 一种FLL辅助PLL的GNSS接收机矢量跟踪环路
一种FLL辅助PLL的GNSS接收机矢量跟踪环路

摘要:全球导航卫星系统(GNSS)接收机的设计主要包括捕获、跟踪、解算三个环节,其中,跟踪环节中载波频率和码频率的稳定性直接影响着导航定位性能。为改善动态环境中载波频率和码频率的波动性,提高定位精度,提出一种频率锁定环路(FLL)辅助相位锁定环路(PLL)的 GNSS 矢量跟踪环路结构。在载波环中,采用二阶 FLL 辅助三阶 PLL 的跟踪方法,通过预测载波相位、载波频率、载波频率率,更新载波相位值并反馈到载波 NCO,实现载波稳定跟踪;在码环中,将解算环节获取的伪距信息反馈到跟踪环节,实时更新各跟踪通道的码频率,实现码环稳定跟踪。实验结果表明,相较于传统的标量跟踪方法,所提出的 FLL 辅助 PLL 的矢量跟踪方法能够在动态环境下输出较小的载波频率和码频率误差,且具有更高的定位精度。相较于其他的环路改进算法,该方法融合了载波改进技术与矢量跟踪技术,且利用真实卫星数据验证了所提方法的定位效果。
0 引 言
全 球 导 航 卫 星 系 统(Global Navigation SatelliteSystem,GNSS)已广泛应用于军事和民用领域,成为最受用户欢迎的导航方法之一。GNSS接收机设计主要包括捕获、跟踪、解算三个环节,跟踪环节逐步精细估计载波频率和码相位值,获取伪距、伪距率信息,在解算环节结合卫星位置解算出接收机位置、速度、时间信息。传统的 GNSS 跟踪环路是借助载波跟踪环路(简称载波环)和码跟踪环路(简称码环)完成的,其中码环实现形式通常表现为延迟锁定环路(DLL),而载波环通常有相位锁定环路(PLL)和频率锁定环路(FLL)两种。然而,动态环境中的 GNSS 环路跟踪存在载波频率和码频率波动问题,大幅度的频率波动会影响跟踪性能,从而直接影响导航定位效果。
GNSS 环路滤波器以比例积分滤波(PIF)为主[1⁃2],其利用载波相位差或载波频率差,结合环路滤波参数及相干积分时间确定当前时刻最佳相位或频率,从而完成环路跟踪。GNSS环路跟踪精度主要受热噪声和动态应力误差两部分因素影响,相较于 PLL,FLL 能更加鲁棒地容忍用户的动态应力,能跟踪信噪比更低的信号,然而,FLL 输出的载波相位测量值不够精确,并且数据解调过程中发生的比特错误率更高[3⁃4]。综合考虑到 PLL 与FLL 优缺点,文献[5]将 FLL 与 PLL 结合起来,以 FLL 辅助 PLL 的方式估计载波频率,经过稳定状态下的功率谱分析、均值及方差比较,结果表明 FLL 辅助 PLL 的环路跟踪方式能在环路噪声与载体动态性之间做出平衡,从而优化环路跟踪性能。但缺点是载体运动参数需要根据接收机所处环境的信噪比、动态应力情况预先调整,这制约了该环路结构在实时场景下的应用。为了充分利用跟踪环节中的环路状态量,更具有普遍适应性的矢量跟踪(Vector Tracking,VT)[6]被提出。
