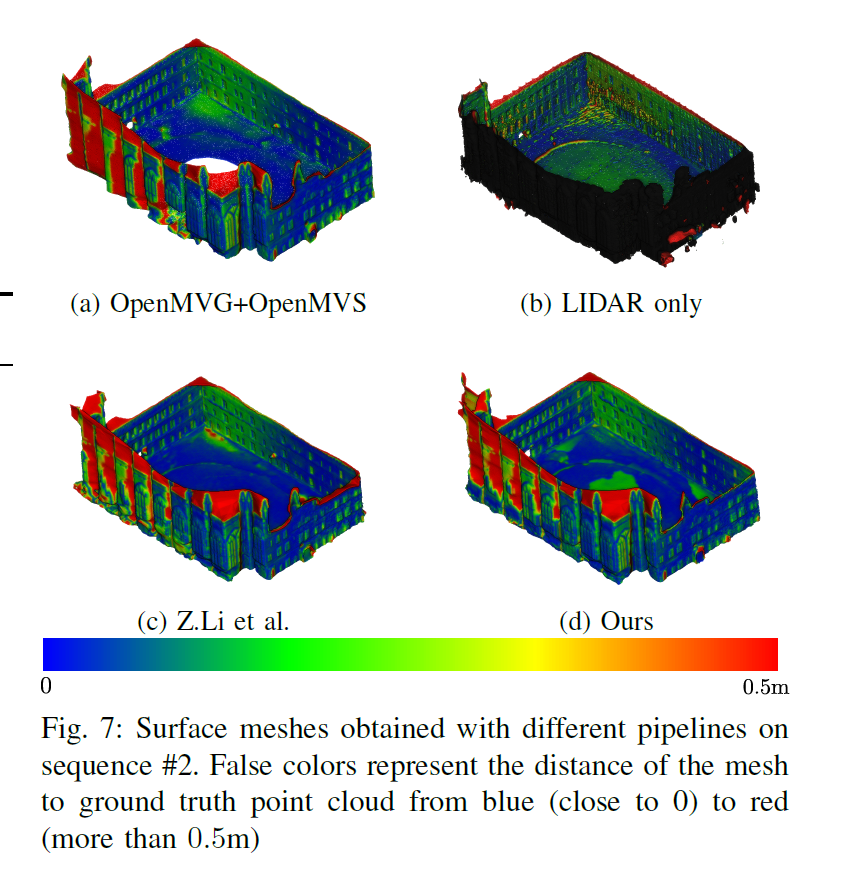 图7:不同方法在序列2上取得的表面重建网格。失真的颜色代表网格到真实点云之间的距离,图示为从蓝色到红色。
图7:不同方法在序列2上取得的表面重建网格。失真的颜色代表网格到真实点云之间的距离,图示为从蓝色到红色。
-
传感器
+关注
关注
2578文章
55567浏览量
794115 -
图像数据
+关注
关注
0文章
54浏览量
11706 -
激光雷达
+关注
关注
982文章
4559浏览量
197135
原文标题:基于线段的激光雷达单目曲面重建(ICRA2021)
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
激光雷达分类以及应用
常见激光雷达种类
激光雷达面临的机遇与挑战
消费级激光雷达的起航
北醒固态设计激光雷达
固态设计激光雷达
机器人和激光雷达都不可或缺
TOF激光雷达
最佳防护——激光雷达与安防监控解决方案
激光雷达知多少:从技术上讲讲未来前景
由iphone12说说激光雷达 FMCW激光雷达 精选资料分享
激光雷达、单目摄像头、双目摄像头原理和优缺点




评论