 MEMS惯性传感器的坐标系定义
MEMS惯性传感器的坐标系定义
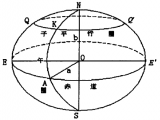
地惯性坐标系圆心一般取地心,X轴在地球赤道平面指向春分点,Z轴与地球极轴重合指向北极,Y轴与XZ两轴构成右手直角坐标系。惯性元件陀螺仪和加速度计输出的角运动和线运动就是相对于惯性系而言的。
地心地固坐标系 (ECEF, e-frame)
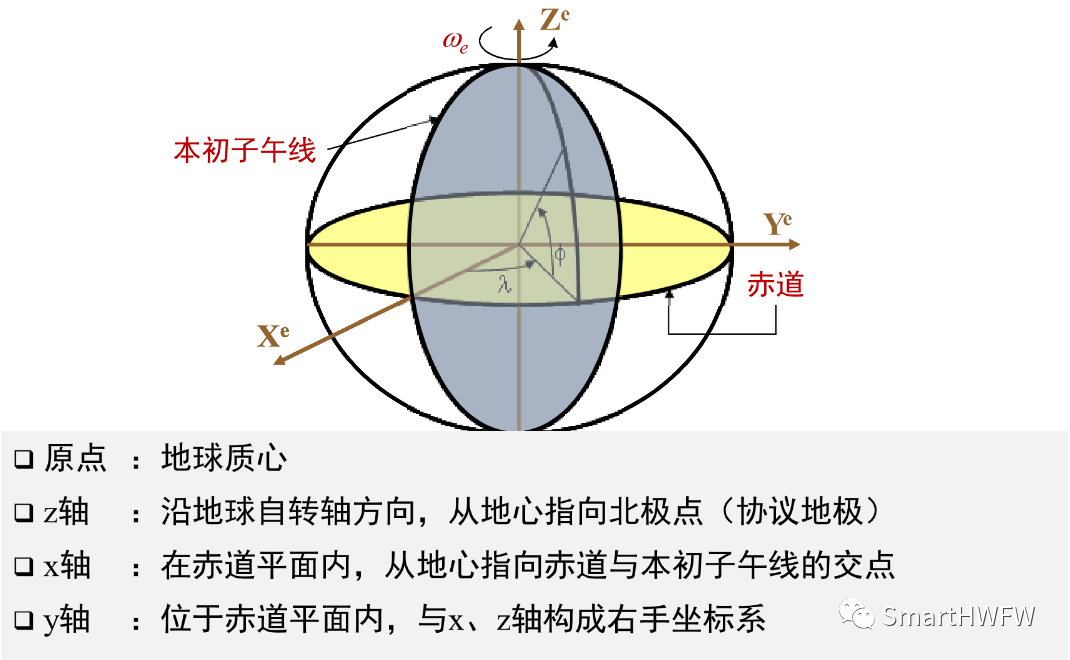
地球坐标系与地球固连,随地球一起转动。X轴在赤道平面与本初子午面的交线上,Z轴沿极轴(地轴)方向,Y轴在赤道平面内与X、Z轴构成右手直角坐标系。 地心地坐标系相对于惯性坐标系的角运动就是地球自转的角速率。
导航坐标系 (n-frame)
又称为当地水平坐标系、地理坐标系 (g系, geographic frame)
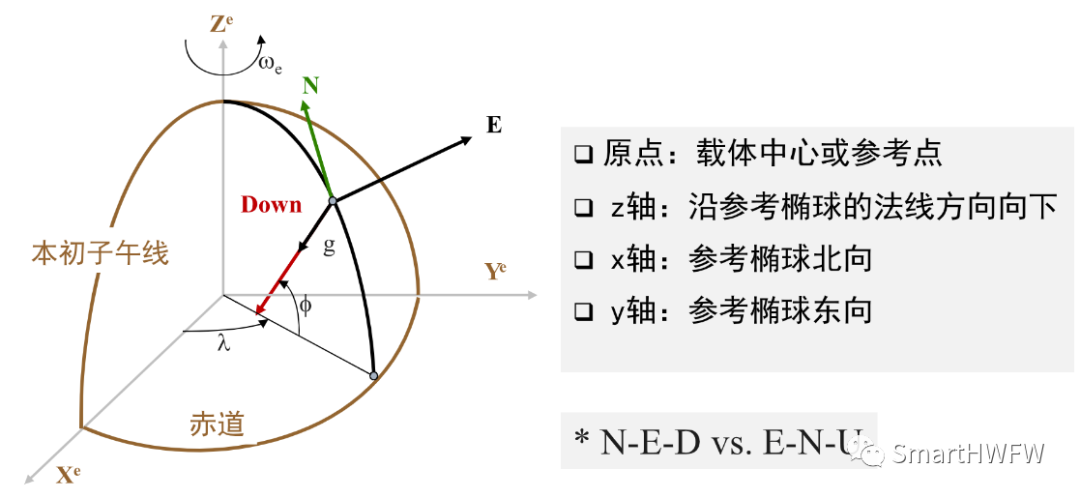
其原点为载体所在的点,X轴沿当地纬线指东,Y轴沿当地子午线指北,Z轴沿当地地理轴线指上并与X、Y轴构成右手直角坐标系。XY轴构成的平面即为当地水平面,YZ轴构成平面为当地子午面。 按坐标轴不同取法,可分为“东、北、天”即ENU或“北、东、地”/NED等。通常取用东北天地理坐标系作为导航的参考坐标系,能够适应除极区外的导航应用。
载体坐标系 (b-frame)
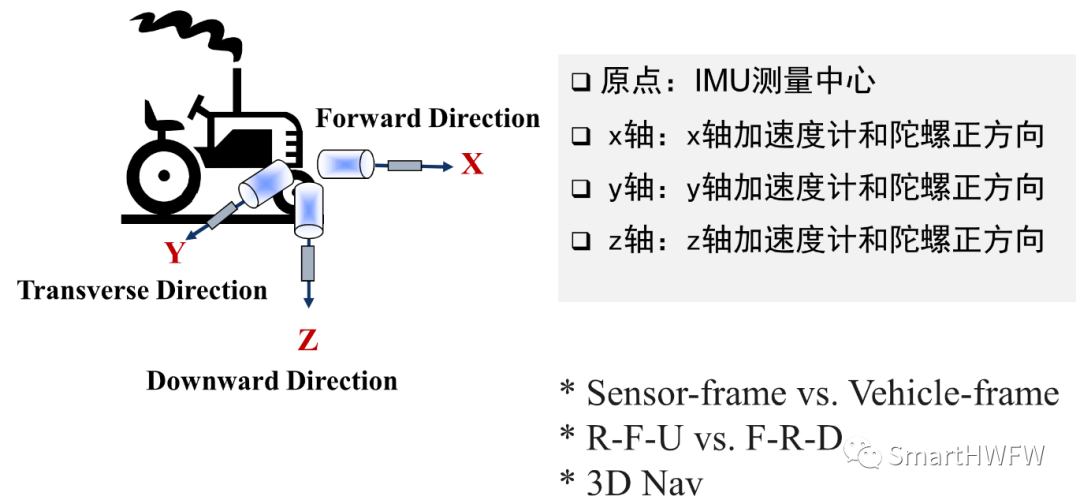
其原点与载体质心重合。机体系X轴沿运载体横轴线指右,Y轴沿纵轴指前,Z轴沿运载体竖向并与X、Y轴构成右手直角坐标系。 坐标轴也有其他取法,如X轴沿载体纵轴指前,Y轴指右,Z轴沿载体竖轴与X、Y轴构成右手直角坐标系。
审核编辑:郭婷
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2551文章
51163浏览量
