 科瑞特(CRT)功能实用|编辑简单|直坐标机器人编程案例
科瑞特(CRT)功能实用|编辑简单|直坐标机器人编程案例
CRT-DMC630MF三轴桁架机械手示教系统是基于三轴运动控制器DMC630M的硬件平台,在公司三轴仿形示教系统成熟的技术和广泛的市场应用的基础上,根据市场需求,采纳了广大客户的宝贵意见,并参考国内外高端同类产品的一些功能及优点,经深圳市科瑞特自动化全体同仁的共同努力,推出的一款功能齐全、使用方便灵活的高端运动控制系统。
例程要求:如图1所示:图中立方体为障碍物,加工点不能与之触碰,P1点为取料点,P2点位放料点,首先移动到P1点,取料(OT1为1),延时1000ms,检测是否取到料(IN16),若没有取到料(IN16有效)发出报警信号(OT3),直到解除报警(IN17有效),取到料后抬高到安全位(P3),移动到P4,再移动到放料点P2,放料(OT1为0),移动到P4,移动到P3,检测是否还要取料(IN18),如果IN18有效,移动到P1重复之前动作,如果IN18无效,回原点P5。
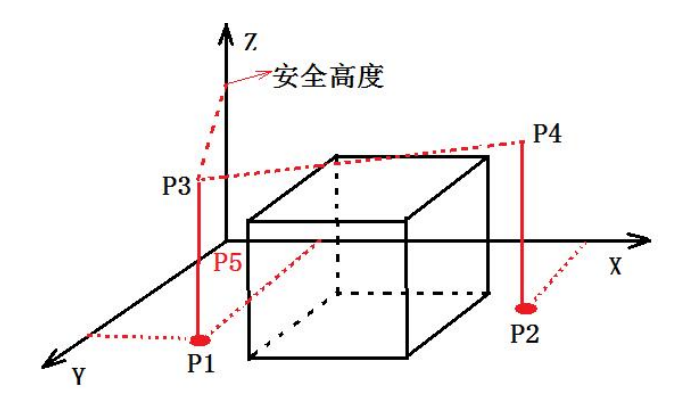
图1
操作步骤如下:
1.用户登录。
2.设置当前工件序号。
3.设计工艺流程:根据例程要求设计工艺流程,具体流程如图2所示。
4.编辑工艺程序:根据工艺流程编辑工艺程序 ,具体的图元指令以及指令对应的参数如 图3所示
5.轨迹采集:按照上一个例程的方法,分别采集点1~5的坐标信息。
6.运行验证:返回到“模式选择”界面,按“3”进入“运行模式”界面,按“F1”运行,然后按控制器上连接的运行按钮,观察运行结果。
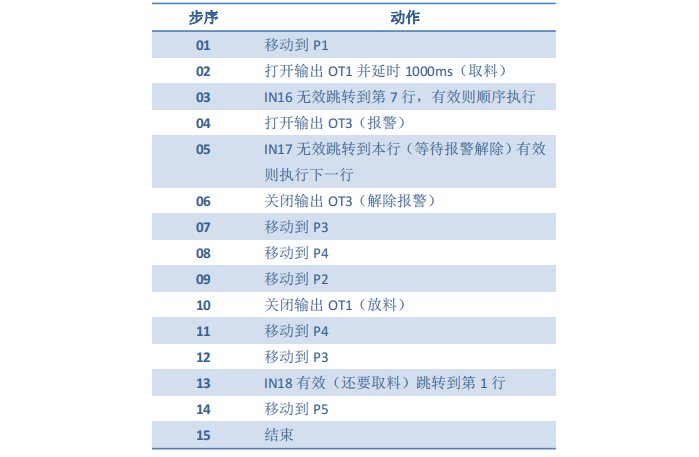
图2
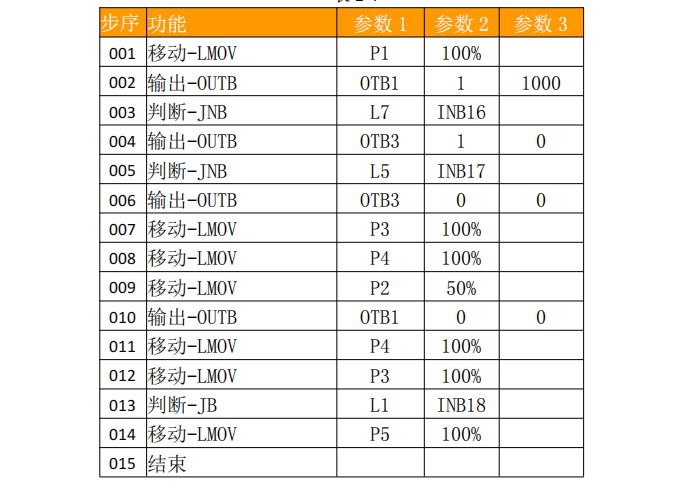
图3

