 EM解算器的实际应用
EM解算器的实际应用

在数字电子产品和有线通信的发展中,基于Maxwell方程组的电磁(Electromagnetic,简称EM)解算器被证明是非常有价值的。原因简单明了,电气工程师需要了解当受到动态或变化信号激励时,电路或电气互连的反应。在信号完整性领域,通过直流连接性测试的互连也可能在更高频率下完全失效。在电源完整性领域,即使是测量到正确直流电压的电源轨在施加动态负载时,也可能会进入振荡。应该学会使用EM仿真器这项基本技能,可以在几分钟内获得定性答案,并在几天内获得更高保真的答案,这就是因产品故障而导致夜不能寐的不良设计与具有较大设计裕度的稳健设计之间的区别。
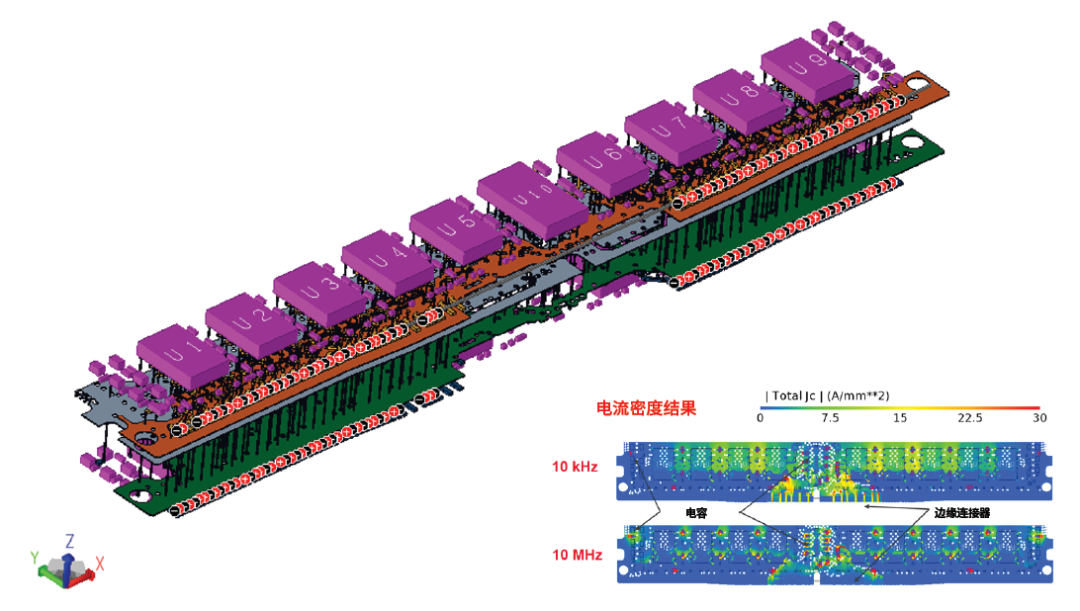
图1: PathWave ADS SIPro和PIPro等3D EM仿真器可以轻松选择网络并自动分配端口,实现快速EM设置及仿真。右图的DDR4 DIMM板EM电流密度结果显示了在10 kHz下,功率由J1边缘连接器传递,但在更高的10 MHz频率下,功率由板载电容传递。
从始至终,EM仿真器一直在寻求精度和速度之间的平衡,以“网格化”三维结构来获得正确答案。在寻找Maxwell方程组的最终解时,无论是在有限元法(finite element methods,简称FEM)的频域中,还是在时域有限差分法(finite difference time domain,简称FDTD)的时域中,用户界面都非常复杂。设置端口、边界条件和网格拓扑可能会给高级用户带来额外的灵活性。对大多数人来说,我们需要自动化来减少重复性任务。
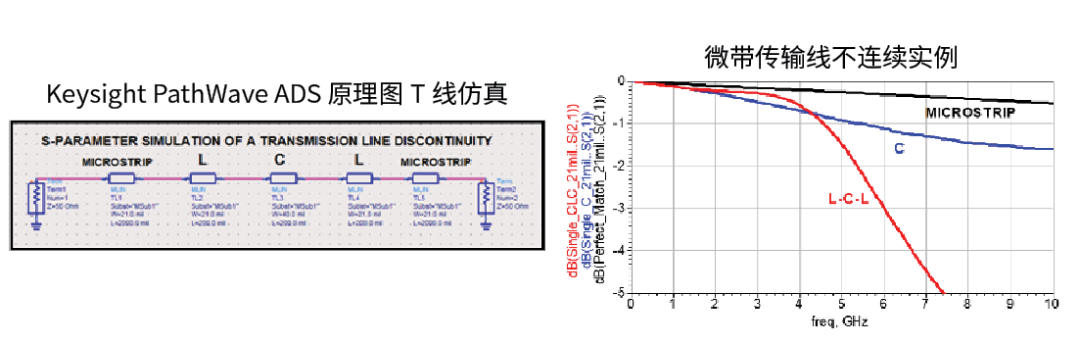
图2:示意图中是算法传输线模型的简单级联,可了解更宽的走线电容不连续性或更窄的走线电感不连续性对高频信号传输所产生的影响。
好消息是现代计算机的处理速度和内存成本低,使得在提高速度的同时更容易保持精度。这增加了对特定应用用户界面进行优化的投资,如模拟多层层压PCB设计。改进的用户界面,如Keysight的PathWave ADS SIPro和PIPro,依赖于强大的EDA PCB CAD数据导入,其中包括堆叠、网络和元件,以便选择网络和实际元件进行仿真。端口可以自动分配,默认网格和边界条件,使用户能够在几分钟内启动并运行EM仿真。