不同于传统的标量跟踪,VT 结构将 GNSS跟踪环节和解算环节紧密相连,利用载波频率差、码相位差,计算伪距差、伪距率差,通过导航滤波更新导航结果,并将导航结果送入跟踪环路,实现所有通道之间的信息共享。矢量跟踪结构自提出以来,经过不断发展,文献[7]以 VT为基础,将载波环输出的多普勒频移信息和码环输出的码相位信息送入导航滤波器进行导航解算,并利用解算环节的伪距信息实时更新码频率,辅助环路跟踪。但其载波环 路 实 现 形 式 仍 然 是 单 一 的 PIF 环 路 ,动 态 环 境 中GNSS 载波相位或频率测量值精度低,易造成环路失锁并影响定位结果。
为改善动态环境中载波频率和码频率的波动问题,提高定位精度,本文提出一种 FLL 辅助 PLL 的 GNSS 矢量跟踪结构。首先确定导航跟踪与导航解算的系统模型,包括 FLL 辅助 PLL 的载波跟踪环路结构设计、矢量码环结构设计和导航解算部分的卡尔曼滤波(KF)状态模型和量测模型。实验结果表明,相较于传统的标量跟踪方法,本文所提出的 FLL 辅助 PLL 的矢量跟踪方法能够在动态环境下输出较小的载波频率和码频率误差,且具有更高的定位精度。
1 标量跟踪结构
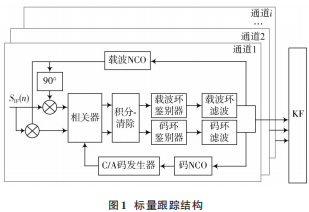
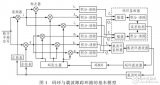
传统的标量跟踪结构如图 1 所示。接收的射频信号经过降频量化后,转化为数字中频信号 SIF ( n )。每个通道的数字中频信号首先与本地载波振荡器复制的载波信号(包括同相支路 I 和反相支路 Q)进行混频,然后与本地码发生器复制的超前(Early)、即时(Prompt)、滞后(Late)码信号进行相关,经积分⁃清除后得到相干积分结果。环路鉴别器根据 6 个相干积分结果可以估算出载波相位差和码相位差,并由环路滤波后作为载波数控振荡器(NCO)和码 NCO 的控制输入。标量跟踪结构的码环为 DLL,载波环为 PLL 或 FLL。如图 1 所示,每个跟踪通道之间相互独立,伪距差、伪距率差被送入导航解算部分,通过 KF实现导航信息解算[8]。
2 矢量跟踪结构
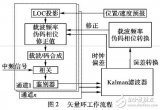
本文提出的FLL辅助PLL的矢量跟踪结构如图2所示。
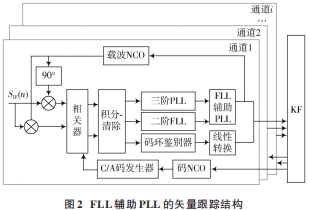
载波环部分通过 FLL 辅助 PLL 的形式更新载波相位值,控制载波 NCO 的输入从而保持环路锁定。其中,PLL 采用三阶环路滤波,FLL 采用二阶环路滤波。码环矢量结构以 KF 为导航处理器,将导航解算部分的伪距信息反馈到码 NCO,调整各跟踪通道的码频率,以此跟踪 GPS 伪码信号并实现所有通道的信息共享。对于导航滤波器,除码环输出的码相位信息外,载波环滤波输出的多普勒频移信息也送入 KF 中,计算接收机位置、速度、时间信息。
2.1 载波环结构设计
载波环结构设计包括三阶 PLL 设计、二阶 FLL 设计和 FLL辅助 PLL设计共三部分。PLL和 FLL设计均采用PIF 形式,分别更新环路状态量,最后通过线性组合获得载波相位值从而控制载波 NCO 输入。
2.1.1 三阶 PLL设计
PLL 是以锁定输入信号载波相位为目标的一种载波环实现方式。基于 PIF 的三阶 PLL 通过预测载波相位、载波角频率和载波角频率率(载波角频率的变化率)实现载波信号的跟踪锁定。
载波相位鉴别器鉴别 k时刻的载波相位差[9⁃10]Δθk:

