 电机控制上的刷通
电机控制上的刷通
大功率电动运动控制的最新进展以及将混合动力电动驱动引入战斗车辆可以说应该在战鬥機的反应速度,减少工作量,可靠性和显着功率密度的10项技術中名列前茅。
地面战车中的嵌入式技术通常被认为是传感器和武器以及直接协助指挥官和机组人员完成任务的命令,控制和通信子系统。然而,除了这些备受瞩目的计算密集型技术之外,现代战车是一种非常复杂的机器,具有大量电机驱动的部件,例如炮塔,枪,舱口,风扇,泵,弹药处理等。大功率电动运动控制的最新进展以及将混合动力电动驱动引入战斗车辆可以说应该在战鬥機的反应速度,减少工作量,可靠性和显着功率密度的10项技術中名列前茅。
当今的大多数战车都使用液压系统来驱动其机械系统。液压系统通常在 3,000 至 5,000 psi 的压力下运行,容易泄漏,难以维修和维护。此外,与未来将要取代它们的最新一代电机驱动子系统相比,液压泵,管道和执行器笨重而笨重。无论要执行的功能是简单的单轴操作(例如关闭舱口)还是更复杂的自动装载机移动序列,所有闭环伺服系统都具有共同的控制要求,以改变扭矩,加速度,速度和位置,以实现其特定功能。这种伺服系统使用控制器/放大器将高压直流(高达610 V)调制到一个或多个电机以产生所需的运动。控制器将具有许多输入,例如模拟,旋转变压器或编码器,以感测位置或速度以闭环。
现代战车具有集成的电子学架构,支持驾驶和控制它们所需的所有功能。基于冗余以太网或 CANbus 架构,总线 vetronics 系统节省了大量必要的离散点对点布线。从外部照明到操纵车辆或旋转炮塔的所有功能都将通过 vetronics 总线作为一系列命令传输到与要执行的功能相邻的远程控制器。与其他车辆功能一样,电机控制器通过电子总线接收其命令。它们通常作为生产线可替换单元(RRU)实现,除了处理后台诊断和本地错误检测外,还具有相当多的智能来执行命令的伺服功能。
控制器有一系列类型,从一个 LRU 控制从一个到多个运动轴。对于自动装填机等复杂设备,通过vetronics总线接收的命令将编排来自许多电机的一系列受控运动,例如,从分配器中选择所需的弹药类型,将其武装起来,将其移动到位,然后将其装载准备射击。为了实现这种复杂程度,一些控制器是可编程的,它们在开发过程中使用建模和仿真工具(如 MATLAB 和 Simulink)创建其特定的功能集。
在地面战车中,这些机械部件通常又大又重,需要大量的动力才能准确安全地移动和定位它们。由于车辆重量和尺寸是如此重要的参数,因此必须根据伺服系统的重量和物理尺寸来权衡移动重型部件的功率需求。控制器是一个关键元件,持续开发的目标是减轻控制器和电机的重量,功率和尺寸。这些努力的成功可以从表1中判断,该表比较了典型电机控制器与传导冷却VMEbus电源模块的物理尺寸和功率输出。
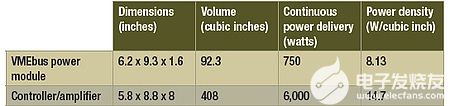
这种功率密度水平超过了传统空气或传导冷却技术的容量,既需要对LRU及其组件进行严格的热设计,也需要采用液体冷却。这种冷却形式用于柯蒂斯-赖特控制嵌入式计算(CWCEC)生产的一系列电机控制器。
对机械运动的精确控制可能不像协作的、联网的命令和控制系统或合成孔径雷达处理器的多个计算节点那样迷人,但电机控制确实将其设计者和技术发挥到了极致。由于紧凑型电机控制器的这种发展,现代战车的尺寸和重量将继续减少。这将使它们成为更有效的平台,携带更多的部队有效载荷,指挥和控制系统,传感器,武器和自我保护系统。
审核编辑:郭婷
-
传感器
+关注
关注
2552文章
51228浏览量
754669 -
控制器
+关注
关注
112文章
16398浏览量
178543 -
电机控制
+关注
关注
3537文章
1882浏览量
268973
发布评论请先 登录
相关推荐
无刷直流电机驱动方案控制板设计以及相关产品应用
有刷直流电机是什么?有刷直流电机的工作原理是什么?

用于驱动无刷和有刷电机的新型 2 A 峰值电流嵌入式电机控制器

无刷电机和有刷电机是什么意思
空心杯电机是有刷还是无刷好
无刷直流电机矢量控制技术详解
永磁无刷直流电机的控制方法
用STM32控制步进电机与无刷直流电机的区别是什么?
基于CW32的无刷直流空心杯电机无感方波控制驱动方案






 工商网监
工商网监
评论