 三菱伺服系统的基础和应用介绍
三菱伺服系统的基础和应用介绍
第1章 什么是伺服?
1.1伺服的作用
将物体移动到规定的位置,或者跟踪一个运动的目标时,经常能听到“伺服”这个词。“伺服(Servo)机构”一词的词源据说来自拉丁语中的“Servus”,即“奴隶”的意思。表示完全按照指令行动而构建的控制系统。利用伺服机构可进行位置、速度、转矩的单项控制及组合控制。 位置控制 可正确地移动到指定位置,或停止在指定位置。位置精度有的已可达到微米(μm:千分之一毫米)以内,还能进行频繁的起动、停止。
速度控制 目标速度变化时,也可快速响应。即使负载变化,也可最大限度地缩小与目标速度的差异。能实现在宽广的速度范围内连续运行。
转矩控制 即使负载变化,也可根据指定转矩正确运行。※转矩是使转轴旋转的“力”。
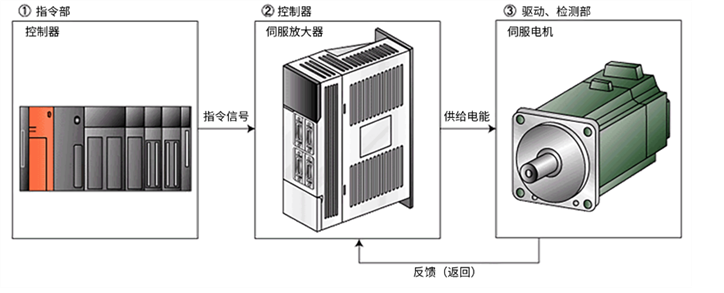
为了实现既灵敏又高精度的动作,始终确认自己的动作状态,避免与指令发生偏差而不断进行反馈(feed back),这就是伺服机构的特点。如何进行控制以缩小指令信号与反馈信号之差至关重要。 JIS中“伺服机构”的定义:“以物体的位置、方位、姿势等作为控制量,为跟踪目标的任何变化而构建的控制系统” 伺服机构大致由下列各部分组成。
| 指令部 | 发出动作的指令信号。 | 驱动、检测部 | 驱动控制对象,对其运行状态进行检测。 |
| 控制部 | 使电机等按照指令运行。 |
实际的机构虽然也有液压式和气压式的,但最近广泛使用维护性能优良的电气式伺服机构。
电气式伺服机构中尤其与FA相关的精密控制中,经常使用AC伺服系统。
而且,伺服电机常带有可检测旋转角度、速度和方向的编码器,它可将检测信息反馈给伺服放大器(控制部)。
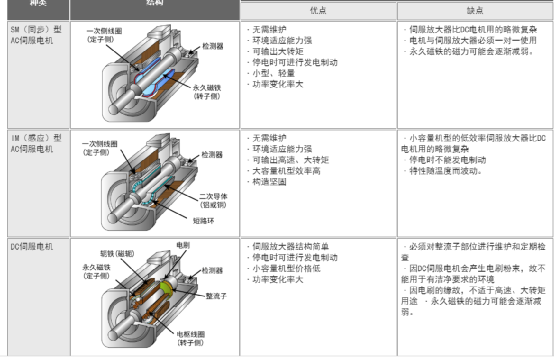
[ 伺服电机的种类 ] 普通的伺服电机有SM(同步)型AC伺服电机、IM(感应)型AC伺服电机和DC伺服电机3种。
与FA相关的伺服电机,尤其是需求量大的中、小容量,由于下列原因通常说到伺服一般都是指SM型AC伺服电机。

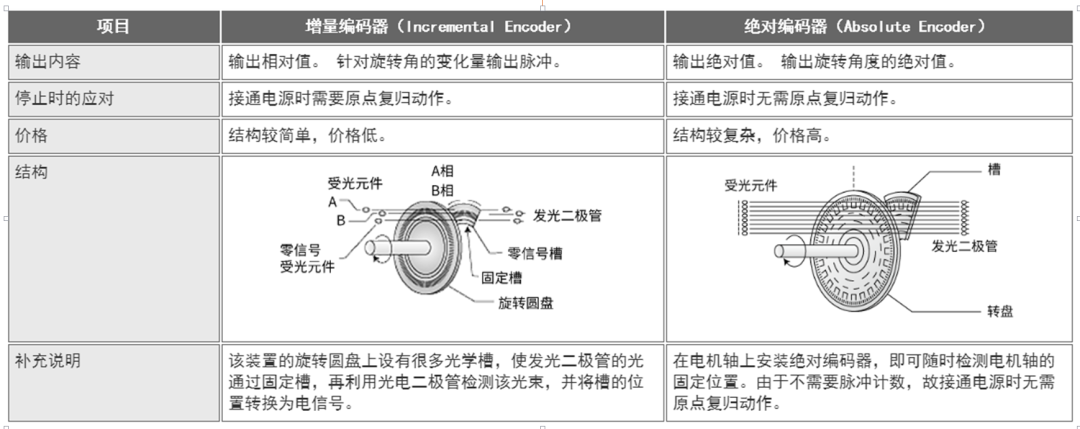
1.2编码器的种类 <增量编码器与绝对编码器> 最新的伺服电机多采用停电后无需进行原点复归的绝对编码器。绝对编码器中有检测电机旋转1圈内所处位置的绝对位置检测部和计算旋转了几圈的多圈检测部。为了防止多圈检测数据在停电时丢失,由电池维持数据。
下图为光学式编码器的原理说明。最近,各公司已对分辨率极高(也有超过100万[脉冲/转])的编码器实现了产品化。通常,光学式编码器用于追求小型化或高分辨率等特性的应用领域,在特别追求耐环境性能(耐污染性能强等)的应用领域,有时也使用磁力式编码器
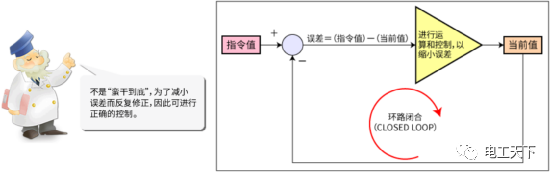
