 S32K144芯片内存映射图与启动流程分析
S32K144芯片内存映射图与启动流程分析

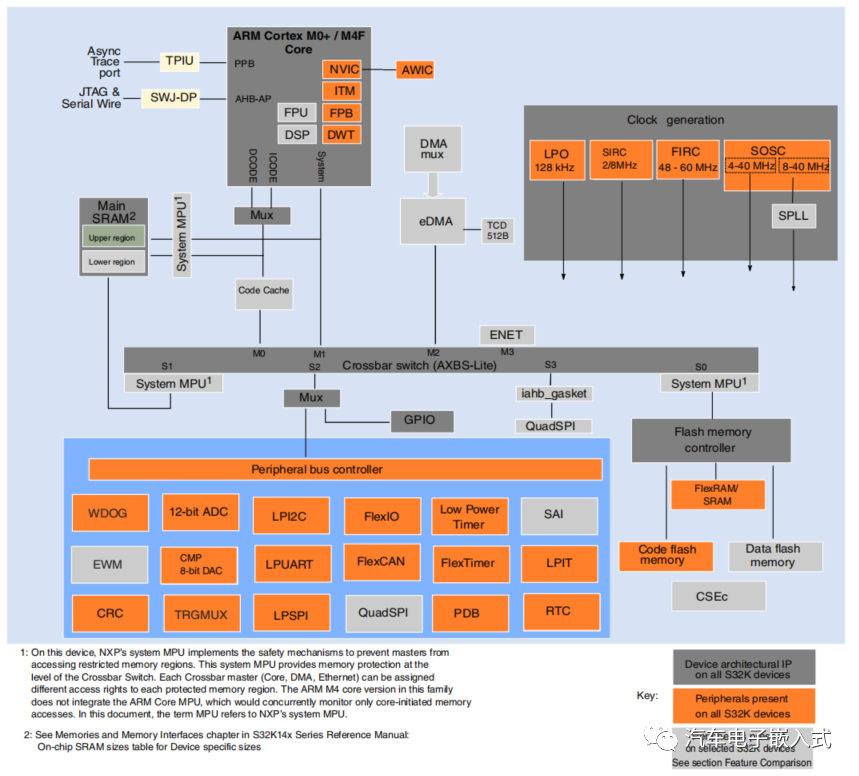
1. S32K144为NXP公司采用ARM内核(cortex-M4)IP和ARMv7-M架构集成的SOC。
2. 内存映射图
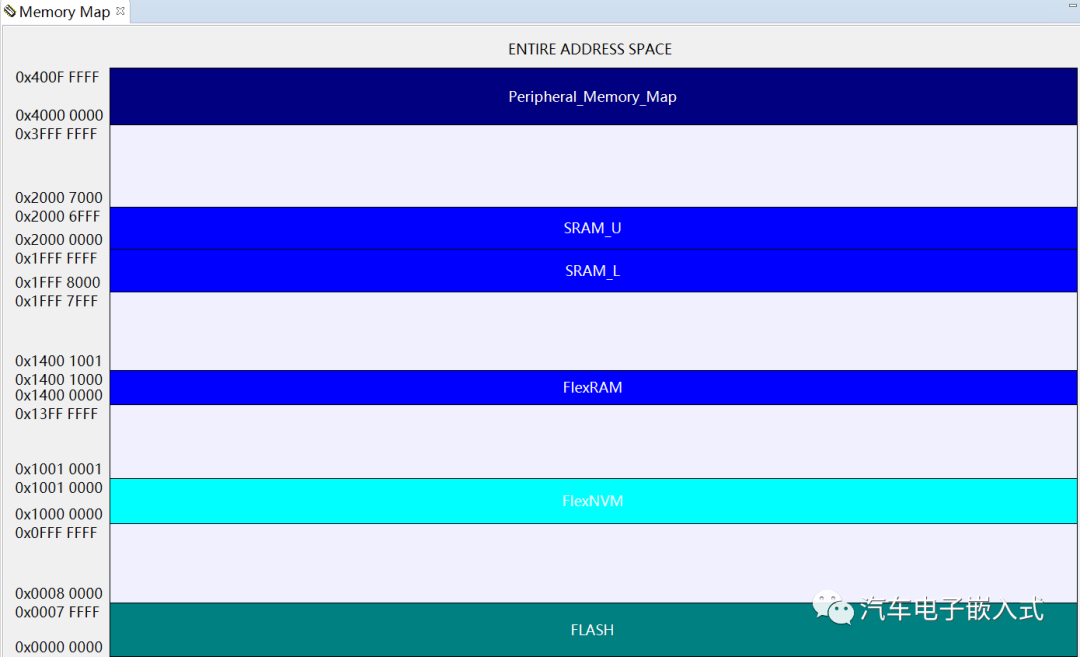
2.1 S32K144芯片内存映射图(memory map)
2.2 Cortex-M4内存映射图
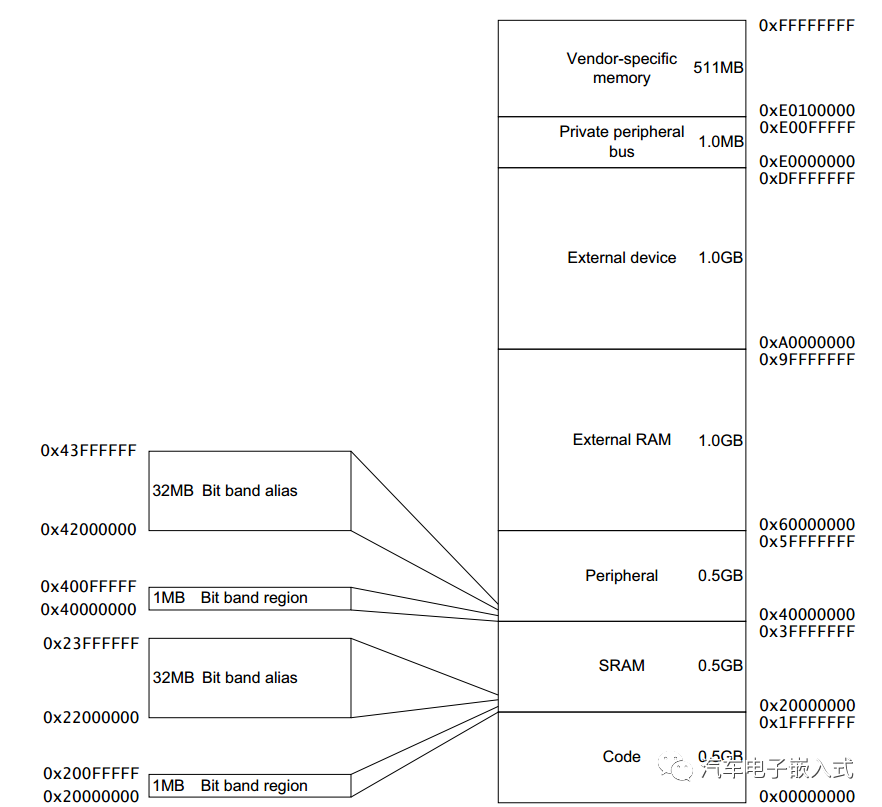
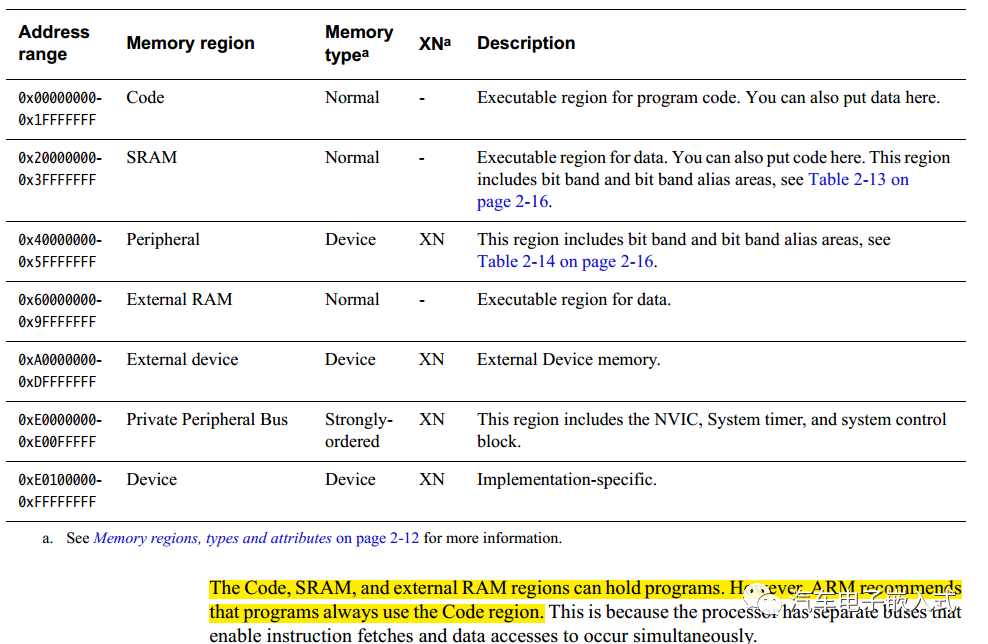
Code,SRAM,RAM区域都能保存程序。ARM系统推荐使用Code段来保存执行程序。
3. 编程模型
3.1) Cortex-M4两种工作模式:
线程模式(Thread Model),应用程序正常执行的时候所在的模式,处理器每次reset重启后进入这个模式;异常处理模式(Handler Model),CPU异常处理的时候进入这个模式,当CPU执行完异常处理程序后会退回到Thread Model。
