 激光稳定系统中如何实现光路的闭环控制?
激光稳定系统中如何实现光路的闭环控制?

激光稳定系统可用于抵消或纠正由外部振动或其他因素引起的光路变化。在成像、光通信等应用中起着至关重要的作用。最常用的方法是采用电学反馈回路,例如PI或PID类型。电光调制器可用来控制功率,且伺服系统带宽很高。合理设计反馈电路对于实现在大带宽范围内有效抑制噪声非常重要。
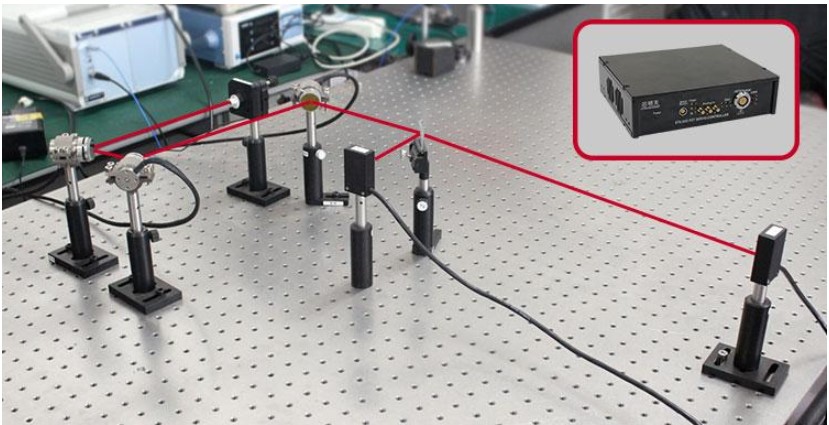
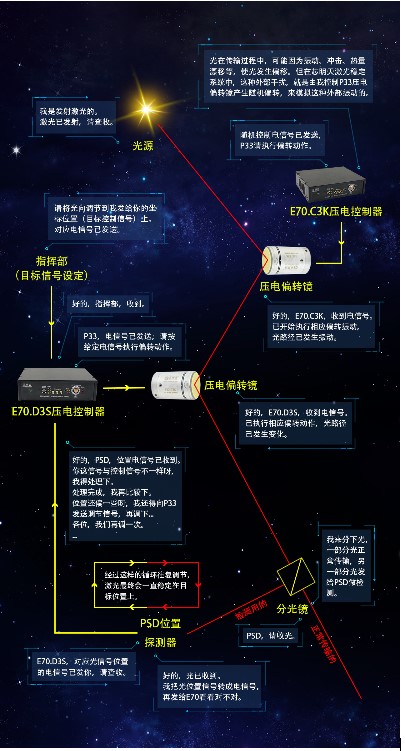
为了使得激光在传输过程中稳定,芯明天利用压电偏转镜搭建了一阶与二阶的激光稳定系统。该激光稳定系统是采用外部PSD位置探测器进行闭环的压电式激光偏转稳定系统,预先设定了光束接收的目标位置坐标,光源通过干扰压电偏转镜、补偿压电偏转镜的反射后,到达PSD位置探测器。其中,干扰压电偏转镜就是为了模拟外界干扰的。
可根据光源的不同而选择合适的系统,一阶激光稳定系统适用于定位,而二阶系统适用于定向。例如平行光,采用一阶激光稳定系统即可;而点光源,因其光斑的位置会有偏移,需要额外的位置校正,则需要二阶激光稳定系统来调节。两种系统结构图分别如下所示。
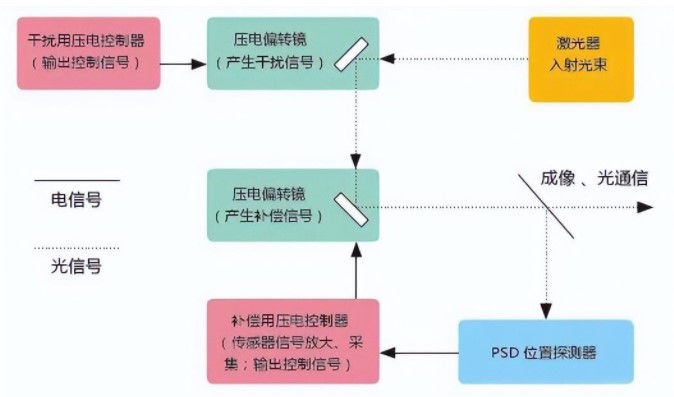
采用外部PSD位置探测器的一阶快速压电偏转系统原理图
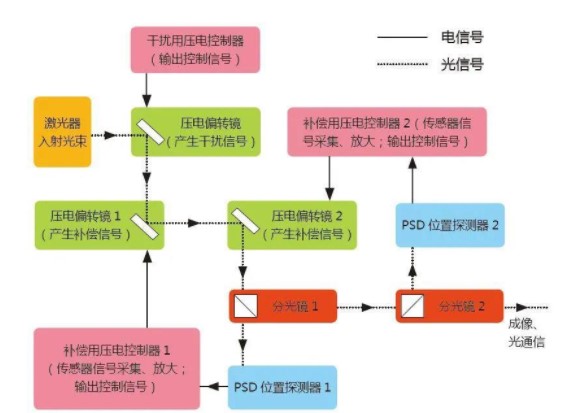
采用外部PSD位置探测器的二阶快速压电偏转系统原理图
在上述原理图中,补偿用压电控制器是如何实现闭环控制补偿光路偏差的呢?
