 构建后摩尔时代新型电子器件实现新一代交互式感知存储
构建后摩尔时代新型电子器件实现新一代交互式感知存储
大脑支撑着人类的视觉、听觉、味觉、嗅觉、学习、记忆、情感、平衡以及其他与感知有关的功能。
在处理模式识别、风险管理或活动决策等复杂任务时,即使是当今最强大的计算机也无法与人脑竞争。
这可以归结为以下原因:首先,传统计算机依赖于冯·诺依曼架构,由于处理器和内存分离,发展至今遇到了内存墙的能效瓶颈以及摩尔定律失效的困境。
其次,模拟(传感)信号和数字(计算)信号的信号域不同,随着传感器节点数量的增加,信号转换和大量冗余数据逐渐成为感知系统的负担。
受人脑和生物神经系统的启发,设计交互式神经形态器件和芯片来整合感知、存储和处理能力,成为突破冯·诺伊曼构架瓶颈的曙光。
据麦姆斯咨询报道,近期,中科院北京纳米能源与系统研究所孙其君研究员以及王中林院士团队总结了生物启发的交互式神经形态器件的研究进展,包括神经形态触觉系统、视觉系统、听觉系统等。
概括性的描述了用于交互式神经形态器件的基本模型,从材料特性、器件结构、工作机制、性能指标和潜在应用等几个方面对这些交互式神经形态系统进行了详细的讨论。此外,该论文还提出了可以融合多种/混合传感信号的交互式神经形态系统,以解决更现实和复杂的问题。
并进一步对计算神经元和整合感觉神经元的优缺点进行了比较。通过各种传感器和突触器件的组合,生物启发的交互式神经形态器件可以为突破冯氏瓶颈,构建后摩尔时代新型电子器件,实现新一代交互式感知、存储、计算提供新的解决方案。
如图1所示,计算范式目前在经历从冯·诺依曼架构到交互式神经形态计算的革命性转变。由于与传统的计算机在信号处理方式上的不同,从感存算分离到感存算一体,神经形态芯片可以模拟人脑的功能和工作模式来处理更复杂的任务(如体感、图像和语音识别)。