3.2) Cortex-M4两种特权级:
非特权级状态(Unprivileged),软件限制使用MSR和MRS指令,不能使用CPS指令。不能访问系统定时器,NVIC嵌套向量中断控制器和系统控制块。特权级状态(Privileged),能访问所有资源,使用所有指令。
3.3) Thread模式下,CONTROL寄存器控制软件执行在privileged或者unprivileged状态。unpriveleged 软件执行时可以通过 SVC 指令进行supervisor call进入privilieged software。
3.4) 处理器使用降栈。Thread mode下,CONTROL寄存器控制处理器使用main stack还是进程栈process stack。在Handler模式下,处理器只使用main stack。
3.5) 核寄存器(Core registers)
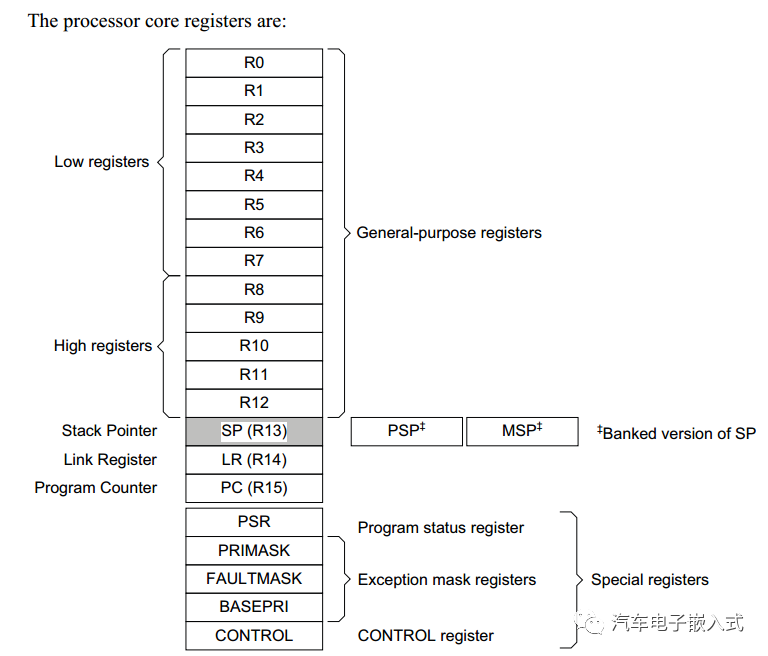
R0-R12为通用寄存器
特殊寄存器:
