 PID控制算法基本原理
PID控制算法基本原理

大家好,我是ST。
在讲解PID算法之前,在此抛出一个问题,如何通过算法控制加热器使水温稳定在50摄氏度?
一、传统的位式控制算法(非PID算法)
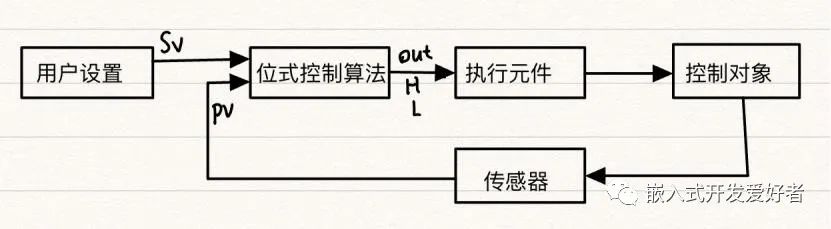
(1)算法逻辑:用户设置目标温度Sv为50,传感器检测控制对象即水的温度Pv
①当Pv ②当Pv==SV时,表示实际温度等于目标温度,不输出
③当Pv>Sv时,表示实际温度高于目标温度,输出低电平OUT=L,让执行元件即加热器不工作,即0功率输出
(2)代码实现:
#define Sv 50
void func(unsigned int Pv)
{
if(Pv
(1)缺点
①控制算法过于简单,单纯对设定值和输出值进行比较,一旦发现低于设定值,就输出高,否则就输出低
②要么处于全功率下,要么处于0功率下工作
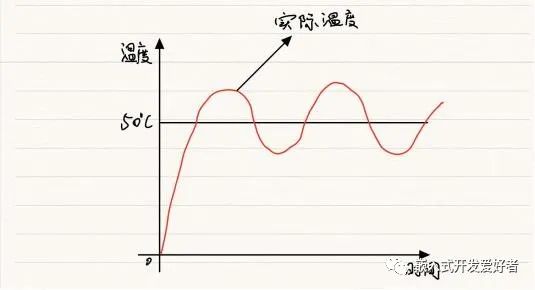
③会导致温度总是在设定值上下波动如下图所示,因为控制对象具有一定的惯性,即加热时水的温度不会立即上升,不加热时水的温度不会立即下降
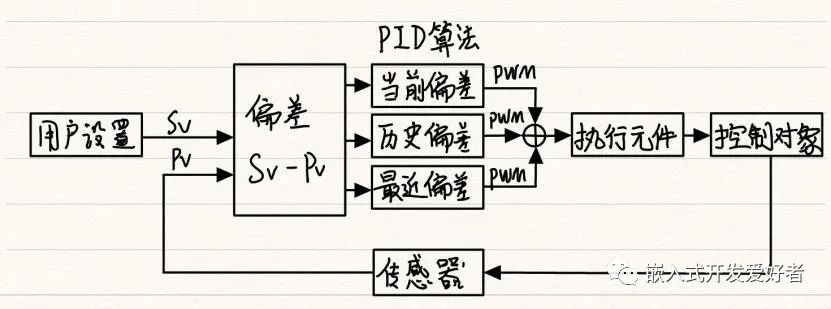
二、PID闭环控制
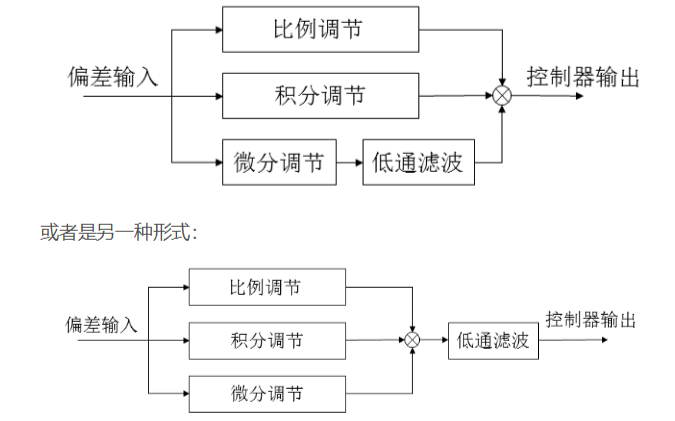
PID闭环即比例-积分-微分控制,即通过对偏差进行比例-积分-微分控制,使得当前值趋于目标值的过程。一般来说,比例P控制是必须的,所以衍生出很多组合的PID控制,如PD、PI、PID。离散PID公示为:

其中,e(k):为k时刻的偏差,u(k):为输出的控制量(对于加热器来说是PWM)
(1)比例控制(P)
Sv为用户设置目标值,Pv为控制对象即水的当前温度值
Ek为目标温度与当前温度的偏差:Ek=Sv-Pv
①当Ek<0时,表示当前温度未达标
②当Ek==0时,表示当前温度正好达标
③当Ek>0时,表示当前温度已超标
比例控制算法公式:PWM=Kp*Ek
Kp参数的解释:Kp可以理解为一个衰减器或者放大器,主要是用来调整偏差值,调整其增益或者说是放大倍数
比例控制的作用:
调节到达目标值的时间,增大Kp会增加相应速度,但可能会造成超调,有静态误差
(2)积分控制(I)
Ek为历史上某一时刻的偏差,Sk为历史偏差之和:Sk=E1+E2+E3+...+EN ①当Sk<0时,表示历史上大部分时间温度未达标(现在是否达标不知道) ②当Sk==0时,表示历史上温度总体上是好的(现在温度是否达标不管) ③当Sk>0时,表示历史上大部分时间温度超标(现在温度是否超标不知道)
积分控制公式:
PWM=Ki*Sk Ki参数的解释:Ki可以理解为一个衰减器或者放大器,主要是用来调整Sk,调整其增益或者说是放大倍数
比例控制的作用:
如果我们把加热器放到一个非常冷的地方对水进行加热,加热目标值是50摄氏度在比例控制下,水温度慢慢升高,直到升高到45摄氏度,发现天气太冷,水散热的速度正好等于比例控制下的加热速度。所以水温永远停留在45摄氏度,永远到不了50摄氏度。如果加上积分控制,只要没有达到50摄氏度,就会存在偏差,这时候对偏差不断积分(累加),输出的PWM就会增大,即增大的加热器的功率,使水温能达到50摄氏度。所以比例控制的作用是,减少静态情况下的误差,但容易造成震荡
(3)微分控制(D)
E(k)为当前偏差值,E(k-1)为上一次偏差值 Dk为最近两次偏差相减,表示最近两个时间点偏差的变化:Dk=E(k)-E(k-1) ①当Dk<0时,表示偏差有增大的趋势 ②当Dk==0时,表示偏差稳定,输出为0 ③当Dk>0时,表示偏差有减小的趋势
微分控制公式:
PWM=Kd*Dk Kd参数的解释:Kd可以理解为一个衰减器或者放大器,主要是用来调整Dk,调整其增益或者说是放大倍数
微分控制的作用:
只要物理量存在变化,微分控制就会起作用,让物理量的变化速度趋于0,增大Kd参数能够抑制震荡,尽快稳定,但有可能造成调节周期过长
(4)PID算法控制代码实现
int PID(int Sv,int Pv)
{
/* Sv:用户设定的目标值
** Pv:传感器检测到的当前值
** Ek:目标值与当前值的偏差值
** last_Ek:上一次的Ek值
** Sk:偏差值Ek的积分值
** PWM:输出的PWM值
*/
static int Ek,last_Ek,Sk;
static float PWM;
Ek=Sv-Pv;
Sk+=Ek;
/*积分限幅,Sk_max和Sk_min根据情况自己给定*/
if(Sk>Sk_max) Sk=Sk_max;
if(SkPWM_max) PWM=PWM_max;
if(PWM
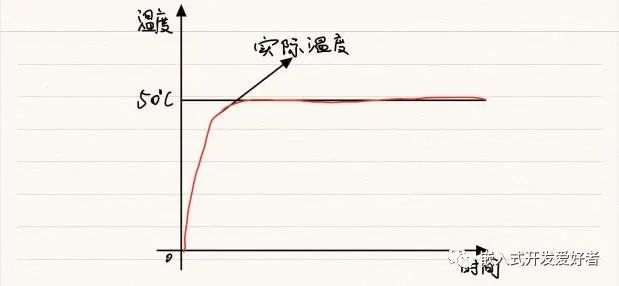
当Ek、Ki和Kp参数参数调节的比较好时,温度能及时达到目标温度并且很平稳如图所示:
三、PID控制参数整定的方法
PID控制的调节经验可以总结为:先只使用 P 控制,增大 P 系数直到系统振荡,然后加入微分控制增大阻尼,消除振荡之后再根据系统对响应和静差等具体要求,调节 P 和 I 参数。
例子:我们需要调节目标值为 10390,当前值为 10000
①先设置Kd和Ki的参数值为0,然后把Kp参数从0逐渐增大,直到出现震荡
当Kp=62,Ki=0,Kd=0时,响应曲线如下:

②保持Kp=62,Ki=0不变,Kd从0逐渐增大,当Kd=188时,响应曲线如下:
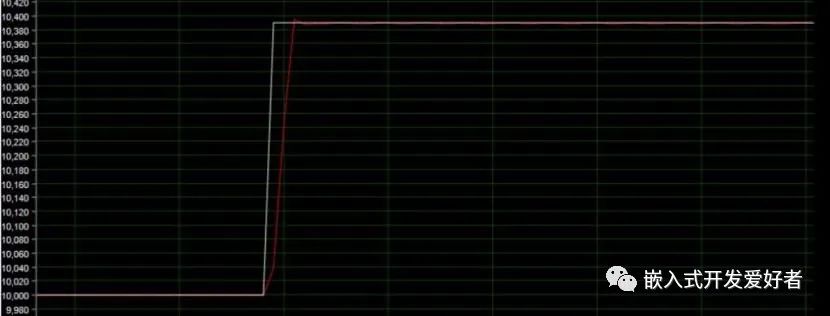
当加入微分控制的时候,可以看到,系统的振荡得到了抑制,但是系统的响应变慢了。因为微分控制相当于一个阻尼力,引入微分控制相当于增大系统的阻尼。这个时候需要结合 KP 和 KI 进行进一步的优化。在实际生产中,需要对不同项目进行评估,比如一个系统对快速性要求不高,但对稳定性和准确性的要求很高,那么就需要严格控制超调量和静差。
总结:PID控制算法是经典控制方法中,现实生活中使用非常广泛,掌握其中的原理非常重要。
审核编辑:汤梓红
-
PID
+关注
关注
38文章
1506浏览量
92143 -
控制算法
+关注
关注
4文章
177浏览量
22867
原文标题:PID控制算法基本原理
文章出处:【微信号:嵌入式开发爱好者,微信公众号:嵌入式开发爱好者】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
蚁群算法基本原理及其应用实例



评论