闭环控制过程
在该激光稳定系统中,闭环控制是通过芯明天压电控制器配合外部PSD位置探测器模块来完成的。
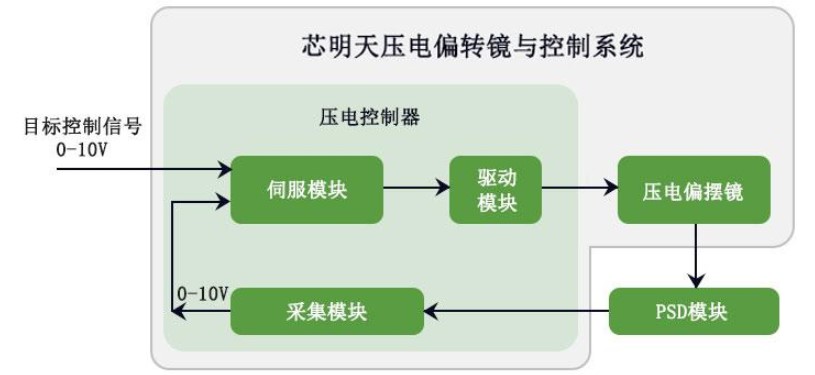
上图中展示的是激光稳定系统闭环控制的过程,除外部PSD位置探测器与 0~10V目标控制信号外,其余部分是芯明天压电偏转镜与压电控制器系统。
该系统中,压电偏转镜是执行部件,它控制反射镜片的偏转方向,即光路方向;而压电控制器是闭环回路控制和电压输出源,左侧浅绿色框内为压电控制器的功能。
该激光稳定系统中具有两个重要的信号,分别是控制信号和传感反馈信号,在伺服模块(包括比较和自适应调节)中进行处理,处理后的信号经过驱动模块进行功率放大(包含电压和电流放大)输出,施加至压电偏转镜,这样就能驱动PZT压电偏转镜进行偏转。同时,压电偏转镜的偏转引起光路变化,使得PSD传感反馈的信号也发生相应的变化,反馈信号被采集、处理,并进入伺服模块,与目标信号进行比较,根据比较后的差值,进行控制信号的调节。控制信号再对输出电压进行调节,使得施加至压电偏转镜的电压变化,从而改变压电偏转镜的转向,改变光路...进行下一个循环,如此反复,将激光的最终位置稳定在目标位置上。
压电控制器的功能
该激光稳定系统的闭环原理细节可通过压电控制器的功能来解释,如下概述:
1)功率放大
压电偏转镜的驱动电压一般需达到0~120V或150V左右,而控制输入电压通常较小,例如0~10V或0~5V等,因此,就需对控制输入电压进行放大,达到驱动压电偏转镜的要求,施加至压电偏转镜。
通过压电控制器的功率放大,将输入的目标控制模拟信号进行放大并输出。
注:目标控制信号一般为0~10V,也可设定为其他范围,可在采购时与区域销售经理进行确认。
2)传感信号的采集、处理、比较
随着压电偏转镜的转向调节,PSD探测器接收到的光功率信号会发生变化。压电控制器将对PSD位置探测器返回的电压信号进行采集、处理、比较,对相应的偏差信号进行伺服调节,并放大输出至压电偏转镜,从而改变压电偏转镜的偏转方向。
