 用HLS实现PID控制器
用HLS实现PID控制器

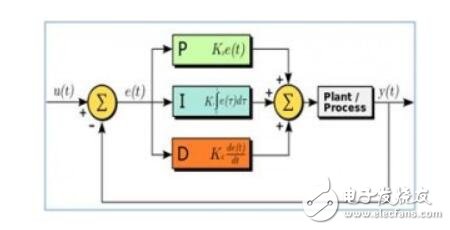
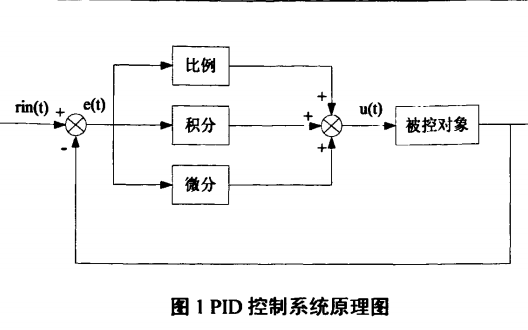
PID控制器(比例-积分-微分控制器),由比例单元(Proportional)、积分单元(Integral)和微分单元(Derivative)构成,可以通过调整这三个单元的增益来调整其特性,如下图所示。PID控制器主要适用于基本上线性且动态特性不随时间变化的系统。
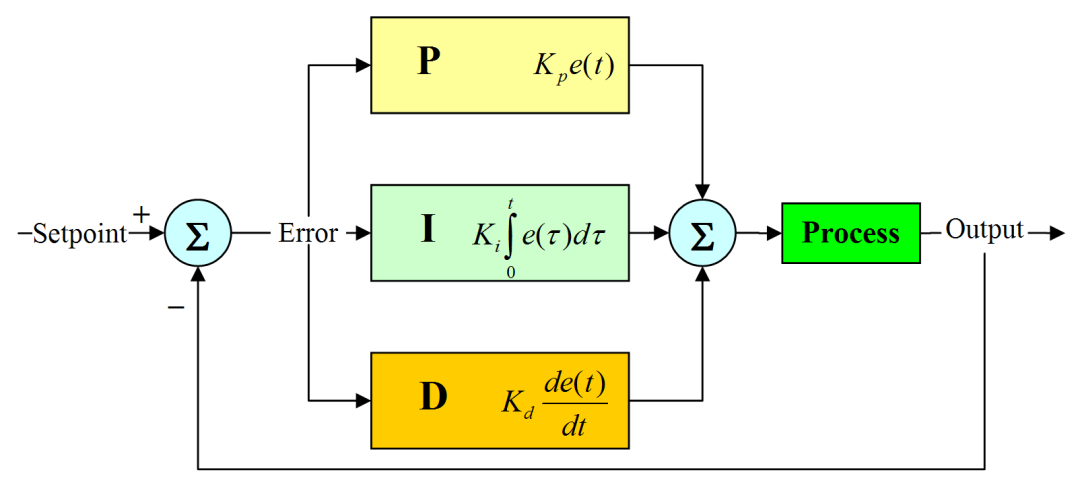
不难看出,PID控制器是一个带有反馈支路的闭环系统,这个控制器把收集到的数据和一个参考值进行比较,然后根据此误差值计算新的输入值。这个新的输入值的目的是让系统的输出数据达到或者保持在参考值。PID控制器可以根据历史数据和误差的出现率来调整输入值,使系统更加准确而稳定。
从编程角度而言,我们需要知道参考值、初始输出值、比例单元增益、积分单元增益和微分单元增益。但这还不够,毕竟上图显示的是一个模拟系统而非离散化的数字系统。接下来我们看看如何对其进行离散化处理。
比例控制单元
比例控制单元是PID控制器中最简单的部分,通过一个乘法操作即可完成。其物理意义在于“稳”,即稳定性,放大控制作用,表征的是粗调跟进以快速地响应被控对象和输入的线性关系。
积分控制单元
如果仅用比例控制单元,那么系统就会出现稳态误差,因此,我们引入了积分控制单元。积分控制单元的传递函数可表示为(在z域)
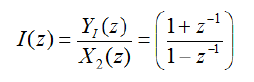
由此可得输出和输入的时域表达式为

不难看出,积分的离散化实质上就是累加。从物理角度而言,积分控制单元对于“准”,其目的是消除稳态误差。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制器
+关注
关注
114文章
17879浏览量
195162 -
PID
+关注
关注
38文章
1505浏览量
91909 -
HLS
+关注
关注
1文章
135浏览量
25982
原文标题:用HLS实现PID控制器
文章出处:【微信号:Lauren_FPGA,微信公众号:FPGA技术驿站】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
基于FPGA的模糊PID控制器的设计实现
本文主要详解基于FPGA的模糊PID控制器的设计实现,首先介绍了FPGA工作原理、基本特点以及FPGA的优势,其次阐述了使用Altera的FPGA设计实现的数字模糊
基于MBP算法的PID控制器设计
针对一般BP 算法存在的不足,提出一种改进的BP 算法,并将其应用于PID 控制器的参数设计中,并且克服了常规的PID 控制器参数整定的费时性,用
发表于 08-07 09:42
•18次下载


PID控制的理论和PID控制器设计的及PID控制器参数整定的以及分析
PID控制作为一种经典的控制方法而广泛应用于工业控制中,是实际工业生产过程正常运行的基本保障。随着计算机技术的飞跃发展和人工智能技术渗透到自动控制
发表于 12-04 08:00
•28次下载



评论