R13是堆栈寄存器(stack Pointer),在Thread mode下,COTROL寄存器的bit[1]控制stack pointer作为Main Stack Pointer(MSP 这个是reset 值)还是Process Stack Pointer(PSP)
note:reset后,处理器装载0x00000000地址处的四字节值到MSP寄存器。也就是说系统启动的时候,0地址处存放的是MSP寄存器的值。
R14是连接寄存器(Link Register),他存储子程序、函数调用、异常处理程序时的返回信息。reset重启时,处理器设置LR寄存器的默认值为0xFFFFFFFF。
R15是程序计数器(Program Counter PC)。存储当前程序地址。reset重启的时候,处理器装载0x00000004地址处的值到PC指针。
程序状态寄存器(Program Status Register),包括应用程序状态寄存器(Application Program Status Register APSR)、中断程序状态寄存器(IPSR)、异常程序状态寄存器(EPSR)。
4. startup_S32K144.S源代码分析:
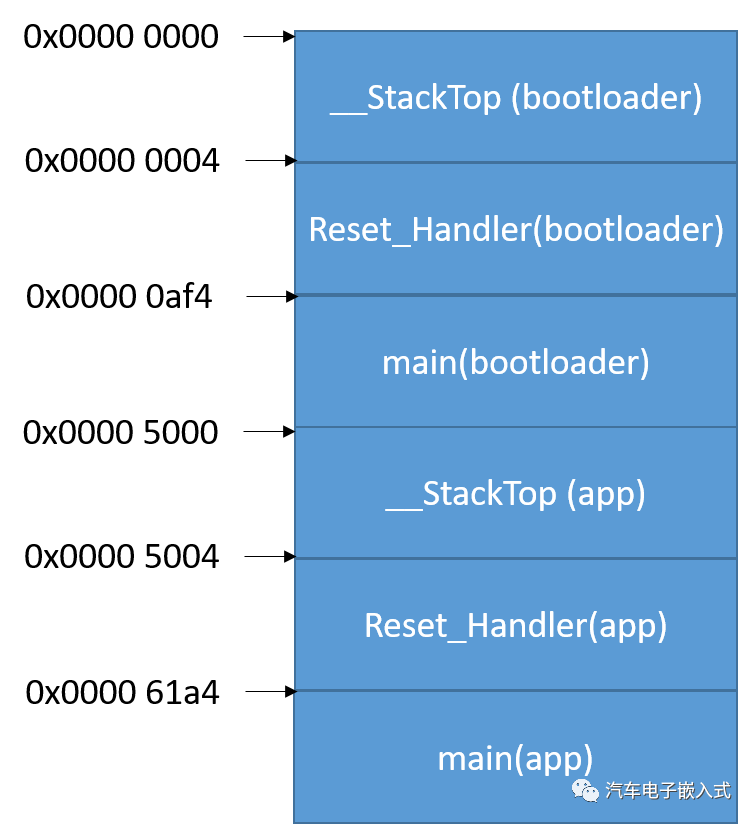
4.1 上电启动
