 关于右腿驱动电路的探讨
关于右腿驱动电路的探讨
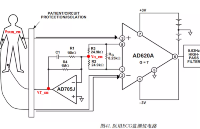
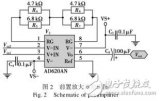
下图是典型的心电放大电路,AD620是3运放仪表放大器,AD705J构成右腿驱动电路, 右腿驱动电路的主要作用是提高共模抑制比 ,减少50Hz或60Hz的工频干扰。
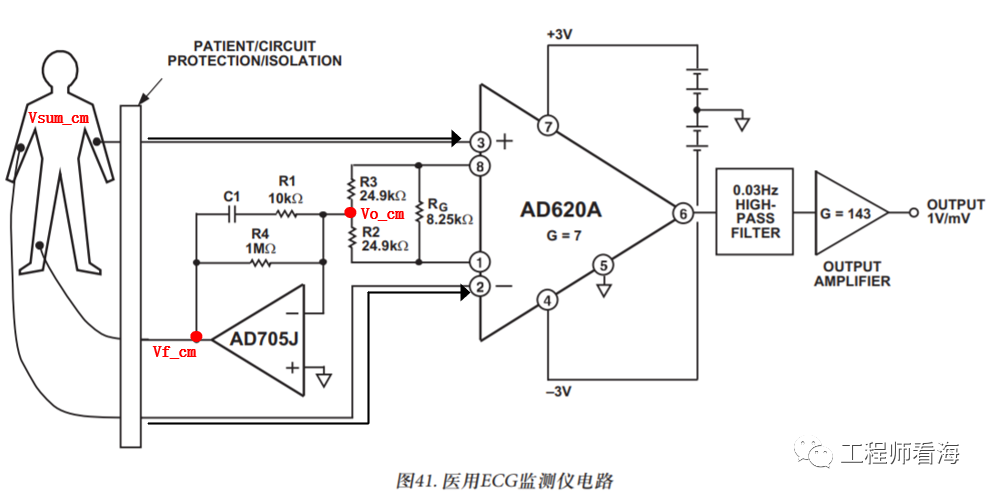
那么右腿驱动电路的原理是怎样的呢?
右腿驱动电路可以简化为下面框图,Vi_cm是输入的共模电压,Vf_cm是反馈回来的电压,Vsum_cm是输入和反馈求和后的电压,Vo_cm是输出的电压,前置仪表放大器对于共模信号而言放大倍数A=1,右腿驱动电路的放大倍数大约几十倍,是反向比例放大。
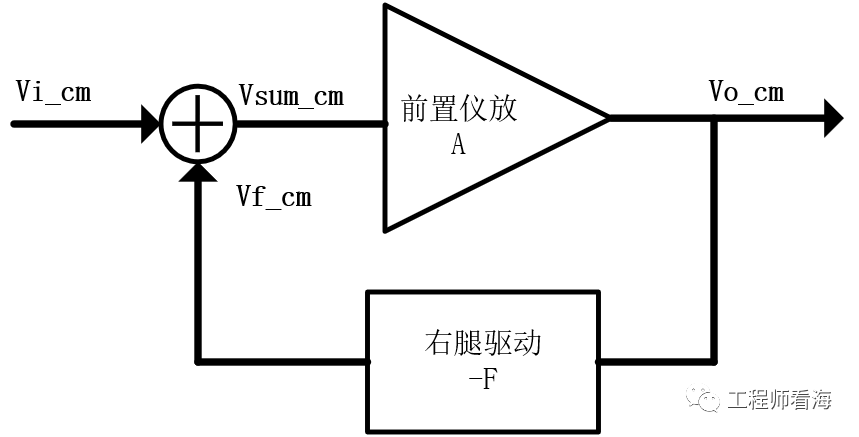
根据上图我们可以得到系统输入输出关系:
Vo_cm = Vsum_cm * A = Vsum_cm
Vsum_cm = Vi_cm + Vf_cm
Vf_cm = -F*Vo_cm
合并上面两个公式得到:
Vo_cm = Vi_cm/ (1 + F)
放大倍数F比较大,因此输入共模电压就被衰减了,Vo_cm会非常小,共模抑制比是差模增益与共模增益的比值,因此共模抑制比就可以提高。
总结来说就是,提取出共模电压,对其进行反向放大,再反馈回人体,人体共模信号叠加这个反向放大的共模信号后就会被抑制。
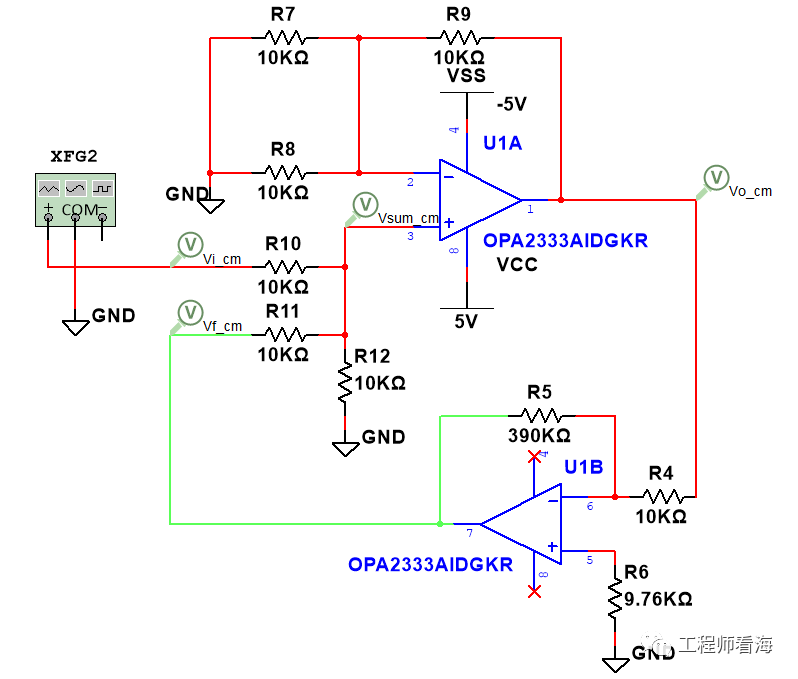
下图是基于multisim的右腿驱动仿真电路图,U1A作为加法器来代替前置仪表放大器(共模增益为1),它的输出Vo_cm = Vi_cm + Vf_cm, U1B是右腿驱动部分,是反向比例放大,放大倍数是-40倍。