1.3伺服的原理和构成 伺服系统的最大特点是“比较指令值与当前值,为了缩小该误差”进行反馈控制。 反馈控制中,确认机械(控制对象)是否忠实地按照指令进行跟踪,有误差(偏差)时改变控制内容,并将这一过程进行反复控制,以到达目标。 注意到该控制流程是:误差→当前值→误差,形成一个闭合的环,因此也称为闭环(CLOSED LOOP)。
反之,无反馈的方式,则称为开环(OPEN LOOP)。
根据指令值的不同,伺服系统的控制模式有以下3种。 (1) 位置控制模式
(2) 速度控制模式
(3) 转矩控制模式 有的伺服产品,还可在运行过程中切换模式。
| 例. | 从速度控制模式切换到转矩控制模式 |
卷筒开始卷绕时以指定速度(速度控制模式)运行。 之后为了以恒定张力卷绕,按转矩控制模式运行。 |
此外,最近有一种称为“运动控制”的控制方式也开始被采用,它适用于由1台控制器对多个轴进行同时控制的多轴同步控制。 伺服的控制环 从信号的流程着眼,伺服的构成如下图所示。
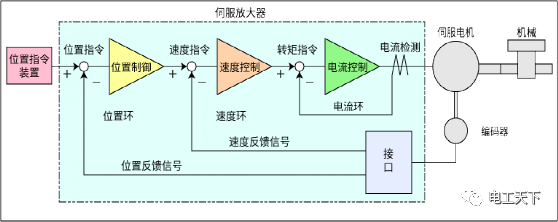
在AC伺服系统中,对装在伺服电机上的编码器所发出的脉冲信号或伺服电机的电流进行检测,将结果反馈至伺服放大器,并根据这个结果按照指令来控制机械。 该反馈有以下3种环。
| 位置环 | 根据编码器脉冲生成的位置反馈信号,进行位置控制的环。 |
| 速度环 | 根据编码器脉冲生成的速度反馈信号,进行速度控制的环。 |
| 电流环 | 检测伺服放大器的电流,根据生成的电流反馈信号,进行转矩控制的环。 |
各环都朝着使指令信号与反馈信号之差为零的目标进行控制。
各环的响应速度按下述顺序渐高。 (位置环)<(速度环)<(电流环) 各控制模式中使用的环如下所示。
| 控制模式 | 使用的环 |
| 位置控制模式 | 位置环、速度环、电流环 |
| 速度控制模式 | 速度环、电流环 |
| 转矩控制模式 | 电流环 (但是,空载状态下必须限制速度) |
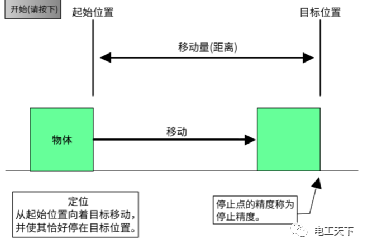
[ 位置控制模式 ] (a) 定位控制的目标 FA设备中的“定位”是指工件或工具(钻头、铣刀)等以合适的速度向着目标位置移动,并高精度地停止在目标位置。这样的控制称为“定位控制”。
可以说伺服系统主要用来实现这种“定位控制”的目的。
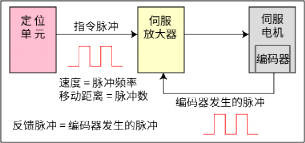
定位控制的要求是“始终正确地监视电机的旋转状态”,为了达到此目的而使用检测伺服电机旋转状态的编码器。
而且,为了使其具有迅速跟踪指令的能力,伺服电机选用体现电机动力性能的起动转矩大而电机本身惯性小的专用电机。 伺服系统的定位控制基本特点如下所述。 机械的移动量与指令脉冲的总数成正比。 机械的速度与指令脉冲串的速度(脉冲频率)成正比。 最终在±1个脉冲的范围内定位即完成,此后只要不改变位置指令,则始终保持在该位置。
(伺服锁定功能)
因此,伺服系统中的位置精度由以下各项决定。 伺服电机每转1圈机械的移动量 伺服电机每转1圈编码器输出的脉冲数 机械系统中的间隙(松动)等误差 [ 速度控制模式 ] 伺服系统的速度控制特点:可实现“精细、速度范围宽、速度波动小”的运行。 (a) 速度加速·减速常数设定
