 基于结构光的高精度开源三维重建系统
基于结构光的高精度开源三维重建系统
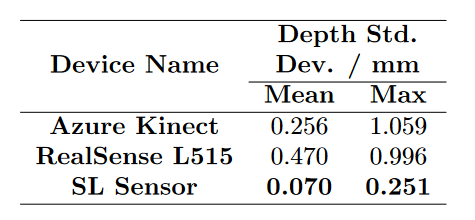
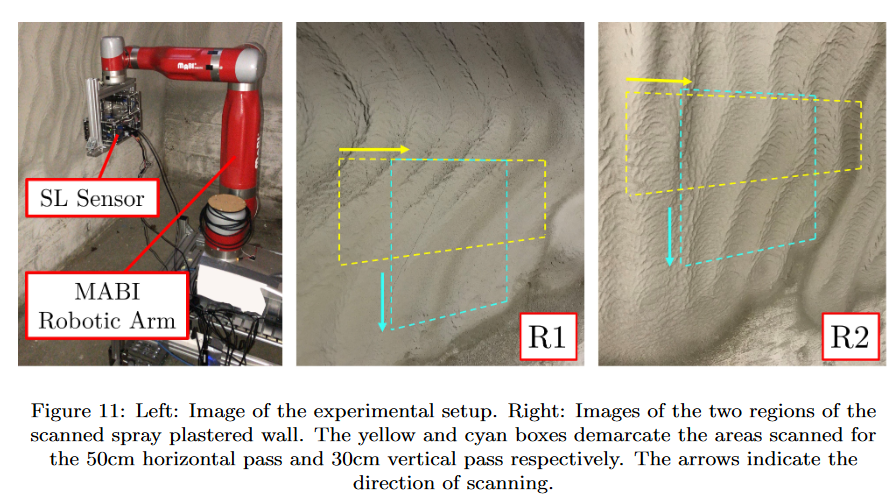
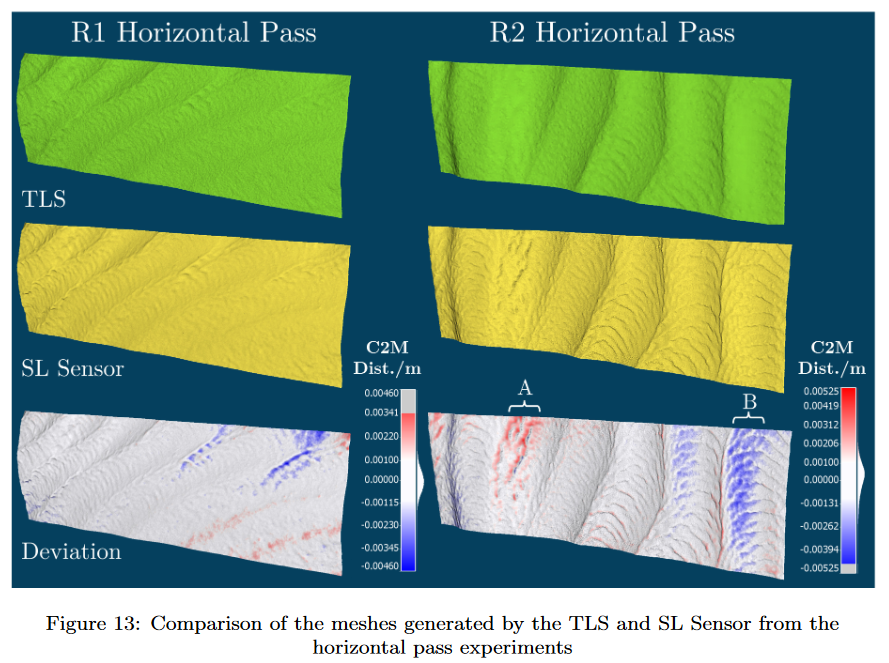
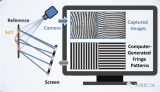
许多面向建筑领域的机器人作业都需要获得高精度的三维表面信息以完成类似于自动水泥抛光汇总石膏喷涂等作业。然而,目前在市场上消费级深度相机并不能满足其毫米级的精度要求。本文中提出了一个基于结构光的解决方案SL sensor,能够达到5hz的发布频率的同时生成高保真的点云(基于PSP方法)。通过与其他深度相机的实验-Azure Kinetic和RealSencse L515,验证了其在精度和准确度方面均有较好的优势。为了使SL Sensor成为机器人应用实验平台,我们为其添加了一个运动补偿机制使得其能够在线性运动期间也能够正常工作(传统PSP方法仅在静态环境下能够使用)。通过场景实验表明SL Sensor 能够重建出高精度的石灰喷涂表面。
系统介绍
(一)硬件系统
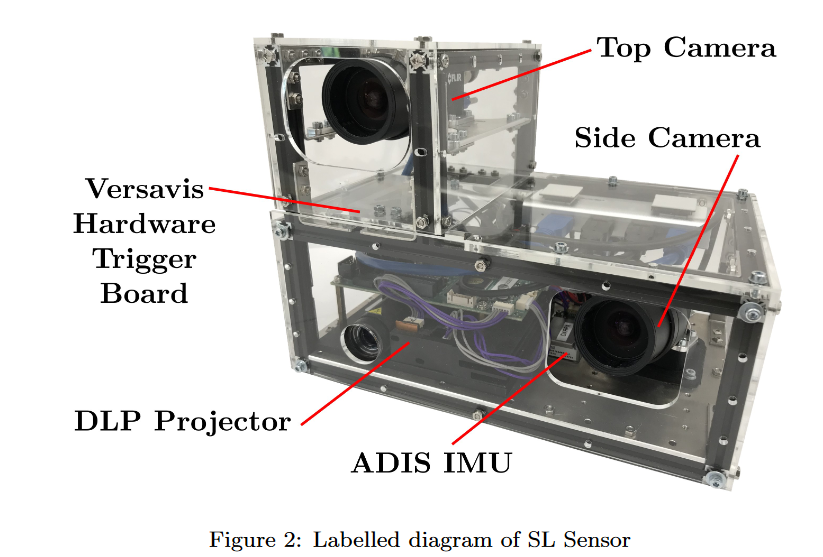
硬件系统结构 硬件系统包含两个工业CMOS彩色摄像头(1440×1080)和一个DLP投影仪(912×1140)。摄像机和投影仪是由Versavis板完成触发与时间同步。另外额外的IMU为未来的运动补偿策略做准备。其测量范围为设备前方0.3-1.0m的区域。
(二)软件系统
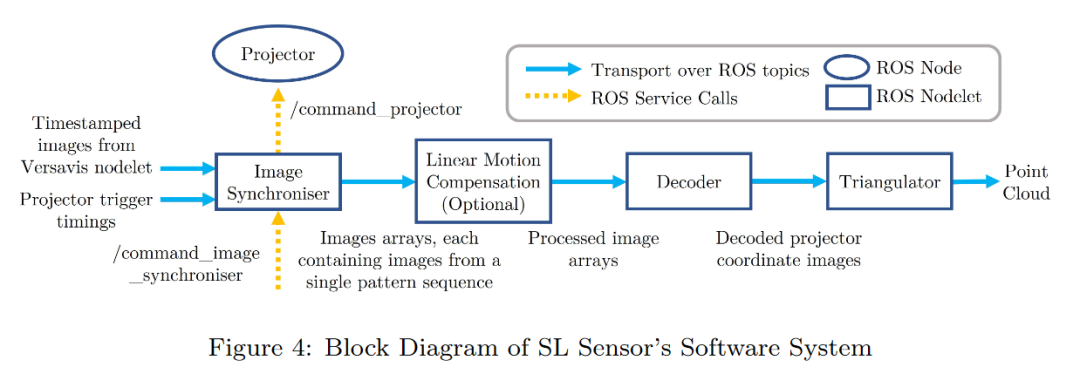
软件系统结构 软件系统在机器人操作系统(ROS)的框架规范下编写,这确保了它可以轻松地与其他ROS社区的功能组件完成交互与集成。 整个三维重建流程分为四个节点,其在较有效率的零拷贝指针来传递进程之间的图像的同时保证了各个部分的模块性。部分Decoder与Triangular节点继承了SLStudio中的代码。
分析评估
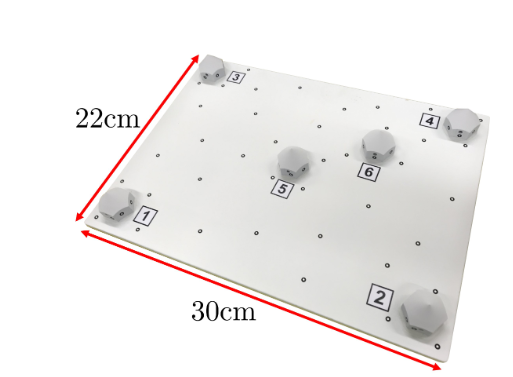
(一)静态精度测试