神经形态器件的研究和开发被认为是通向未来人工智能时代的主要途径之一。因此,从底层出发构建固态电子器件和系统,模拟生物感觉突触和神经元,并开发超低功耗的类脑芯片具有重要的研究价值。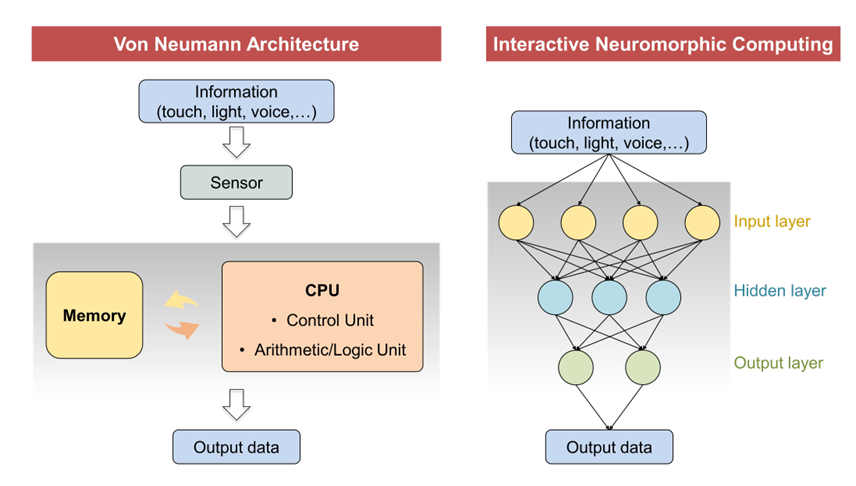
图1 计算范式从冯·诺依曼架构到生物启发的交互式神经形态计算的革命性转变
交互式神经形态器件的基本模型包括以下三种形式:在器件层级模拟神经元活动,在网络层级模拟由类神经元器件连接的神经网络,以及在系统层级模拟与外部环境的交互感知(图2)。早期开发的突触器件主要使用电脉冲作为刺激信号,缺乏对各种感觉行为的模拟。
为了模拟一个更真实的神经系统,非常有必要探讨感觉信号对突触权重更新过程的影响。一个生物启发的交互式神经形态器件通常包括一个仿生受体(传感器)和人工突触器件。仿生受体用于感知外部刺激(如压力、声音、光和热),并将刺激转化为电信号,从而实现进一步的信息传递并激活突触器件(图3)。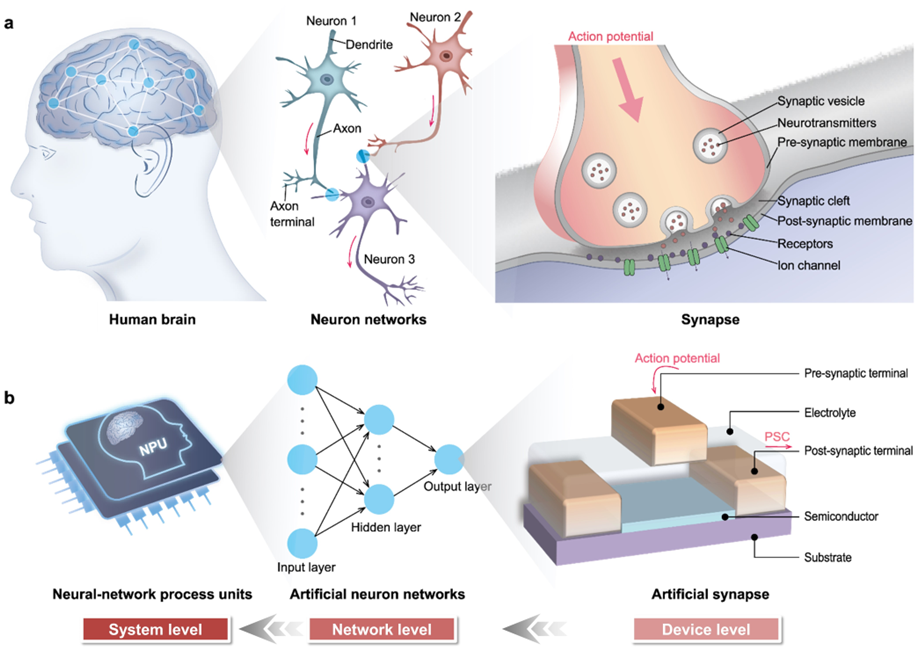
图2 人类神经系统和仿生神经形态器件/系统的比较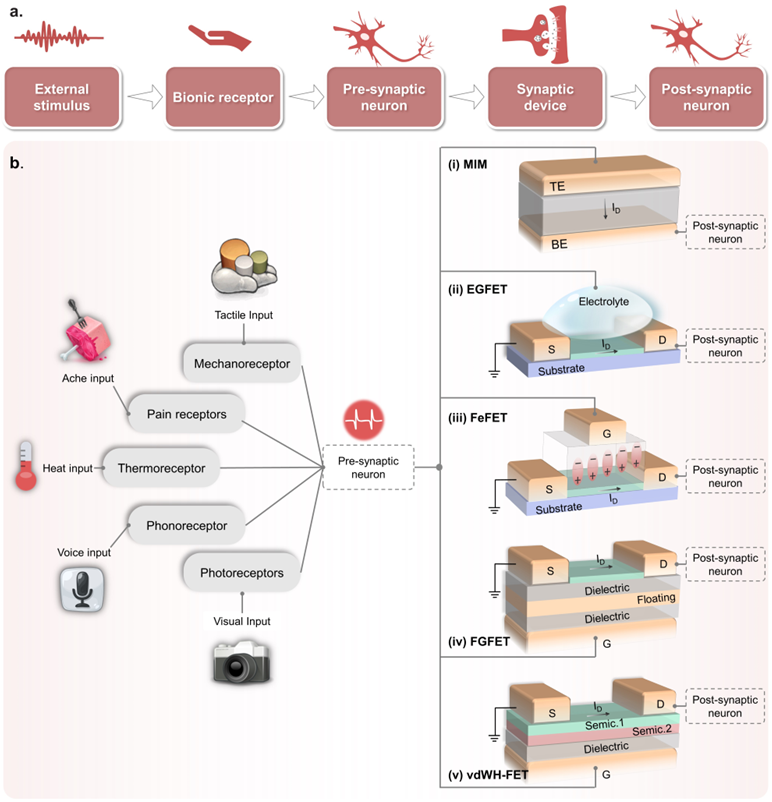
图3 仿生交互式神经形态器件的分类和示意图
图4显示了生物启发的交互式神经形态器件/系统的里程碑式时间线。依据传感器类型,可划分为神经形态触觉系统、视觉系统、听觉系统和多感官系统。此外,该综述还详细讨论了这些交互式神经形态系统的材料特性、器件结构、工作机制、性能指标和潜在应用等。
最后分别从材料、设备、网络和系统集成等4个层面,提出了交互式神经形态器件在未来发展中面临的机遇和挑战(图5)。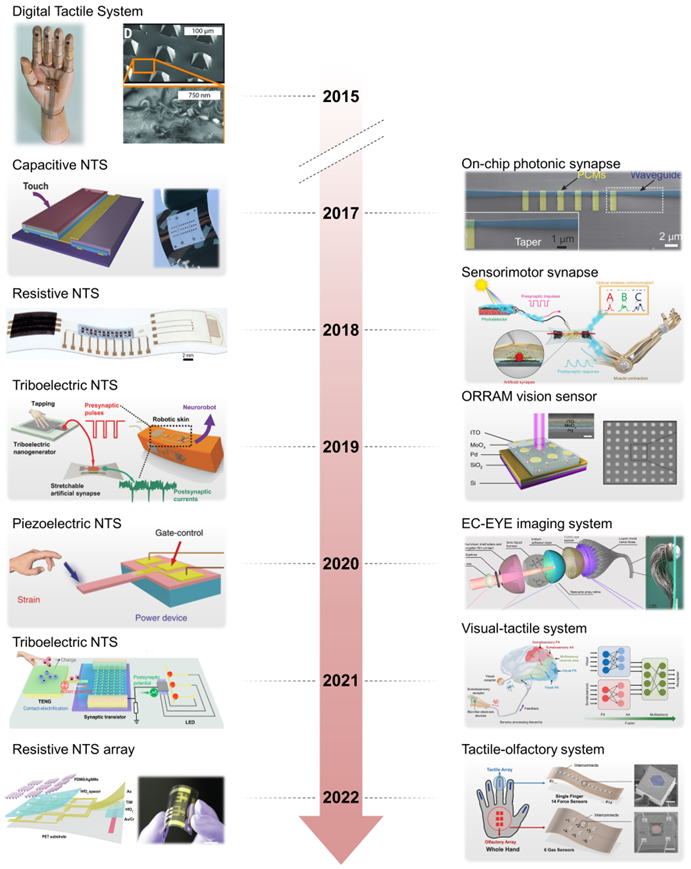
图4 生物启发的交互式神经形态器件的发展历程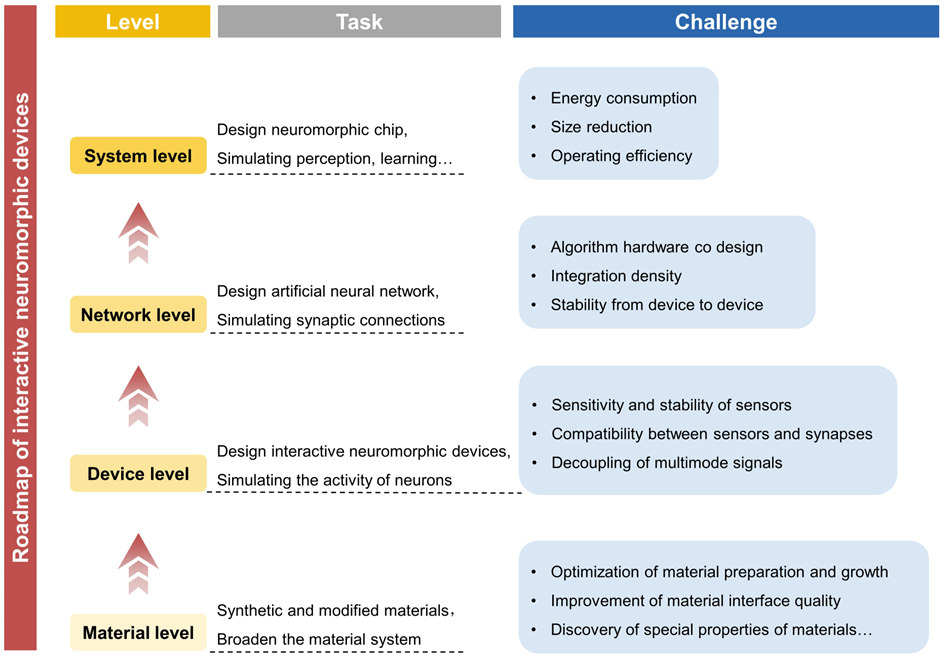
图5生物启发的交互式神经形态器件的未来发展路线图