根据上面的分析,reset后处理器从0x00000000地址处取四字节值到MSP寄存器,也就是取 __StackTop标号的值到MSP寄存器。然后处理器装载0x00000004地址处的值(Reset_Handler标号代表的值)到PC指针,也就是程序跳转到Reset_Handler标号处开始运行。
__isr_vector:
.long __StackTop /* Top of Stack */
.long Reset_Handler /* Reset Handler */
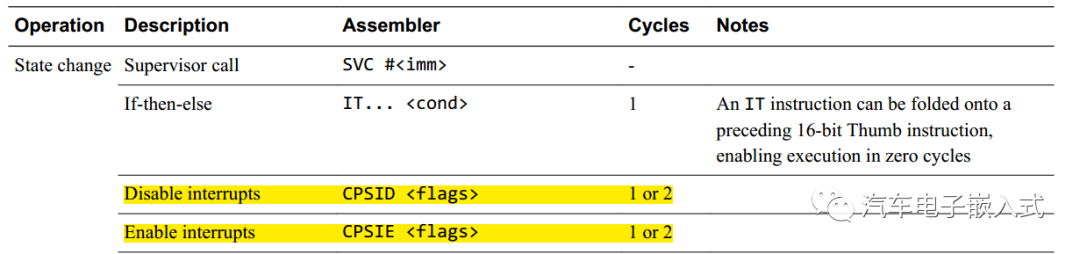
4.2 关闭CPU全局中断
通过汇编指令“cpsid i”,关闭 CPU 全局中断的目的是避免启动过程中中断的影响;因为此时中断向量表还未建立好,无法响应外设中断
Reset_Handler:
cpsid i /* Mask interrupts */
4.3 清零R1-R12通用寄存器
每次复位后, CPU 内核寄存器的值是随机不确定的,所以需要将其清零。
note 1: 为什么清零r1-r7寄存器用ldr伪指令,而清除r8-r12寄存器是要用mov指令 ?