(二)运动滑轨实验
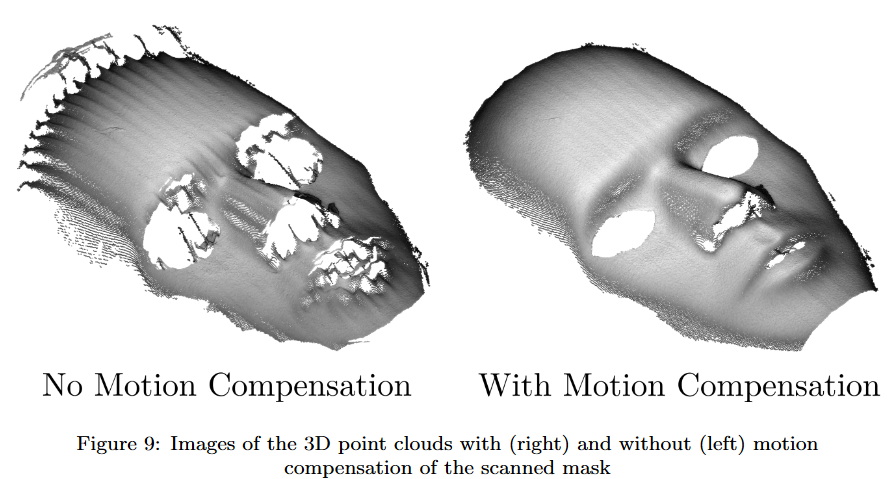
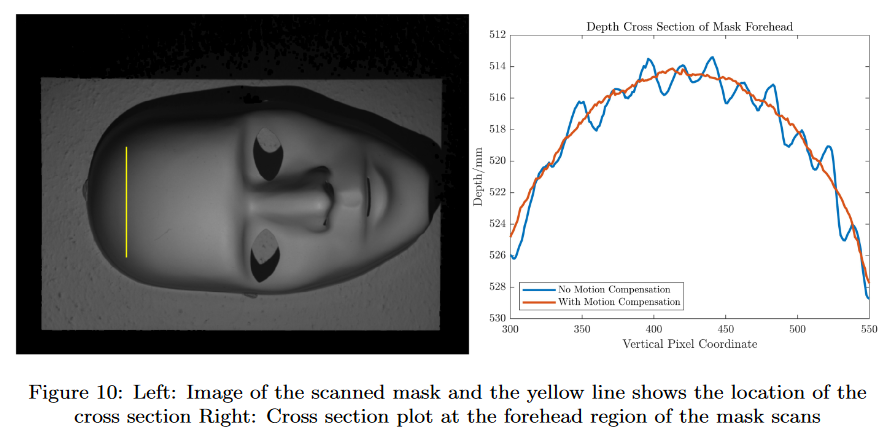
(三)喷涂场景实验


