 倍福PLC学习:编写函数块及简单调试
倍福PLC学习:编写函数块及简单调试
今天这篇文章我们来编写一个简单的电机控制函数块,并将其下载到倍福CX5020控制器进行测试,以熟悉TwinCAT3环境下基本的编程步骤。
打开TwinCAT3(TC3),按照上一篇文章《倍福PLC学习:扫描EtherCAT I/O子站并测试模块》介绍的内容新建工程项目并扫描EtherCAT子站,项目名称为“motorControl”。
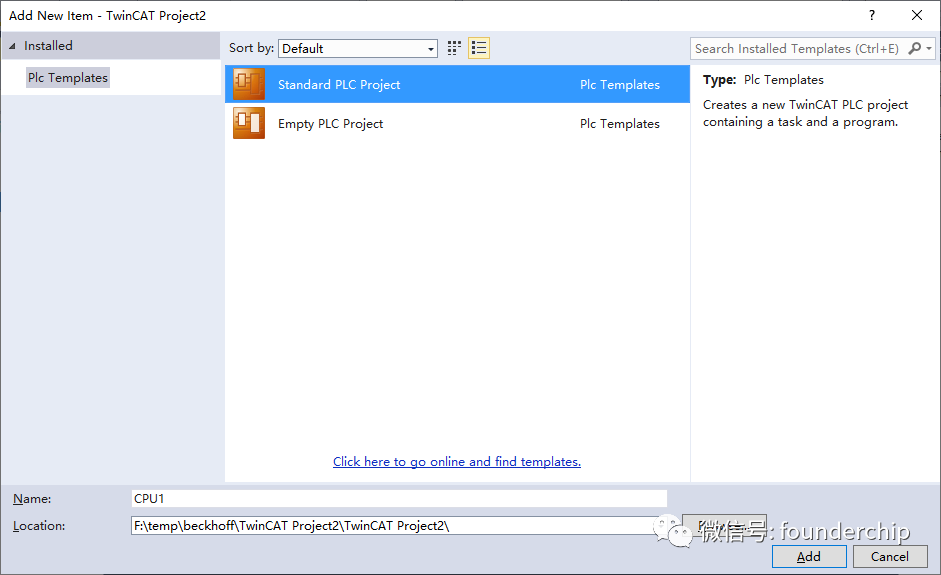
在左侧项目树的“PLC”节点下右键单击,选择“Add new item(添加新内容)”,添加新的PLC项目,命名为“CPU1”,如下图所示:
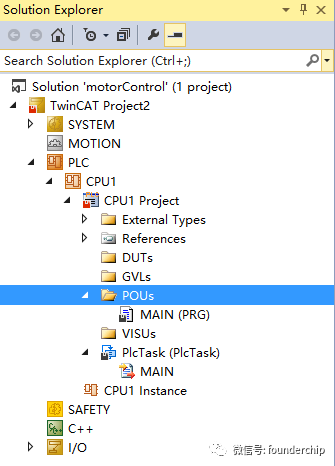
添加完成后,“CPU1 Project”中会有POUs、GVLs、DUTs等文件夹。其中,POU是程序组织单元,GVL是全局变量列表,UDT是用户自定义变量。我们计划编写一个电机控制的函数块,因此在“POUs”文件夹右键单击,在弹出的对话框中选择“添加(Add)”→“POUs”,如下图所示:
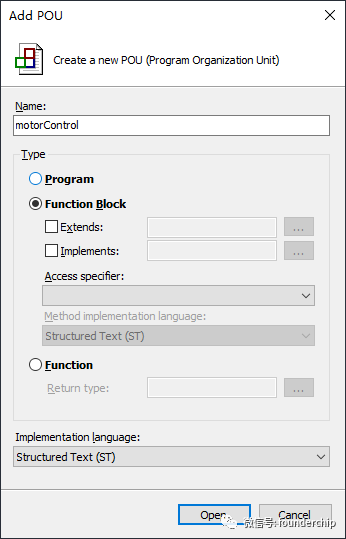
在弹出的“添加POU”对话框中,选择功能块(Function Block),命名为motorControl,编程语言选择ST语言,如下图所示:
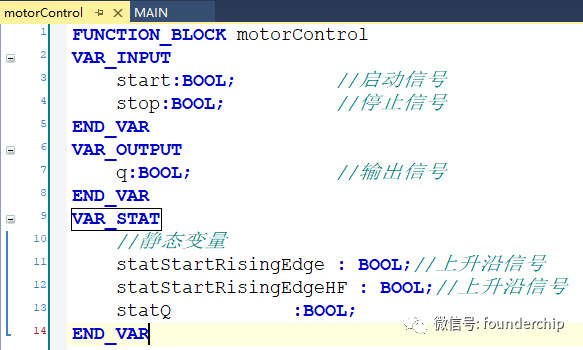
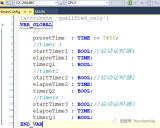
在函数块motorControl中声明变量,其中:
VAR_INPUT是输入变量,包含电机启动 、停止信号;
VAR_OUTPUT是输出变量,包含输出信号(线圈);
VAR_STAT是静态变量,包含沿信号检测变量;
如下图所示(注意变量不区分大小写):
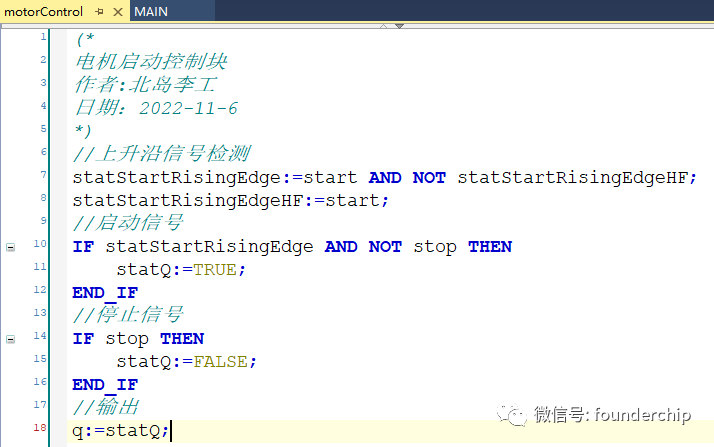
编写代码如下图所示:
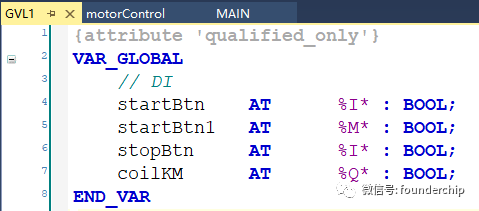
为了分配参数,我们新建全局变量列表:GVL1,并添加变量如下图所示:
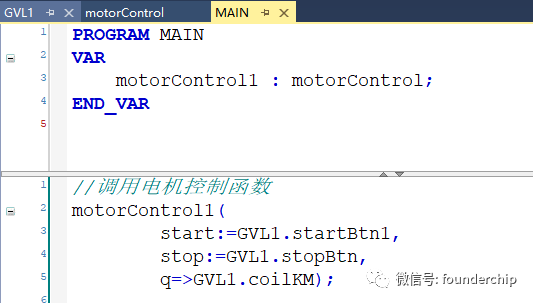
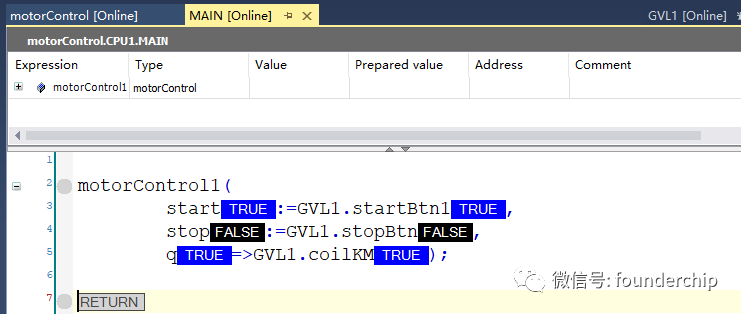
接下来要在主函数(MAIN)中调用电机控制函数块。首先在变量列表中声明motorControl的实例,命名为“motorControl1”,编写控制代码如下图所示:
单击工具栏“Build”→“Build CPU1”编译PLC程序。
单击工具栏“PLC”→“Download”下载PLC程序。
单击工具栏“PLC”→“Login”登录到在线状态,或者工具栏的快捷按钮,如下图所示:


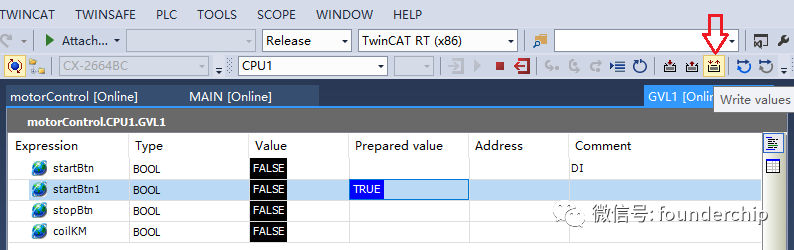
如果PLC处于未运行状态,单击“Start(启动)”使其运行。本例程为了给出电机启动信号,我们将全局变量“startBtn1”的“Prepared Value”设置为“TRUE”,并单击工具栏“Write Values”按钮将该值写入到PLC中,如下图所示:
此时可以看到主程序MAIN中电机输出信号为TRUE,如下图所示:
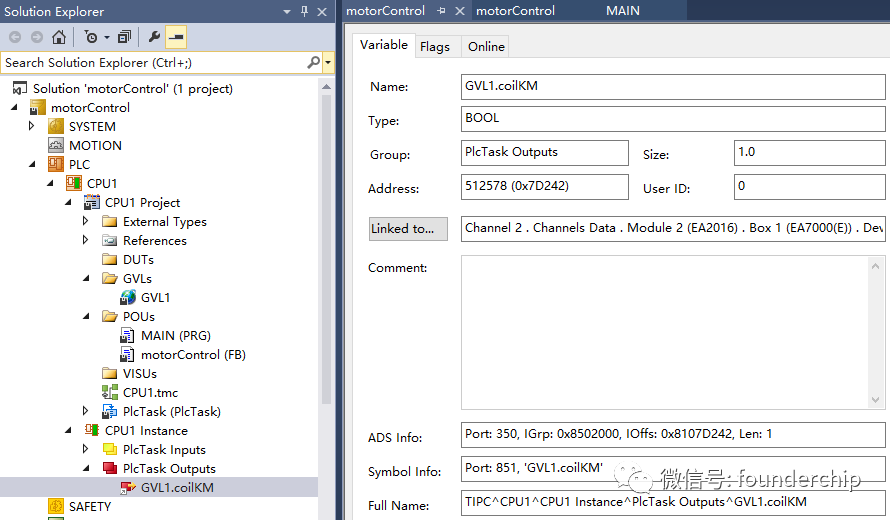
如果想让函数输出对应到实际的输出模块,在“CPU 1 instance”→“PLCTask Outputs”→“GVL1.coilKM”,将其对应到“Linked to”指定的输出模块即可。
好了,关于倍福PLC编写函数块及简单调试就先介绍到这里。
审核编辑:汤梓红
-
电机控制
+关注
关注
3522文章
1848浏览量
268093 -
plc
+关注
关注
5006文章
13093浏览量
461310 -
函数
+关注
关注
3文章
4276浏览量
62303
原文标题:倍福PLC学习:编写函数块及简单调试
文章出处:【微信号:方正智芯,微信公众号:方正智芯】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
如何查看及更改函数/函数块的调用环境

倍福PLC数据 转 CCLink IE Field Basic项目案例
倍福 plc怎么与labview 实现mudbus tcp 协议通讯

倍福BECKHOFF PLC:自动化编程入门

倍福PLC中定时器的使用
EtherCAT转Profinet协议网关使西门子和倍福的PLC实现通讯的方法
倍福PLC如何实现远程编程调试和远程上下载程序







 工商网监
工商网监
评论