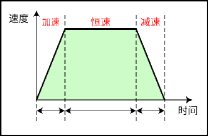
可调整加减速运动中的加速度(速度变化率),避免加速、减速时的冲击。 (b) 速度控制范围宽 可进行从微速到高速的宽范围的速度控制。
(1:1000~5000左右)速度控制范围内为恒转矩特性。 (c) 速度变化率小 即使负载有变化,也可进行小速度波动的运行。 [ 转矩控制模式 ] 转矩控制就是通过控制伺服电机的电流,以达到输出目标转矩的控制。 <以收卷控制为例> (a) 进行恒定的张力控制时,由于负载转矩会因收卷滚筒半径的增大而增加,因此,需据此对伺服电机的输出转矩进行控制。
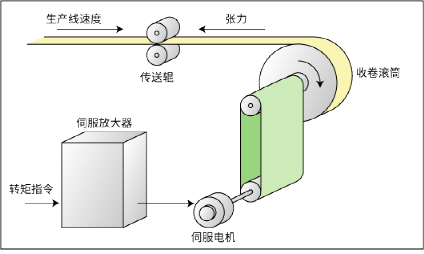
(b) 卷绕过程中材料断裂时,将因负载变轻而高速旋转,因此,必须设定速度限制值。

(通用)变频器与(通用)伺服在使用目的、功能方面存在本质上的差异。选择哪一个取决于运行模式、负载条件、价格等因素。
| 比较项目 | (通用)变频器 | (通用)变伺服 | |
| 控制用途 | 控制对象为比较缓和的稳定状态。 | 要求进行过渡性的高速、高精度控制的用途。 | |
| 控制功能 | 基本上以速度控制模式为对象。 | 适用于位置控制、速度控制和转矩控制的各种模式。 | |
| 使用电机 | 使用通用(感应)电机。 | 基本上根据与伺服放大器的关系有专用的固定的几种类型 | |
| 多台电机的运行 | 1台变频器可驱动多台电机。 | 原则上1台伺服放大器驱动1台电机。 | |
| 价格 | (比较)低。 | (比较)高。 | |
| 响应性能(越高越好) | 低。100rad/s以下。 | 高。200~1500rad/s左右。 | |
| 停止精度 | 最高可达100μm左右。 | 最高可达1μm左右。 | |
| 起动/停止频率(可起动/停止的次数) | 20次/分钟以下。 | 20~600次/分钟左右。 | |
| 速度变化率 | 大。由于没有速度反馈,会受到负载变化等的影响。 | 小。由于有速度反馈,可排除负载变化等的影响。 | |
| 连续运行范围(100%负载下连续运行) | 小。1:10左右。 | 大。1:1000~1:5000左右。 | |
| 最大转矩(额定转矩比) | 150%左右。 | 300%左右。 | |
| 输出功率 | 100W~300KW左右。 | 10W~60KW左右。 | |
2.2基本构成的比较 大致分为进行电力变换的主回路和指示如何进行变换的控制回路。
| 主回路 |
变频器与伺服的构成基本相同。 两者的区别在于伺服中增加了称为动态制动器的部件。 停止时该部件能吸收伺服电机积蓄的惯性能量,对伺服电机进行制动。 |
| 控制回路 |
与变频器相比,伺服的构成相当复杂。 为了实现伺服机构,需要复杂的反馈、控制模式切换、限制(电流/速度/转矩)等功能。 |
(1) 变频器的基本构成
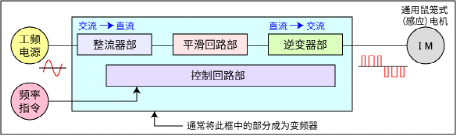