直坐标机器人控制系统
审核编辑 黄昊宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28524浏览量
207532 -
编程
+关注
关注
88文章
3628浏览量
93815
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
需要专业程序员进行繁琐的编程工作,这种方式不仅效率低下,还限制了机器人的应用场景。例如,在我们大学工程实训课程中使用的数控机床,需要人为设定起点、终点、移动方向和移动距离等参数,自动化程度非常有限。而
发表于 12-29 23:04
泰科机器人获奖,开启人形机器人关节模组新动力
泰科机器人携多款产品及解决方案惊喜亮相2024高工人形机器人年会暨高工金球奖颁奖典礼,并凭借深厚的技术积淀和高效可靠的供应链体系荣膺“高工金球奖——2024年度优秀供应链企业”。本次年会上,泰

机器人的语音功能
经典卡通角色的声音成为了它们的“名片”。那么,机器人的语音功能究竟是如何实现的?它与智能模组有什么关系?谁是这类服务机器人的语音“指挥官”?今天我们就来聊一聊机器人的语音
开源项目!用ESP32做一个可爱的无用机器人
简介
作者在完成硕士论文答辩后,利用空闲时间制作了一个他一直想做的机器人——可爱无用机器人。
无用机器人原理是一个连接到开关的电机,通过逻辑门控制。当开关被推到“开”时,
发表于 09-03 09:34
开源项目!用ESP32做一个可爱的无用机器人
简介
作者在完成硕士论文答辩后,利用空闲时间制作了一个他一直想做的机器人——可爱无用机器人。
无用机器人原理是一个连接到开关的电机,通过逻辑门控制。当开关被推到“开”时,
发表于 08-30 14:50
工业机器人的四种编程(示教编程、离线编程、自增强现实编程主编程)剖析!
当前机器人广泛应用于焊接、装配、搬运、喷漆及打磨等领域,任务的复杂程度不断增加,而用户对产品的质量、效率的追求越来越高。在这种形式下,机器人的编程方式、编程效率和质量显得越来越重要。降

abb机器人工具坐标系问题
各位大佬请教一下,abb机器人工具坐标系用四点法,六点法,手动输入等方式标定出的工具坐标系的Z方向与实际工具的长度不符,实际工具长度越长坐标系z方向的差距越大。比如实际工具400mm
发表于 08-07 11:11
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
。
ROS系统主要特点有哪些
(1) 提供丰富的机器人算法库
机器人的各种控制以及通信离不开算法库的支持,ROS系统提供丰富且功能强大的机器人算法库,如
发表于 07-09 11:38
abb工业机器人的编程语言是什么
编程而设计。RAPID语言具有易学易用、功能强大、灵活性高等特点,广泛应用于ABB工业机器人的编程和应用开发。 ABB工业机器人
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
和增强系统处理图像的实时性,本文提出了一种伊瑟特的六自由度机器人视觉伺服控制系统,将摄像头集成到基于 Zynq的伊瑟特主站上,提高了视觉伺服的实时性.经测试,该平台能够对视觉检测目标的变化做出及时的反应
发表于 05-29 16:17
巡检机器人有哪些功能和作用
在科技如此发达的时代,巡检机器人犹如一位不知疲倦的守护者,悄然走进了我们的生活。它们具备着令人惊叹的功能和作用,成为了保障安全、提高效率的重要力量。那么,巡检机器人功能和作用?下面我们
巡检机器人有哪些功能和作用?
在当今的科技时代,各行各业都在不断寻求创新和高效的解决方案。在这个背景下,巡检机器人应运而生,成为了众多领域的新兴力量。那么,巡检机器人有哪些功能和作用呢? 巡检机器人的出现,为我们带






 工商网监
工商网监
评论