式中:IP, k 和 QP, k 分别表示 k 时刻即时同相支路和正交支路的相干积分值。
三阶 PLL 结合当前时刻的状态量 xk,计算下一时刻的状态量[1]xk + 1:
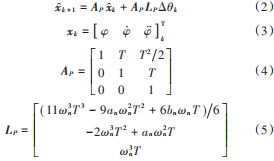
式中:xk 表示环路状态量,它包括载波相位 φ、载波角频率 φ̇ 和载波角频率率 φ;T 为相邻时刻时间间隔;ωn 为环路特征频率;an , bn为滤波参数。
2.1.2 二阶 FLL设计
FLL 是以锁定输入信号载波频率为目标的一种载波环实现方式。基于 PIF 的二阶 FLL 通过预测载波频率和载波频率率(载波频率的变化率)实现载波信号的跟踪锁定。
载波频率鉴别器鉴别 k - 1 和 k 两相邻时刻的角频率差 Δϖk:

二阶 FLL 结合当前时刻的状态量 xk,计算下一时刻的状态量[1]xk + 1:
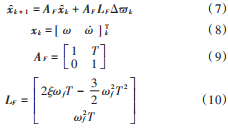
式中:xk 表示环路状态量,它包括载波角频率 ω 和载波角频率率ω;ωf为环路特征频率;ξ为阻尼系数。
2.1.3 FLL
辅助PLL设计k时刻三阶 PLL参与反馈到载波 NCO 的值[11]为:

k时刻二阶 FLL参与反馈到载波 NCO 的值[12]为:

通过线性组合,得到最终反馈到载波 NCO 的载波相位 θNCO, k为:

通过更新的载波相位值,反馈到载波 NCO 复制出本地载波信号,与输入信号混频实现载波稳定跟踪。
2.2矢量跟踪环设计
码相位鉴别器鉴别接收码和复制码之间的码相位差[13⁃14]Δτk:

式中:
码相位差 Δτk经线性转换得到伪距误差 Δρ:

式中:fcode为卫星信号被发射时的码频率,其值为1.023MHz。
利用KF 计算当前时刻接收机的位置pr, k、接收机钟差Δb,结合星历解算出的卫星位置ps、卫星时钟钟差Δbs、电离层延时I、对流层延时 T、伪距量测噪声量ερ,计算当前时刻的伪距值:

计算 k时刻的码频率 fcode, k值[7]:

通过更新的码频率反馈到码 NCO,调整各跟踪通道的码频率实现所有通道的信息共享。
2.3导航解算
为了计算接收机的位置、速度、时间信息,并对跟踪过程与解算过程建立联系,选取KF作为导航滤波器。KF包括状态模型和量测模型两部分,具体理论如下。
KF状态量为:
状态模型为:
状态转移矩阵 Φ 为:
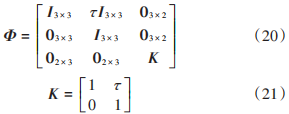
式中 τ为 KF更新时间间隔。
量测量由跟踪环路测得的伪距误差 Δρ、伪距率误差 Δρ̇ 构成。

KF的量测模型为:

其中:
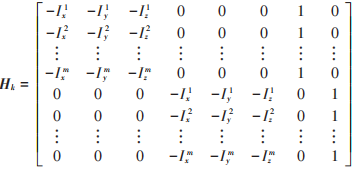
式中:1, 2,⋯, m 表示参与定位的卫星代号;[ I x ,I y ,Iz ]是卫星在接收机处的单位观测矢量。
3 实验和结果分析
3.1 实验数据采集
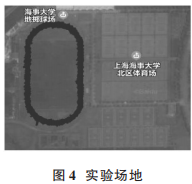
为了验证所提出的 FLL 辅助 PLL 的矢量跟踪结构相较于传统的标量跟踪结构有更好的跟踪性能和定位性能,本文进行了动态实验验证。在本实验中,中频信号 采 集 器 采 集 GPS 的 L1 波 段 信 号 并 转 换 为 频 率 为3.996 MHz的中频信号,采样频率为 16.369 MHz。实验装置如图 3 所示,天线设备安装在电瓶车车筐顶端,电源和中频信号采集器在车筐内。实验在上海海事大学掷球场跑道进行,实验时长为 150 s,实验场地如图4所示。