各部分的作用如下。
| ● 整流器部 | ・・・ | 将工频电源从交流转换为直流。 |
| ● 平滑回路部 | ・・・ | 使直流中的波动成分变得平滑。 |
| ● 逆变器部 | ・・・ | 将直流转换为频率可调的交流。 |
| ● 控制回路部 | ・・・ | 主要控制逆变器部。 |
(2) 伺服的各基本构成部分作用如下。
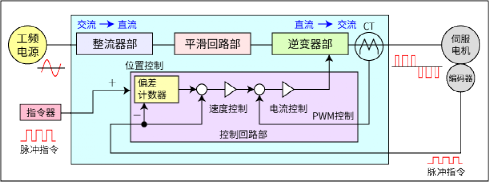
| ● 整流器部 | ・・・ | 将工频电源从交流转换为直流。(与变频器相同) |
| ● 平滑回路部 | ・・・ | 使直流中的波动成分变得平滑。(与变频器相同) |
| ● 逆变器部 | ・・・ |
将直流转换为频率可调的交流。 与变频器的区别在于伺服中增加了称为动态制动器的部件。 |
| ● 控制回路部 | ・・・ |
主要控制逆变器部。 与变频器相比,伺服的构成相当复杂。因为伺服机构需要反馈、控制模式切换、限制(电流/速度/转矩)等功能。 |
2.3由变频器变更为伺服 基本上伺服的性能比变频器优越。
因此,由变频器变更为伺服时,一般不会产生运行方面的问题。但是,必须考虑下列几点。
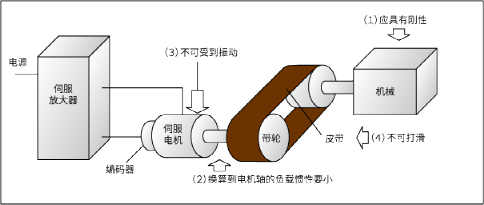
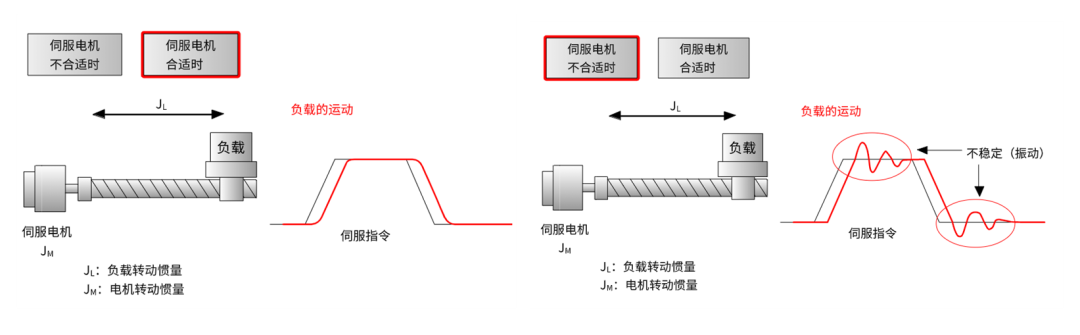
(1)机械侧的刚性 伺服的最大转矩大约是变频器的2倍。因此,如果机械结构比较脆弱,加、减速时可能会产生振动(振荡现象)。此时,须采取加固机械结构、减小伺服系统的增益(控制灵敏度)等措施。 三菱电机的某些伺服产品在伺服放大器控制环路中内置了滤波器功能,在机械容易振动的频率(共振频率)附近能自动调小伺服系统的增益,使设备具有抑制振动的功能。 (2) 换算到电机轴的负载惯性大小(惯性) 与变频器相比,伺服对于负载惯性的大小很敏感。
相对于电机本身的转动惯量,如果负载的转动惯量过大,则电机轴会被负载拖着旋转,从而导致控制不稳定。 因此,根据机械负载选择合适的伺服容量至关重要。 以稳定性为目标,相对于电机本身的转动惯量,希望负载转动惯量(换算到电机轴)的倍数小于该电机的“推荐负载转动惯量比”。
(3) 电机轴的振动 安装电机的部位发生机械性振动时,会给电机的转轴带来影响。
尤其对内置编码器的伺服电机,有时必须采取降低振动的措施。 (4) 减速机构的打滑 有V形带减速机构的系统,为了使皮带传动部分不打滑,必须采取一些措施,如同步带等。
审核编辑:郭婷
-
控制系统
+关注
关注
41文章
6671浏览量
110969 -
伺服电机
+关注
关注
85文章
2061浏览量
58321
原文标题:三菱伺服系统入门知识,学习笔记!
文章出处:【微信号:旺材伺服与运动控制,微信公众号:旺材伺服与运动控制】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
三菱PLC伺服控制系统介绍
CC-Link IEFB转PROFINET应用于西门子伺服接入三菱PLC






 工商网监
工商网监
评论