综上所述即为芯明天激光稳定系统的大致流程。PSD位置探测器可对光束的光斑进行实时位置检测,并反馈给补偿压电控制器,补偿压电控制器对PSD位置探测器反馈的传感器信号进行采集、处理、放大,同时向补偿压电偏转镜输出相应的补偿控制电压信号,补偿压电偏转镜根据补偿控制电压信号进行快速角度调整,使得光信号准确、完整的接收,从而达到成像或光通信等目的。
压电偏转镜内置传感器与外部PSD闭环的区别
与采用内置传感器的闭环版本压电偏转镜相比,开环压电偏转镜具有更快的响应速度及更高的分辨率,因此采用外部PSD位置探测器检测,可提高光束的调整速度。另外,PSD可直接对光斑位置进行测量,是光束偏转方向的直接反应。而内置传感器的闭环版本压电偏转镜的特点是使得控制电压与偏转角度间成线性关系,可保证压电偏转镜的实际偏转角度与预期控制调整的偏转角度相一致。通过计算机显示可观看光束跟踪及稳定情况。
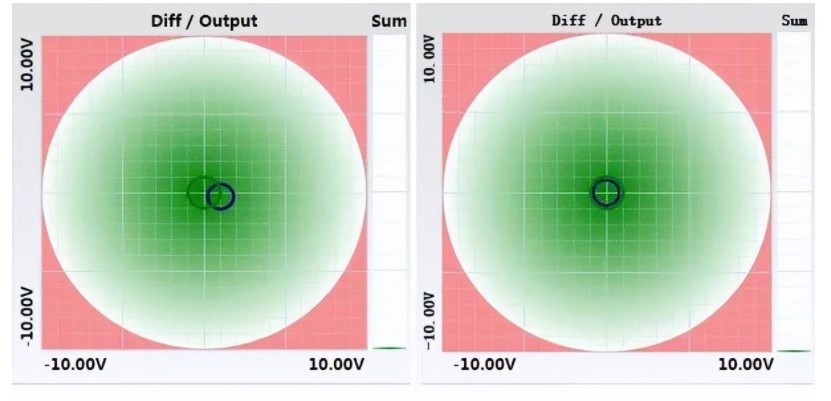
在该系统中,当开启补偿压电偏转镜之前,位置探测器显示的效果如下左图中所示,光斑与目标位置间有偏移;而在开启补偿压电偏转镜后,可从软件中直观的看到,光斑稳定在预先设定的目标位置,如下图所示。
结束语
经过压电偏转系统的补偿控制,使得光的传输更加精确稳定。其中重要的因素就是压电偏转镜有超高的偏转精度和超快的偏转速度。芯明天P33.T2K压电偏转镜与E70.D3S压电控制器为整个激光稳定过程提供了纳弧度级的偏转精度及毫秒甚至亚毫秒的偏转响应速度,这在该系统中起着决定性的作用。
-
激光
+关注
关注
21文章
3723浏览量
69881 -
闭环控制
+关注
关注
0文章
102浏览量
16158
发布评论请先 登录
会议云台马达驱动板:高精度速度 / 位置闭环控制技术
小型无刷散热风扇调速与闭环控制算法:原理、实现与优化
高速离心风机驱动板高精度转速闭环控制技术
基于MT6813的云台电机角度闭环控制系统设计与应用-艾毕胜电子
变频器+编码器如何做闭环控制?
云台伺服驱动板闭环控制参数解读与整定
高压功率放大器在超声电机性能测试与闭环实验中的应用

变频器无法实现闭环控制的原因及解决方案

闭环控制存在延时
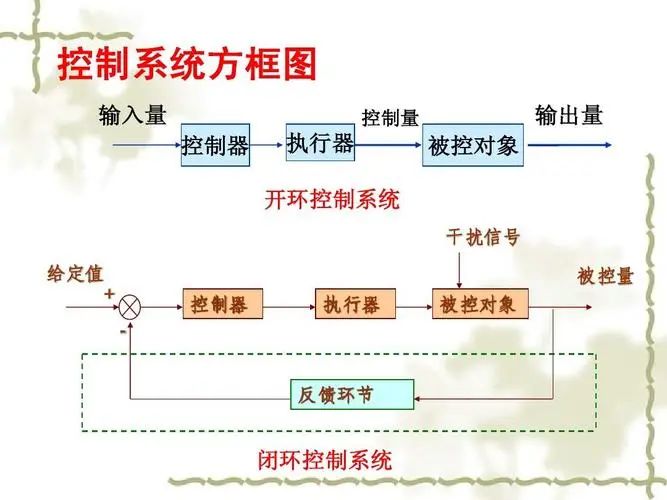
自动控制系统中什么叫开环控制,半闭环控制,闭环控制?三者有何区别?
光伏电站辅助决策系统的实现



评论