3.2 实验结果分析
根据所提出的 FLL 辅助 PLL 的矢量跟踪环路结果进行实验数据处理,分别对卫星信号的载波频率、码频率和定位结果三个参量进行对比分析。
图 5和图 6给出了环路跟踪的载波频率和码频率对比结果,灰色点代表传统的标量跟踪结果,黑色点代表本文提出的 FLL辅助 PLL的矢量跟踪结果。
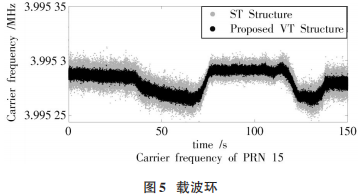
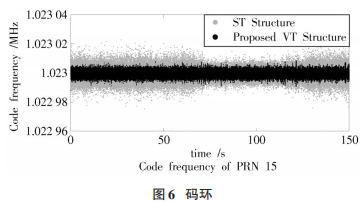
载波频率标准差分别为 10.663 1 m,9.632 3 m;码频率标准差分别为4.011 1 m,1.8326m。从图5、图 6中可以看出,动态环境下所提出的FLL辅助PLL 的矢量跟踪方法相较于传统标量跟踪方法具有更高的跟踪精度,GNSS 跟踪环路输出的载波频率和码频率波动性明显更小。载波环精度提高是因为 FLL 辅助 PLL 的载波跟踪方式可以更稳定地跟踪载波信号。码环精度提高是因为矢量跟踪结构的码频率是通过导航解算部分的伪距信息预测的,相较于传统的标量跟踪精度更高。标准差计算公式为:

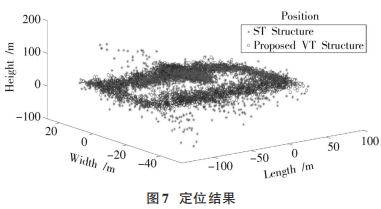
图 7 对比了两种方法的定位结果,星形标号代表传统的标量跟踪方法输出的定位结果,小圆圈代表本文提出的 FLL 辅助 PLL 的矢量跟踪方法输出的定位结果。运动过程中,前者的球概率误差(SEP)为 51.637 3 m,后者的 SEP 为 3.372 6 m。从图 7中可以看出,使用传统的标量跟踪方法解算出的定位结果较为分散,定位结果甚至分布在掷球场中央,部分结果的高度也不正确,而采用 FLL辅助 PLL的矢量跟踪方法所得的定位结果轨迹效果明显更好,定位精度更高。SEP计算公式为:

式中:σx 为东向标准差;σy 为北向标准差;σz 为天向标准差。
4 结 论
本文提出了一种 FLL 辅助 PLL 的矢量跟踪方法,并通过实验验证了该方法的跟踪及定位性能。分别对所提出方法与传统方法的载波跟踪频率、码频率、定位结果三个参量进行对比分析。实验结果表明,相较于传统的标量跟踪方法,本文提出的 FLL 辅助 PLL 的矢量跟踪方法能够在动态环境下输出较小的载波频率和码频率误差,且具有更高的定位精度。
审核编辑:汤梓红
-
接收机
+关注
关注
9文章
1250浏览量
56504 -
pll
+关注
关注
6文章
992浏览量
138467 -
GNSS
+关注
关注
9文章
1032浏览量
51480 -
导航卫星系统
+关注
关注
0文章
10浏览量
3128
原文标题:论文速览 | 一种 FLL 辅助 PLL 的 GNSS接收机矢量跟踪环路
文章出处:【微信号:现代电子技术,微信公众号:现代电子技术】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
基于数字基带芯片的高灵敏度接收机跟踪环路设计
GPS软件接收机跟踪环路设计
基于SoC的星载微型GNSS接收机设计
码环与载波环路鉴相、鉴频原理
一种基于FPGA的时钟跟踪环路的设计与实现

针对GPS接收机中载波跟踪环路的设计与研究
GNSS接收机维护保养方法


大坝安全监测GNSS接收机:保障水库安全




评论