总结
在这项工作中,我们提出了一种结构光三维重建解决方案。与现有传感器解决方案相比,我们的SL Sensor集成了ROS中间件框架上的现有机器人软件,以定制化实现3D扫描。我们分别介绍了了软件架构、硬件设置和校准程序,并验证传感器达到毫米级精度。我们将其与常用的传感器进行了比较,实验结构表明我们的传感器达到了精细化施工应用的精度要求。之后我们验证了我们的运动补偿策略的有效性-在线性运动下高精度PSP扫描,并展示了我们的传感器在真实环境运动下根据实际情况进行模式切换的能力。未来的工作将扩展SL Sensor的扫描能力由线性运动到任意6自由度运动。可能的解决方案包括更稳健的运动补偿策略或自适应模式投影,当传感器处于静态并切换到当检测到运动时,另一种模式更能适应运动场景。此外,可能研究多方法点云配准以减少扫描过程中的错误积累,以获得更准确的点云合并结果。
审核编辑:郭婷
-
机器人
+关注
关注
211文章
28418浏览量
207096 -
摄像机
+关注
关注
3文章
1601浏览量
60044 -
投影仪
+关注
关注
4文章
879浏览量
43263
原文标题:SL-Sensor:基于结构光的高精度开源三维重建系统(arxiv2022)
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
商汤科技运用AI大模型实现实景三维重建
CASAIM与迈普医学达成合作,三维扫描技术助力医疗辅具实现高精度三维建模和偏差比对
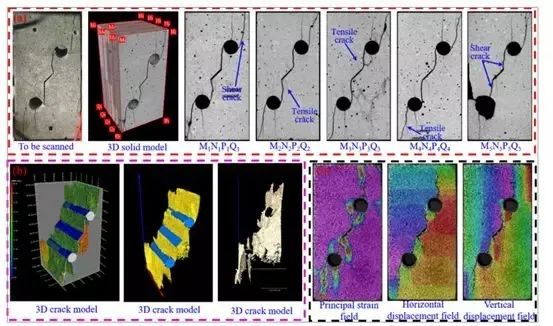
建筑物边缘感知和边缘融合的多视图立体三维重建方法

留形科技借助NVIDIA平台提供高效精确的三维重建解决方案
基于大模型的仿真系统研究一——三维重建大模型

基于三维激光扫描技术的XKCON祥控激光盘煤仪可高精度、快速、全覆盖盘煤,相对精度优于0.5‰
泰来三维|三维扫描服务_三维扫描助力园区改造公园

三维扫描与3D打印在法医头骨重建中的突破性应用
奥比中光与创想三维联合打造的高精度3D扫描仪正式发布
三维扫描助力雕刻行业发展

泰来三维| 高精度三维扫描技术助力地质标本资源数字化
泰来三维|文物三维扫描,文物三维模型怎样制作

泰来三维| 高精度工业3D扫描助力模具检测和逆向设计“数字化”发展

珠三角矿山机械设备三维扫描、逆向3d建模抄数设计

工业上常见的高精度主动式重建算法





 工商网监
工商网监
评论