 基于集成人工肌肉执行器和触觉应变传感器的柔性微指系统
基于集成人工肌肉执行器和触觉应变传感器的柔性微指系统
据麦姆斯咨询报道,近日,一支日本立命馆大学(Ritsumeikan University)的研究团队在Scientific Report期刊上发表了题为“Active tactile sensing of small insect force by a soft microfinger toward microfinger-insect interactions”的最新论文,基于集成人工肌肉执行器和触觉应变传感器的柔性微指,研究团队提出了微机器人与昆虫的交互系统,实现了球潮虫和微指之间的交互,本研究成果有望应用于触觉遥操作机器人系统。
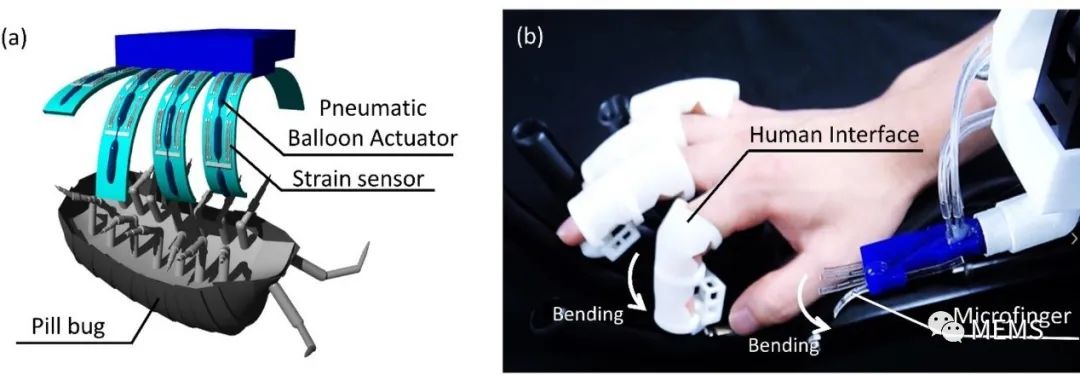
图1 微指-昆虫交互系统
微机电系统(MEMS)和“芯片实验室(LOC)”技术在非常小的芯片上集成了各种传感和执行功能。这些器件将接收到的物理和化学信号转换成电信号,使得生化反应可以在芯片上生成和处理。除了芯片上的检测或反应外,微机械还有潜力作为各种交互作用的中介工具。仿人机器人需要各种传感器和执行器来模仿人类的功能。专业化和差异化的工业机器人配有传感器和执行器以完成其任务。缩小尺寸的微型传感器适用于在不破坏其基本功能的情况下使机器人功能化。此外,微机械有潜力作为与微观世界进行各种交互的中介工具。微机器人能够在这个微观世界中与环境交互,而仿人机器人则是为宏观世界中与人机交互而设计的。将触觉接口与微机器人相结合,甚至可以实现微观世界与我们之间的交互。
微型传感器已被用于测量昆虫等小型生物的力。昆虫的飞行力,作为昆虫的一种典型力,已被人们使用各种方法对其进行了测量。微型传感器的直接测量和运动捕捉的图像处理已被用于力的测量。研究人员利用条纹投影法对飞蛾翅膀的变形、运动和产生的力进行了光学测量。空气动力垂直力约为7mN。它大约是作用在飞蛾身上的重力(约1.3mN)的5倍。