然而,“垃圾输入等于垃圾输出”,以下是确保仿真器适当设置的技巧。
Eric Bogatin的提示:通过将复杂的EM模型转换为简单的传输线级联和集总元件,快速了解预期结果。
Lee Ritchey的提示:通过创建机械测试结构,将走线布到每一层的电路板边缘,以目视检查层与层之间的对准、走线蚀刻宽度和层压层的机械高度,了解最终结果。
我最喜欢的测量领域技巧:测量一些简单的东西,如阶梯阻抗转换(Beatty标准),以验证介质材料的性能,检查机械尺寸与算法模型和测量的关系。
SI及 PI领域的提示:查看时域和频域数据。
最后,将模型投入使用,检查对制造和元件公差的敏感性。
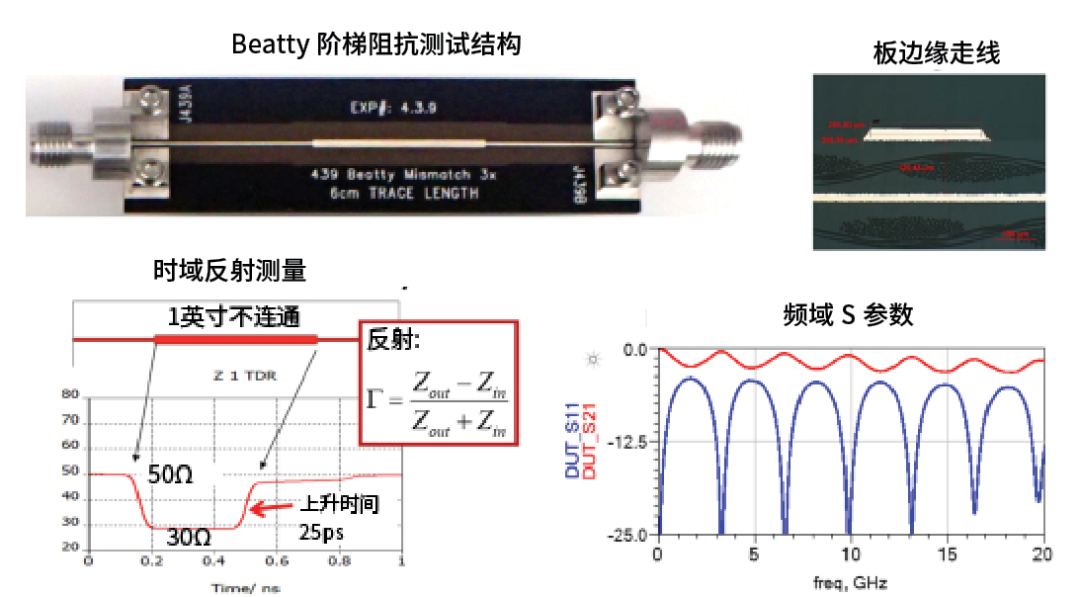
图3:通过左下角图中显示的时域阻抗反射的基本方程,很容易理解左上角的简单阶梯阻抗Beatty测试结构。电路板边缘的走线有助于验证制造的叠层尺寸。右下角是模拟S参数的频域EM,该参数可转换为TDR数据的时域。
用于PCB设计的EM仿真器的速度、准确性和易设置性使得盲目利用数据表及已有设计变得不易被接受。当验证动态操作性能时,工程师需要将EM仿真添加到他们的检查表中。随着电源轨电压不断降低的数千兆位电子产品其密度和速度的增加,简单的直流检查和没有PCB寄生的集总SPICE建模已不足以满足要求。
Heidi Barnes是Keysight Technologies公司高速数字应用高级应用工程师。她拥有5项专利,获得了美国宇航局Snoopy银奖。
审核编辑:汤梓红
-
仿真器
+关注
关注
14文章
1053浏览量
88249 -
Em
+关注
关注
0文章
16浏览量
19621 -
Keysight
+关注
关注
15文章
171浏览量
41324
原文标题:是德科技:EM解算器的实际应用
文章出处:【微信号:actSMTC,微信公众号:actSMTC】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
【CANNON申请】姿态解算
请问姿态解算用什么方法处理更好?
请问MPU6050的软件解算姿态和DMP解算姿态各自的优缺点是什么?
一种基于FPGA的高速导航解算方法设计
使用MPU6050硬件DMP解算姿态
基于MPU6050的四轴硬件姿态解算研究




评论