r1-r7是low registers,r8-r12是hight registers,参考ARMv7-M Architecture手册:
大多数16位指令指令只能访问R0-R7这8个通用寄存器(low registers);只有小部分的指令能访问R8-R15寄存器(high registers)
note2:LDR R,label 和 LDR R,=label的区别
LDR 是ARM中的指令,也是伪指令。当用 LDR r, =imd ;r 为寄存器, imd为立即数LDR 是一条伪指令。编译器会根据 立即数的大小,决定用 ldr 指令或者是mov或mvn指令。当imd能用mov或者mvn操作时,就将它翻译成一条mov或mvn指令。当imd大于mov或mvn能够操作的数时,编译器会将imd存在一个内存单元中,然后再用一条ldr指令加载这个内存单元的的值到寄存器中。
LDR r, label 和 LDR r, =label的区别:
LDR r, =label 会把label表示的值加载到寄存器中,而LDR r, label会把label当做地址,把label指向的地址中的值加载到寄存器中。譬如 label的值是 0x8000, LDR r, =label会将 0x8000加载到寄存器中,而LDR r, label则会将内存0x8000处的值加载到寄存器中。
/* Init the rest of the registers */
ldr r1,=0
ldr r2,=0
ldr r3,=0
ldr r4,=0
ldr r5,=0
ldr r6,=0
ldr r7,=0
mov r8,r7
mov r9,r7
mov r10,r7
mov r11,r7
mov r12,r7
4.4 初始化堆栈
ARM Cortex M 系列 CPU 内核有 MSP 和 PSP 两个 32-bit 的堆栈,由于中断和异常处理时使用 MSP 所以必须在发生中断/异常之前将其初始化,其初始化值来自默认向量表的 0 地址偏移,即 0x0000 地址存放的 4 个字节。
note: __StackTop是S32K144_64_flash.ld链接器脚本中定义标号,也就是0x20007000地址处,在SRAM中
/* Initialize the stack pointer */
ldr r0,=__StackTop
mov r13,r0
/* S32K144_64_flash.ld */
/* Specify the memory areas */
MEMORY
{
/* Flash */
m_interrupts (RX) : ORIGIN = 0x00005000, LENGTH = 0x00000400
m_flash_config (RX) : ORIGIN = 0x00005400, LENGTH = 0x00000010
m_text (RX) : ORIGIN = 0x00005410, LENGTH = 0x0007FBF0
/* SRAM_L */
m_data (RW) : ORIGIN = 0x1FFF8000, LENGTH = 0x00008000
/* SRAM_U */
m_data_2 (RW) : ORIGIN = 0x20000000, LENGTH = 0x00007000
}
//...
/* Initializes stack on the end of block */
__StackTop = ORIGIN(m_data_2) + LENGTH(m_data_2);
__StackLimit = __StackTop - STACK_SIZE;
PROVIDE(__stack = __StackTop);
4.5 系统初始化
在完成了以上堆栈初始化之后, CPU 就可以运行 C 代码了,所以此时通过调用定义在工程 SDK->platform->device->S32K144->startup 目录下的 system_S32K144.c 中的系统初始化函数--SystemInit():根据工程配置完成:1)CPU 内核 FPU 配置和使能(如果创建应用工程时选择浮点数运算使用硬件 FPU)
2)关闭看门狗(默认配置)
3)使能 CPU 内核指令缓冲(I-Cache)等 MCU 硬件平台配置。
#ifndef __NO_SYSTEM_INIT
/* Call the system init routine */
ldr r0,=SystemInit
blx r0
#endif
我们么有选择使用FPU和CPU内核指令缓冲,所以主要介绍关闭看门狗操作:
4.5.1 配置CNT(Watchdog Counter Register)寄存器
往看门狗模块的CNT(Watchdog Counter Register)寄存器写入0xD928C520(FEATURE_WDOG_UNLOCK_VALUE)。为什么要写入这个值?