不仅动物,植物也会产生力来改变它们的形状和物理特性。捕蝇草上部叶子的运动是众所周知的植物运动的一个例子。捕蝇草攻击、抓住和压缩猎物时产生的力的测量已经被报道。研究人员使用压电传感器直接测量其捕食时的平均冲击力,并使用摄像机确定时间常数。例如,捕蝇草中两个叶轮缘之间的平均冲击力为149mN。
之前的大多数研究工作都集中在昆虫行为的测量,例如飞行力和腿部力。基于集成人工肌肉执行器和触觉应变传感器的柔性微指(如图1a所示),本研究团队首次提出了微机器人-昆虫的交互系统。微指可以对目标昆虫施加力并刺激昆虫。微指的人工肌肉执行器是一种由聚合物制成的气动球形执行器(PBA),它足够柔软且安全,可以与昆虫温和地交互。在之前的研究中,团队成员已经使用PBA开发了带有微指的机器人操纵系统,实现了物体抓取运动。此外,他们还开发了用于细胞聚集体操纵的微指,可将球形人类骨髓间充质干细胞(hMSC)聚集体(φ200μm)捏住并释放在微孔板上。
除了人工肌肉微执行器之外,本论文的研究还将触觉传感器集成到微指中。最近,团队成员利用液态金属(Galinstan)填充的微通道,开发了一种用于PBA的应变传感器。这种液态金属应变传感器是电阻式的,其应变系数大约为1。该应变传感器可以通过将液态金属填充到微通道中来制造。这项研究表明,集成在微指中的液态金属应变传感器可以检测昆虫的反作用力。因此,微指能够对活体昆虫进行主动力传感。团队成员还开发并报道了一种触觉遥操作机器人系统,该系统由一个从属微指和一个操作员的主接口设备组成。
基于此,本论文提出了一种用于昆虫反作用力主动传感的微指末端执行器,它与交互系统(如双边控制系统和触觉遥操作系统)相结合,具有在微观世界中与昆虫交互的潜力。