754133
原文标题:MEMS 惯性传感器 04 - 坐标系定义
文章出处:【微信号:SmartHWFW,微信公众号:SmartHWFW】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
如何选择合适的MEMS传感器
在现代技术中,MEMS传感器因其小尺寸、低成本和高集成度而变得越来越重要。它们广泛应用于消费电子、汽车、医疗设备和工业自动化等领域。选择合适的MEMS传感器对于确保系统性能和可靠性至关
MEMS传感器应用领域 MEMS技术在智能手机中的应用
MEMS传感器,即微型传感器,是将机械结构和电子电路集成在一块硅片上的高科技装置。其应用领域广泛,特别是在智能手机中的应用尤为突出。以下是对MEMS
mems传感器是什么意思_mems传感器原理是什么
、感应电路和信号处理电路组成,能够用于测量和检测各种物理量,如压力、温度、加速度、角速度、湿度等。 一、MEMS传感器的定义与特点 MEMS传感器
abb机器人工具坐标系问题
各位大佬请教一下,abb机器人工具坐标系用四点法,六点法,手动输入等方式标定出的工具坐标系的Z方向与实际工具的长度不符,实际工具长度越长坐标系z方向的差距越大。比如实际工具400mm坐标系
发表于 08-07 11:11
GNSS仿真测试之三种常用坐标系与转换
、可靠地工作的关键步骤。无论是为了确保定位精度、测试信号干扰的影响,还是评估在复杂环境下的导航可靠性,掌握正确的坐标系知识对于进行有效的仿真测试至关重要。 在GNSS仿真测试的领域,三种关键的坐标系构成了我们工作的核心:地心地固坐标系
导远科技在北京车展展示其自主研发的新一代MEMS惯性导航芯片
4月25日,导远科技在阔别四年的北京车展展示其自主研发的新一代MEMS惯性导航芯片,并亮相多款定位感知传感器产品。

MEMS传感器细分领域未来方向,关注射频、惯性和压力三大应用领域(深度分析)