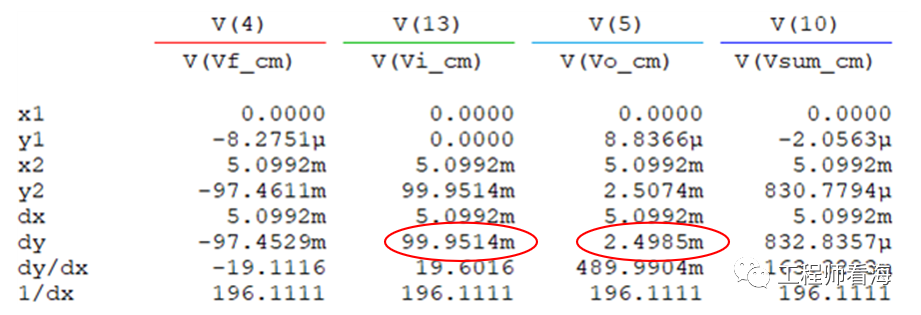
仿真波形见下图,两条浅蓝色的曲线分别是输出、求和后的波形Vo_cm和Vsum_cm,可以看到二者的幅值非常低,接近0电平, 也就是说叠加在人体上的共模电压被有效降低(接近GND,这又是一个有趣的内容,以后会介绍GND相关的内容), 输入的共模信号被很大程度压制下来,从100mV降低到2.5mV。根据前文分析,理论上应该降低为:Vo_cm = Vi_cm/ (1 + F) = 100/41 = 2.439 mV,仿真与理论计算结果一致。
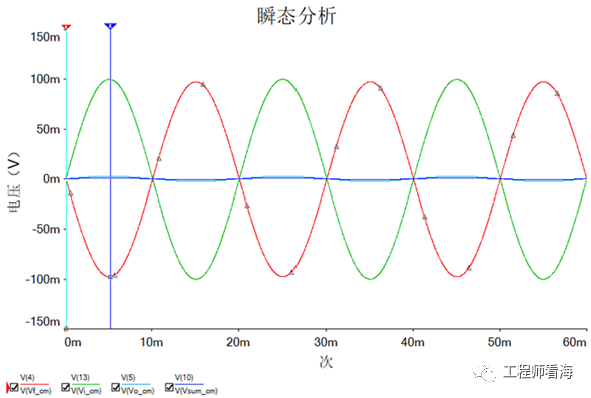
值得一提的是,共模信号只能被抑制,而不能完全被去除, 同时,由于电路不能做到完全对称,所以一部分共模信号还是会转换成差模信号,并且被放大,最终在频谱上出现,因此,有必要增加硬件或软件措施,进一步抑制共模干扰(50Hz工频干扰)。

以上就是关于右腿驱动电路的探讨,你学废了吗?
审核编辑:刘清
-
驱动电路
+关注
关注
153文章
1536浏览量
108809 -
共模抑制比
+关注
关注
3文章
81浏览量
15990 -
运放放大器
+关注
关注
0文章
8浏览量
4067
发布评论请先 登录
相关推荐
右腿驱动电路原理?心电采集必备 带有仿真文件
使用ADS1292R设计心率带电路时,右腿驱动电路要怎么连接最好?有没有参考的接线电路参考?
请问ADS1298右腿驱动怎么接?
ADS1298寄存器CHnSET中的MUX[2:0]设置为000,则表示右腿驱动无输入,即右腿驱动无效?
关于ads1298的右腿驱动部分,有一个右腿驱动参考电压,请问这个参考电压的作用是什么啊,是由什么决定的呢?
请问AD623能否在反馈电阻端直接加上右腿驱动电路?
将差分放大电路、右腿驱动电路应用于电信号放大器的设计





 工商网监
工商网监
评论