查看S32芯片手册:
Unlock sequence of writing 0xC520 and then 0xD928 for allowing updates towrite-once configuration bits.
意思就是看门狗的默认配置是lock的,如果要改变看门狗的配置首先需要解锁:往CNT寄存器中写入

0xD928C520,然后再通过CS(Watchdog Control and Status Register)来配置看门狗模块。
4.5.2 配置CS(Watchdog Control and Status Register)
主要配置CS寄存器的四个功能




4.5.3 配置看门狗TOVAL寄存器
TOVAL是一个16位的超时寄存器(65535),也就是说是timeout为65535个时钟周期,到点没有喂狗则产生看门狗复位。
/* system_S32K144.c */ /*FUNCTION********************************************************************** * * Function Name : SystemInit * Description : This function disables the watchdog, enables FPU * and the power mode protection if the corresponding feature macro * is enabled. SystemInit is called from startup_device file. * * Implements : SystemInit_Activity *END**************************************************************************/ void SystemInit(void) { /**************************************************************************/ /* FPU ENABLE*/ /**************************************************************************/ #ifdef ENABLE_FPU /* Enable CP10 and CP11 coprocessors */ S32_SCB->CPACR |= (S32_SCB_CPACR_CP10_MASK | S32_SCB_CPACR_CP11_MASK); #ifdef ERRATA_E6940 /* Disable lazy context save of floating point state by clearing LSPEN bit * Workaround for errata e6940 */ S32_SCB->FPCCR &= ~(S32_SCB_FPCCR_LSPEN_MASK); #endif #endif /* ENABLE_FPU */ /**************************************************************************/ /* WDOG DISABLE*/ /**************************************************************************/ #if (DISABLE_WDOG) /* Write of the WDOG unlock key to CNT register, must be done in order to allow any modifications*/ WDOG->CNT = (uint32_t ) FEATURE_WDOG_UNLOCK_VALUE; /* The dummy read is used in order to make sure that the WDOG registers will be configured only * after the write of the unlock value was completed. */ (void)WDOG->CNT; /* Initial write of WDOG configuration register: * enables support for 32-bit refresh/unlock command write words, * clock select from LPO, update enable, watchdog disabled */ WDOG->CS = (uint32_t ) ( (1UL << WDOG_CS_CMD32EN_SHIFT) | (FEATURE_WDOG_CLK_FROM_LPO << WDOG_CS_CLK_SHIFT) | (0U << WDOG_CS_EN_SHIFT) | (1U << WDOG_CS_UPDATE_SHIFT) ); /* Configure timeout */ WDOG->TOVAL = (uint32_t )0xFFFF; #endif /* (DISABLE_WDOG) */ /**************************************************************************/ /* Power mode protection */ /**************************************************************************/ #ifdef SYSTEM_SMC_PMPROT_VALUE /* Power mode protection initialization */ SMC->PMPROT = SYSTEM_SMC_PMPROT_VALUE; #endif }
4.6 RAM初始化
接下来,启动文件会调用定义在 SDK->platform->devices 目录下 startup.c 中的init_data_bss()函数完成应用工程运行所需的 RAM 初始化。
