 ARINC 818解决棘手的传感器融合问题
ARINC 818解决棘手的传感器融合问题
传感器融合系统在监视、目标跟踪和导弹防御等军事应用中继续激增,但它们也带来了传感器同步、布线重量、距离限制和 EMI 等系统级挑战。作者讨论了如何将ARINC 818(航空电子数字视频总线)用作灵活的传感器接口来解决这些系统级问题。此外,还描述了一种双向ARINC 818系统架构方案,用于将多个传感器时间复用到单根光纤上,并实现传感器命令和控制的返回路径。
随着传感器融合系统在增强视觉、监视、目标跟踪和导弹防御等应用中的激增,从传感器吊舱远程执行处理时存在许多系统级挑战,包括:传感器同步、布线重量、距离限制和 EMI。ARINC 818协议已广泛用于驾驶舱显示器等航空航天视频系统,可用作灵活的传感器接口来解决这些系统级问题。介绍了一种双向ARINC 818系统架构,包括将多个传感器时间复用到单根光纤上并实现传感器命令和控制的返回路径的方案。
ARINC 818协议概述
ARINC 818相对较新,许多工程师还不熟悉该协议。在描述如何在传感器融合系统中使用 ARINC 818 之前,对该协议的概述将有助于讨论。
该标准名为航空电子数字视频总线(ADVB),基于光纤通道音频视频(FC-AV)标准,是对光纤通道的改编,增加了视频传输功能。但是,FC-AV标准旨在支持非常广泛的行业和应用,而ADVB则专注于航空电子视频的关键需求。ADVB 从 FC-AV 简化而来,无需链路初始化、流量控制或其他光纤通道交换(如端口登录)。ADVB 被定义为单向链路,虽然经过简化,但 ADVB 保留了光纤通道的属性,这些属性有利于任务关键型视频应用,例如高速、高可靠性、低延迟和灵活性。
此外,ARINC 818 是一种点对点 8B/10B 编码协议,用于视频和数据的串行传输。该协议是分组的,以视频为中心,并且非常灵活,支持一系列复杂的视频实现,包括将多个视频流多路复用到单个链路上。ARINC 818 和 FC-AV 定义了从 1 Gbps 到 8 Gbps 的链路速度,带宽高达 800 MBps,可满足最苛刻的传感器融合应用。
ADVB 数据包结构
图 1 所示的 ADVB 框架是 ARINC 818 的基本传输机制。将这些数据包称为“ADVB 帧”而不是简单地称为“帧”非常重要,以消除与视频帧的潜在混淆。
图1:ADVB 帧是 ARINC 818 的基本传输机制。