集成PBA和应变传感器的微指制造工艺
将微指(12mm × 3mm × 490μm)与PBA和应变传感器集成在一起,制造工艺如图2所示。PDMS层是通过在硅衬底上的光刻胶(SU-8)模具上模制PDMS(Silpot 184, Dow Corning Inc.)制备的。PBA和液态金属基传感器的微通道均由三层PDMS薄膜键合而成。微通道宽为50μm,高为50μm。球形区域宽度为800μm。键合的PDMS薄膜配备有PDMS互连。Galinstan(共晶镓铟锡,Zairyo-ya.com)被注入传感器的微通道中,并通过互连线连接。
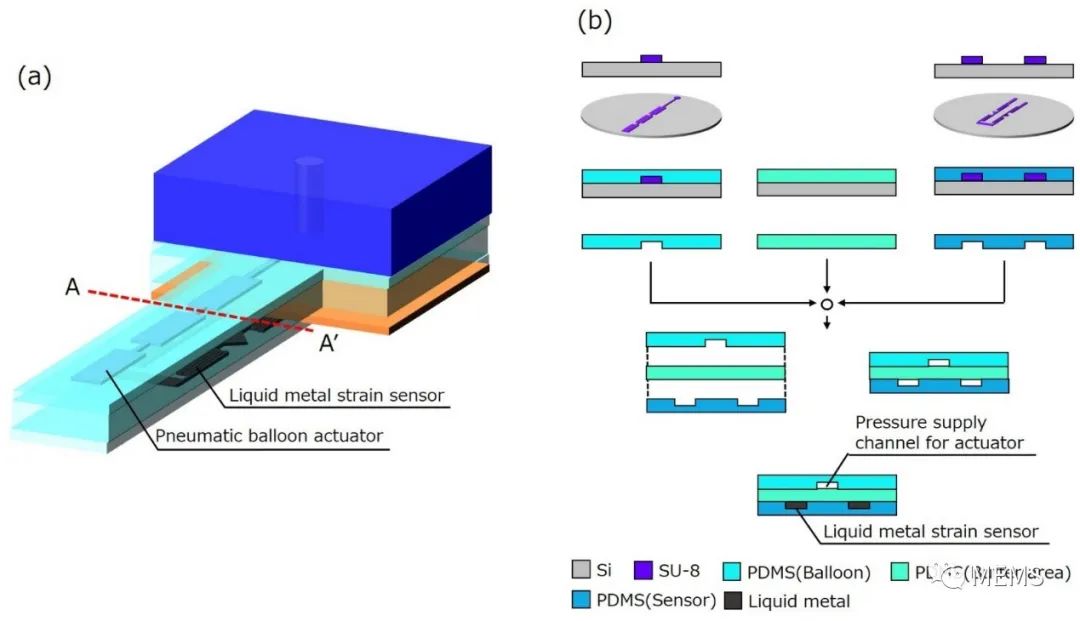
图2 集成PBA和液态金属基传感器的微指制造工艺
基于微指的球潮虫测力实验
这项研究旨在测量球潮虫的腿部力和腹部力。测力实验的施加压力设置为140kPa,可产生15.6mN的力。微指的主动传感被用来测量球潮虫的力。研究人员在球潮虫背面施加吸力使其固定。真空镊子装置被用于昆虫的固定底座。图3a显示了球潮虫腿部力的主动传感,图3b显示了腹部力的主动传感。根据与腿和身体的最佳接触要求,研究人员调整了球潮虫的姿态角,如图3所示。在腿部力测量中,球潮虫被设置为侧向姿势,而在腹部力测量中,它被调整为仰卧姿势。
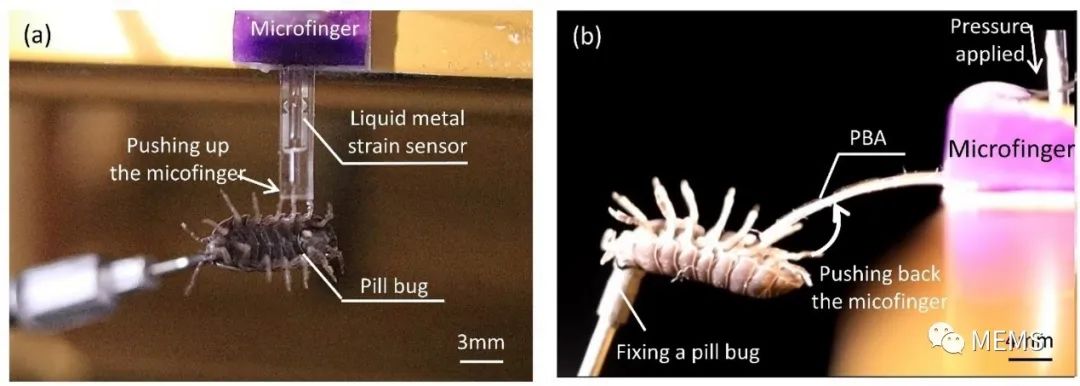
图3 利用微指测量球潮虫的力
球潮虫测力实验结果
图4显示了利用微指主动传感测得的球潮虫的力。图4a和4b分别显示了随时间变化的测得的腿部和腹部力。测量的腿部力小于10mN,如图4a所示。腿部运动的频率大约为0.3Hz。测得的腹部力超过10mN,大于腿部力,如图4b所示。图4b中腹部运动的频率低于腿部运动的频率,估计约为0.03Hz。腿部运动的频率远高于腹部运动的频率。将微指推回的位移量越大,往往会显示出更大的力。