/* Init .data and .bss sections */
ldr r0,=init_data_bss
blx r0
在 startup.c 中通过申明外部变量(extern)的方式,可以引用定义在工程链接文件中的__DATA_ROM、__DATA_RAM、__DATA_END、__CODE_RAM、__CODE_ROM、__CODE_END、__BSS_START 和__BSS_END 符号,获得工程链接结果中.data 段(有初始化值)、 .bss 段(未初始化和初始化值为 0)的全局变量以及重定向到 RAM 中运行的.code 段代码/函数在 Flash 和RAM 中的起始地址和长度(结束地址-开始地址)。
然后再通过数据指针的方式实现全局变量初始化值和重映射代码从 Flash 到 RAM 中的拷贝以及.bss 段的清零:具体包括:
1)初始化.data 段
2)初始化.code 段
3)初始化.bss 段
4)将中断向量表从 Flash 拷贝到 RAM 中并
5)初始化 CPU 系统中断向量偏移地址,使其指向 RAM 中新的中断向量表(如果编译目标为 debug,编译结果存储在 Flash 中)。
note 1: .code段不是代码段,.code段属于m_data域(RAM)用来存放重映射到RAM中的代码。
note 2: .text段才是代码段,.text段属于m_text域(ROM),存放的就是代码。
note 3: 为什么要将.data .bss 中断向量表拷贝到m_data域(RAM),因为.data中保存的是初始化过后的全局变量/静态局部变量.bss段中保存的是未初始化(初始化为0)的全局变量/静态局部变量,在系统运行的时候是需要改变的,而ROM是只读的,中断向量表同理。
note 4: 代码是不需要改变的,为什么也有部分的代码需要重映射到RAM中执行?-- 因为效率,因为相对于ROM来说,RAM的数据宽度较大,速度较快。
note 5: 怎么将代码重映射到RAM中?
通过上面的分析可知,在 S32K1xx 系列 MCU 的启动过程,会自动将定义在.code 段中的代码/函数从其 Flash 储存地址拷贝到 RAM 中的运行时地址。
只有将用户代码分配到 Flash 中的编译目标,即使用 S32K1xx_xx_flash.ld 链接文件的编译目标才存在代码重映射。若是将应用工程编译结果代码分配到 RAM 的编译目标(使用 S32K1xx_xx_ram.ld 链接文件),其编译的函数/代码本身就是储存在 RAM 中的,所以无需重映射。
将 想 要 重 映 射 的 代 码 / 函 数 通 过 __attribute__((section(".code_ram")))指定到.code_ram 段由于在应用工程链接文件中已经将用户段.code_ram 放置在了.code 段中,所以,我们只需要在 C 代码中,将想要重映射的代码/函数通过__attribute__ ((section(".code_ram")))指定到.code_ram 段即可。比如下面就是将 main()函数指定到.code_ram 段的具体实现:int __attribute__ ((section(".code_ram"))) main(void)。
在 S32DS IDE 应用工程中,一个函数若没有特别指定,其将分配到.text 代码段。
需要注意是关键词-- __attribute__ ((section(".code_ram"))) 添加的位置,每个需要指定的函数都要添加这个关键词,因此,可以将其定义为一个宏比如 CODE_RAM 使用:#define CODE_RAM __attribute__ ((section(".code_ram")))然后,再将 CODE_RAM 放在定义的函数名前即可。
/*startup.c*/
void init_data_bss(void)
{
uint32_t n;
/* Declare pointers for various data sections. These pointers
* are initialized using values pulled in from the linker file */
uint8_t * data_ram;
uint8_t * code_ram;
uint8_t * bss_start;
const uint8_t * data_rom, * data_rom_end;
const uint8_t * code_rom, * code_rom_end;
const uint8_t * bss_end;
/* Addresses for VECTOR_TABLE and VECTOR_RAM come from the linker file */
extern uint32_t __RAM_VECTOR_TABLE_SIZE[];
extern uint32_t __VECTOR_TABLE[];
extern uint32_t __VECTOR_RAM[];
/* Get section information from linker files */
#if defined(__ICCARM__)
/* Data */
data_ram = __section_begin(".data");
data_rom = __section_begin(".data_init");
data_rom_end = __section_end(".data_init");
/* CODE RAM */
#pragma section = "__CODE_ROM"
#pragma section = "__CODE_RAM"
code_ram = __section_begin("__CODE_RAM");
code_rom = __section_begin("__CODE_ROM");
code_rom_end = __section_end("__CODE_ROM");
/* BSS */
bss_start = __section_begin(".bss");
bss_end = __section_end(".bss");
#else
extern uint32_t __DATA_ROM[];