ADVB 帧的开始由帧开始 (SOF) 4 字节有序集发出信号,并以帧结束 (EOF) 有序集终止。每个 ADVB 帧都有一个由六个 32 位字组成的标准光纤通道标头。这些标头字与 ADVB 帧原点和预期目标以及序列中的 ADVB 帧位置等内容有关。ADVB 帧标头中的源 ID (SID) 字段允许将来自每个传感器的视频与其他传感器区分开来。
“有效负载”包含视频、视频参数或辅助数据。有效负载的大小可以有所不同,但限制为每个 ADVB 帧 2,112 字节。为了确保数据完整性,所有ADVB帧都具有针对SOF和CRC字之间的数据计算的32位循环冗余校验(CRC)。CRC 与为光纤通道定义的 32 位多项式计算相同。
ADVB容器结构
ARINC 818规范将“容器”定义为一组用于传输视频的ADVB帧。换句话说,视频图像和数据被封装到跨越许多ADVB帧的“容器”中。每个ADVB帧的“有效载荷”包含数据或视频。在容器中,ARINC 818 定义了包含某些类型数据的“对象”。也就是说,容器中的某些 ADVB 帧是对象的一部分。在容器中找到的四种类型的对象如表 1 所示。
表 1:容器中的 ADVB 帧是对象的一部分,容器内有四种类型的对象。
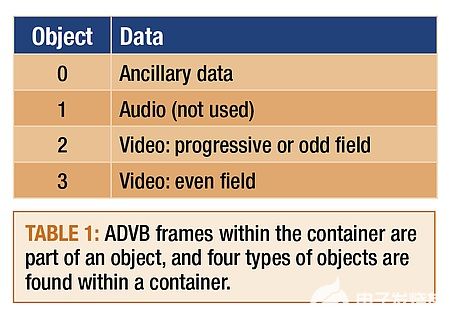
在大多数情况下,单个容器精确映射到单个视频帧。一个示例将阐明如何传输视频:要传输 XGA 视频帧(1,024 x 768,24 位颜色),ARINC 818 将总共使用 1,537 个 ADVB 帧。第一个 ADVB 帧的有效负载保存容器标头信息和辅助数据;接下来是 1,536 个 ADVB 帧,其中每个 ADVB 帧的有效负载包含半行视频。
ARINC 818 传感器融合接口架构
图2显示了与三个传感器接口的架构。传感器接口模块与传感器位于同一位置,用于将来自三个传感器的视频多路复用到单个ADVB链路上。在此示例中,有两个红外传感器,每个传感器每像素 14 位,分辨率为 640 x 512,频率为 60 Hz,还有一个 1,024 x 768 的 24 位彩色光学传感器。这些传感器总共需要 220 MBps 的吞吐量,并且可以多路复用到单个 3.1875 Gbps ARINC 818 链路上。
图2:传感器接口模块与传感器位于同一位置,用于将来自三个传感器的视频多路复用到单个ADVB链路上。
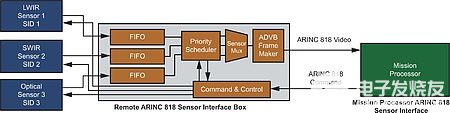
该架构包括来自接收器的 ARINC 818 命令和控制路径。在示例中,命令和控制路径显示为ARINC 818,但如果不需要像ARINC 818这样的高速总线,则可以使用RS-422或类似的数据总线来实现。在此示例中,ARINC 818 (3.187 Gbps) 比 RS-422 (10 Mbps) 快 300 倍以上。
传感器还可以具有 ARINC 818 接口。可以使用 COTS 转换器板(例如,RS-170 至 ARINC 818)或在 FPGA 中实现的 ARINC 818 IP 核将 ARINC 818 接口设计到传感器中。
将视频定时多路复用到单个链路上
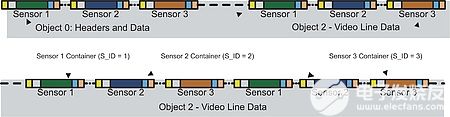
ARINC 818 基于网络协议构建,其中数据包标头 ID 允许将多个传感器多路复用到单个光纤上。在单根光纤上多路复用可减少电缆和连接器的数量,从而减轻重量。ADVB 标头中的源 ID 字段用于区分来自不同传感器的视频或数据。在我们的示例中,SID=1 是 LW 红外传感器,SID=2 是 SW IR 传感器,SID=3 是光学传感器。图3显示了ADVB帧中的分组视频线如何在链路上交错。
图3:ADVB 帧中的分组视频线在链路上交错。
命令和控制界面
ARINC 818的主要重点是驾驶舱视频连接,该标准仅定义了单向链路。但是,可以在相反的方向上添加第二个链接以进行命令和控制。作为命令和控制链路,对象 0 中的辅助数据字段用于小数据包(如同步脉冲),而对象 2 或 3 用于发送“图像大小”数据,例如坏像素替换图或非均匀性校正 (NUC) 增益和偏移值。命令和控制链路的更新速率可能比视频链路快或慢。