总而言之,利用“传感器+突触器件”的仿生交互式神经形态器件和系统模型,实现并行感知、存储和计算的协同融合功能,是一种突破冯氏瓶颈、构建后摩尔时代新型电子器件的有效途径,相关研究如旭日初升,又荆棘满路。不同类型的传感器和突触器件尺寸、功耗、稳定性和兼容性,多耦合信号的解耦和串扰以及片上集成等问题都亟待解决。
通过对交互式神经形态器件的未来发展路线进行的定位和展望来看,其未来发展高度需要优化对传感器、神经形态器件和相关兼容算法的集成。
论文链接:
https://doi.org/10.1016/j.mattod.2022.09.012
审核编辑:刘清
-
传感器
+关注
关注
2554文章
51700浏览量
758544 -
处理器
+关注
关注
68文章
19523浏览量
231768 -
人工智能
+关注
关注
1799文章
48047浏览量
241944 -
电信号
+关注
关注
1文章
841浏览量
20771
原文标题:综述:仿生交互式神经形态器件研究进展
文章出处:【微信号:Micro-Fluidics,微信公众号:微流控】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
广电计量受邀参加后摩尔器件研讨会 携半导体综合技术解决方案亮相

ESD对于电子器件的破坏机理分析

功率电子器件控制电路的设计和功能
高功率电子器件的散热方案
电流驱动型电子器件的基本概念、工作原理及分类
电压驱动型电力电子器件的优点
电压驱动的电力电子器件有哪些
浪潮信息推出基于新一代分布式存储平台AS13000G7的AIGC存储解决方案

交互式AI领导者声通科技,引领企业级市场进入智能问答时代
中国企业级交互式人工智能市场潜力巨大,声通科技积极拓展市场份额

声通科技全栈交互式人工智能,助力企业智能化升级
京东方加码投资安徽合肥!传感柔性调光膜及电子器件项目签约






 工商网监
工商网监
评论