extern uint32_t __DATA_RAM[];
extern uint32_t __DATA_END[];
extern uint32_t __CODE_RAM[];
extern uint32_t __CODE_ROM[];
extern uint32_t __CODE_END[];
extern uint32_t __BSS_START[];
extern uint32_t __BSS_END[];
/* Data */
data_ram = (uint8_t *)__DATA_RAM;
data_rom = (uint8_t *)__DATA_ROM;
data_rom_end = (uint8_t *)__DATA_END;
/* CODE RAM */
code_ram = (uint8_t *)__CODE_RAM;
code_rom = (uint8_t *)__CODE_ROM;
code_rom_end = (uint8_t *)__CODE_END;
/* BSS */
bss_start = (uint8_t *)__BSS_START;
bss_end = (uint8_t *)__BSS_END;
#endif
/* Check if VECTOR_TABLE copy is needed */
if (__VECTOR_RAM != __VECTOR_TABLE)
{
/* Copy the vector table from ROM to RAM */
for (n = 0; n < (((uint32_t)__RAM_VECTOR_TABLE_SIZE)/sizeof(uint32_t)); n++)
{
__VECTOR_RAM[n] = __VECTOR_TABLE[n];
}
/* Point the VTOR to the position of vector table */
S32_SCB->VTOR = (uint32_t)__VECTOR_RAM;
}
else
{
/* Point the VTOR to the position of vector table */
S32_SCB->VTOR = (uint32_t)__VECTOR_TABLE;
}
/* Copy initialized data from ROM to RAM */
while (data_rom_end != data_rom)
{
*data_ram = *data_rom;
data_ram++;
data_rom++;
}
/* Copy functions from ROM to RAM */
while (code_rom_end != code_rom)
{
*code_ram = *code_rom;
code_ram++;
code_rom++;
}
/* Clear the zero-initialized data section */
while(bss_end != bss_start)
{
*bss_start = 0;
bss_start++;
}
}
4.7 打开CPU全局中断
在完成 RAM 初始化和中断向量表初始化后,就可以打开 CPU 全局中断,响应外设中断了;打开 ARM Cortex M 系列 CPU 内核的全局中断通过汇编语句--“cpsie i”完成。
cpsie i /* Unmask interrupts */
4.8跳转到应用程序 main()函数在完成以上准备工作之后,启动过程的最后一步是跳转到应用程序main()函数.
bl main
5. 相关应用
从bootloader跳转到application的时候,要设置应用中R13寄存器中的堆栈地址,然后直接跳转到app中的Reset_Handler执行:bootup_application(0x5000, 0x5004)
同时需要修改app程序中链接器脚本中的连接地址
MEMORY
{
/* Flash */
m_interrupts (RX) : ORIGIN = 0x00005000, LENGTH = 0x00000400
m_flash_config (RX) : ORIGIN = 0x00005400, LENGTH = 0x00000010
m_text (RX) : ORIGIN = 0x00005410, LENGTH = 0x0007FBF0
/* SRAM_L */
m_data (RW) : ORIGIN = 0x1FFF8000, LENGTH = 0x00008000
/* SRAM_U */
m_data_2 (RW) : ORIGIN = 0x20000000, LENGTH = 0x00007000
}
void bootup_application(uint32_t appEntry, uint32_t appStack)
{
static void (*jump_to_application)(void);
static uint32_t stack_pointer;
//shutdown_drivers();
jump_to_application = (void (*)(void))appEntry;
stack_pointer = appStack;
S32_SCB->VTOR = APP_IMAGE_START;
//__set_MSP(stack_pointer);
__asm volatile ("MSR msp, %0
" : : "r" (stack_pointer) : "sp");
//__set_PSP(stack_pointer);
__asm volatile ("MSR psp, %0
" : : "r" (stack_pointer) : "sp");
jump_to_application();
}
审核编辑:刘清
-
ARM处理器
+关注
关注
6文章
361浏览量
43413 -
Cortex-M4
+关注
关注
6文章
100浏览量
48715 -
S32k144
+关注
关注
1文章
9浏览量
2242
原文标题:S32K144启动流程分析
文章出处:【微信号:eng2mot,微信公众号:汽车ECU开发】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录



评论