通过命令和控制链路发送的典型参数可能包括:积分时间、同步信号、NUC、传感器模式(待机、BIT或正常)、测试码型、坏像素替换、读取温度、像素增益/偏移数据以及校准和测试码型数据。这些参数是 ADVB 帧的有效负载,根据数据类型插入到命令和控制链路上的对象 0、2 或 3 中。
ARINC 818:解决系统级问题
现在,我们将研究ARINC 818缓解的四个系统级挑战:视频同步以及重量、距离和EMI。
视频同步
由于传感器吊舱远离融合引擎,复杂图像融合处理的第一步需要图像的时间同步。目前的方法涉及缓冲来自每个传感器的多个图像帧,以便图像处理算法可以将正确的时间偏移应用于存储的数据。但是,缓冲多个视频帧会产生大约 16 毫秒到 48 毫秒的延迟,这对于平视显示器 (HUD) 起飞和着陆辅助等时间关键型应用的严格延迟预算来说可能太多了。
相比之下,ARINC 818返回链路提供了一种同步锁相传感器的方法,因此接收的图像数据在时间上将非常紧密地相关。例如,传感器接口块可以使用 OBJ 0 帧的到达作为传感器的同步锁相触发器。这可以像在检测到每个 SOFi 时发送同步锁相同步脉冲一样简单。(SOFi 是序列中的第一个 SOF。但更有可能的是,对于使用具有不同内部延迟(微秒到毫秒)的异构传感器的增强视觉应用,传感器接口盒命令和控制将需要对传感器触发器应用独立的延迟。触发延迟值可以包含在ARINC 818返回链路数据中,从而允许接收器直接控制输入传感器图像之间的偏斜。触发延迟可以在启动校准期间设置,如果需要,可以实时更改。这种系统级方法可以使传感器图像在时间上非常紧密地相关,从而消除了接收器缓冲多个完整图像的负担。更重要的是,这种方法将延迟贡献从全帧时间(10 毫秒)减少到行时间(100 微秒)。
重量、距离和电磁干扰
除了视频同步,ARINC 818在重量、距离和EMI方面也有很多优势。首先,ARINC 818光纤实施显著减轻了系统的重量。例如,如果传感器吊舱距离图像处理15米,并且使用典型的铜接口,则将有三组同轴电缆传输视频信号,三组双绞屏蔽电缆来传输RS-422等命令和控制信号。航空航天级同轴电缆的电缆重量为15 g/m,扭曲屏蔽为20 g/m。电缆总重量为 1,575 克。ARINC 818系统将包括一个重达380克的传感器接口盒和一个重15克/米的双光纤电缆,总重量为605克,重量减轻62%。(连接器不包括在计算中,因为可以使用各种各样的连接器。
由于ARINC 818使用单模(最远10公里)或多模(500米)光纤,因此距离通常不是问题。与CameraLink上的10 M限制或IEEE 1394(Firewire)或DVI上的5 M限制相比,即使是铜缆上的ARINC 818也更胜一筹,在1 Gbps时的距离为25 M,在2 Gbps时的距离为15 M。大多数商业和军事航空航天应用在多模光纤上使用ARINC 818。光纤布线的另一个优点是抗EMI,它消除了所有铜缆固有的屏蔽需求 使用光纤进行ARINC 818等高频传输消除了干扰其他电子设备的辐射发射和降低数据完整性的EMI敏感性问题。
ARINC 818 有利于现代传感器融合系统
在传感器远离传感器融合引擎的传感器融合系统中,ARINC 818 在同步、带宽、重量、距离和 EMI 抗扰度方面具有优势。接口转换器和ARINC 818 IP 核等 COTS 组件有助于在要求苛刻的传感器融合应用中实施 ARINC 818。
审核编辑:郭婷
-
传感器
+关注
关注
2550文章
51065浏览量
753296 -
接口
+关注
关注
33文章
8586浏览量
151091 -
光纤
+关注
关注
19文章
3915浏览量
73161
发布评论请先 登录
相关推荐
多传感器融合在自动驾驶中的应用趋势探究

自主移动机器人如何实现传感器融合
MSP430F5xx系列上使用方向余弦矩阵算法的九轴传感器融合

精密制造的革新:光谱共焦传感器与工业视觉相机的融合
车载传感器主要有哪些传感器

传感器融合如何使 AMR 在工厂车间内高效移动
未来已来,多传感器融合感知是自动驾驶破局的关键
传感器融合的工作原理
Cadence扩充Tensilica IP产品阵容,强化汽车传感器融合计算能力
深度解析:多传感器融合SLAM技术全景剖析






 工商网监
工商网监
评论