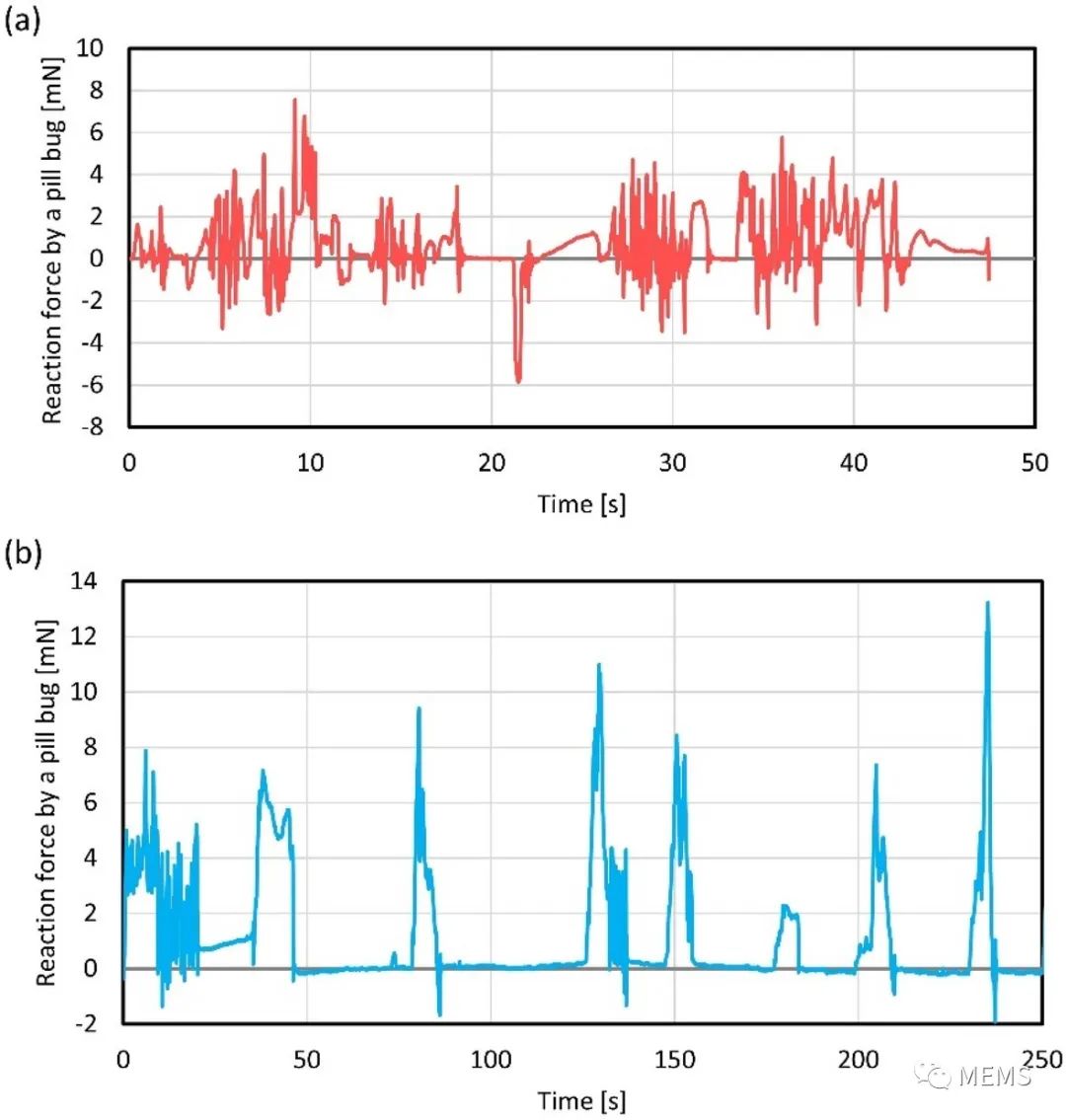
图4 通过微指主动传感测得的球潮虫的力
实验中检测到的信息可用于图1b所示的触觉遥操作机器人系统,它将微指作为从属组件,并与操作员的主接口设备相结合。该系统能够通过触觉遥操作机器人系统呈现由微指与昆虫交互获得的触觉。
综上,基于与人工肌肉执行器和触觉传感器集成的柔性微指,研究团队提出了微机器人-昆虫交互系统,该技术是为触觉遥操作机器人系统开发的。研究团队实现了球潮虫和微指之间的交互。微指(12mm × 3mm × 490μm)作为末端执行器,可以移动和触摸昆虫,并且可以检测昆虫的反作用力。本文的研究结果将推动对微小型生物的进一步评估,以及人类与环境交互的技术发展。
-
传感器
+关注
关注
2557文章
51729浏览量
758809 -
机器人
+关注
关注
212文章
28910浏览量
209651 -
交互系统
+关注
关注
0文章
36浏览量
8206
原文标题:基于柔性微指的主动触觉传感系统,实现微机器人与昆虫的交互
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
[分享][下载]美国PPS触觉传感器有限公司
[原创]美国PPS触觉传感器有限公司
美国PPS触觉传感器有限公司
无线传感器及执行器网络
柔性结构振动主动控制中传感器/ 执行器
带触觉反馈的压电执行器:全新尺寸,非凡性能
带触觉反馈的PowerHap压电执行器
MEMS微执行器技术现状与未来展望
汽车控制系统中的电子控制单元和传感器以及执行器
迅速增长的MEMS传感器和执行器应用
物联网执行器和传感器
采用梯度刚度滑动设计的柔性应变传感器






 工商网监
工商网监
评论