据传感器专家网获悉,华安证券发布研报称,根据Yole的数据, MEMS 市场空间将从2021一年的136亿美金,提升至2027年的223亿关金。整体CAGR的增长年复合增长率为9%。到2027年
arcmap如何设置地理坐标系
ArcMap是一个功能强大的地图制作和分析软件,可以用来设置地理坐标系。地理坐标系是一种将地球表面上的位置表示出来的方法,它使用经度和纬度来确定地点。 要设置地理坐标系,可以按照以下步骤进行操作
推荐一个好用的高精度MEMS惯性测量单元
~+105 °C
规格尺寸:22.4mm ×22.4mm ×9.0mm
三 典型应用领域
L2~L5智能驾驶
组合导航系统自主导航
ADAS传感器精准平台稳定
详细资料请查阅手册;*附件:RJX-IMU-16460惯性测量单元产品手册.pdf
发表于 01-18 13:46
MEMS气体传感器应用和发展
的角色。 随着经济的发展、技术的进步,气体传感器的应用更加广泛,逐渐向小型化、集成化、模块化、智能化方向发展。这些年,随着MEMS(微机电系统)技术的进步,以MEMS技术为基础的气体传感器
【先楫HPM5361EVK开发板试用体验】06-基于MPU9250的姿态解算
、PA29。
通过上图可知MPU9250定义了一个X/Y/Z方向的坐标系,这个坐标系为ENU坐标系,具体相关可以参考以下出处:
无人机运动学控制中的
发表于 01-17 14:55
村田发布新款6轴MEMS惯性传感器SCH16T-K0
全球领先的电子元器件制造商村田(Murata)近日发布了其全新的6轴MEMS惯性传感器SCH16T-K01。这款产品是村田下一代6轴SCH16T系列的首款产品,未来该系列还将推出更多创新版本。
村田发布了一款新的6轴MEMS惯性传感器SCH16T-K01
据麦姆斯咨询报道,综合电子元器件全球制造商村田(Murata)近日发布了一款新的6轴MEMS惯性传感器SCH16T-K01,可实现高精度机器控制和定位应用。





 工商网监
工商网监
评论