 一文解析锁相环基本原理
一文解析锁相环基本原理
锁相环作为通信系统中提供本振信号(LO),实现频率生成和相位管理单元,被广泛应用于通信设备,测量仪器,手持终端等各式产品中,市场应用极其广泛。本文主要解析锁相环基本原理,典型锁相环方案介绍。
基础理论
锁相环(Phase Locked Loop)是一个闭环的相位控制系统,它的输出信号的相位能自动跟踪输入信号相位。系统框图如下:
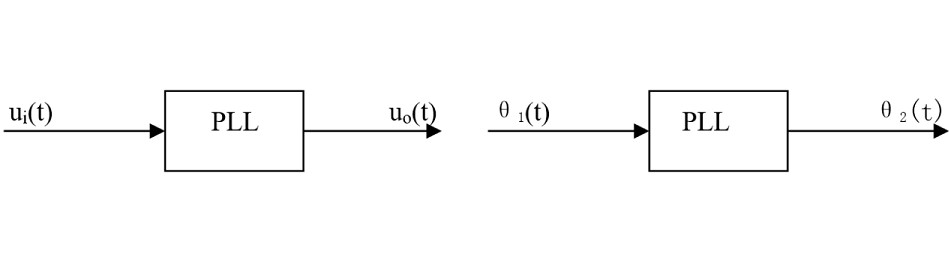
当θ1(t)与θ2(t)相等时,两矢量以相同的角速度旋转,相对位置,即夹角维持不变,通常数值又较小,这就是环路的锁定状态。
从输入信号加到锁相环路的输入端开始,一直到环路达到锁定的全过程,称为捕获过程。设系统最初进入同步状态
的时间为ta。那么从t = t0的起始状态到达进入同步状态的全部过程就称为锁相环路的捕获过程。捕获过程所需的时间TP = ta - t0称为捕获时间。显然,捕获时间TP的大小不但与环路的参数有关,而且与起始状态有关。
对一定的环路来说,是否能通过捕获而进入同步完全取决于起始频差。
若Δω0超过某一范围,环路就不能捕获了。这个范围的大小是锁相环路的一个重要性能指标,称为环路的捕获带Δωp。
捕获状态终了,环路的状态稳定在

这就是同步状态的定义。只要在整个变化过程中一直满足(1-1)式,那么仍称环路处于同步状态。由上可知,在输入固定频率信号的条件之下,环路进入同步状态后,输出信号与输入信号之间频差等于零,相差等于常数,即
这种状态就称为锁定状态。
锁相环路的组成
锁相环路为什么能够进入相位跟踪,实现输出与输入信号的同步呢?因为它是一个相位的负反馈控制系统。这个负反馈控制系统是由鉴相器(PD)、环路滤波器(LF)和电压控制振荡器(VCO)三个基本部件组成的,基本构成如图:
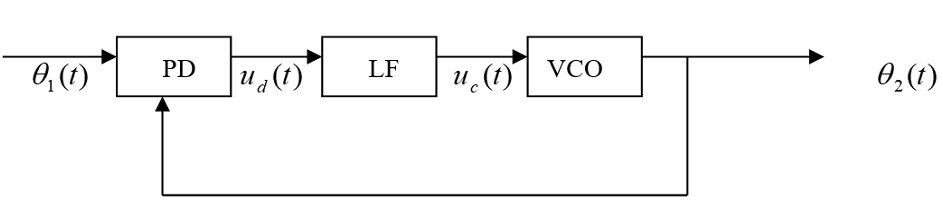
实际应用中有各种形式的环路,但它们都是由这个基本环路演变而来的。下面逐个介绍基本部件在环路中的作用。
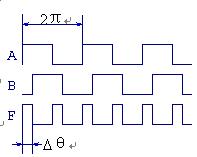
鉴相器(PD)是一个相位比较装置,用来检测输入信号相位与反馈信号相位之间的相位差。输出的误差信号是相差的函数,即鉴相特性可以是多种多样的,有正弦形特性、三角形特性、锯齿形特性等等。常用的正弦鉴相器可用模拟相乘器与低通滤波器的串接作为模型。
环路滤波器(LP)具有低通特性,它可以起到图中低通滤波器的作用,更重要的是它对环路参数调整起差决定性的作用。
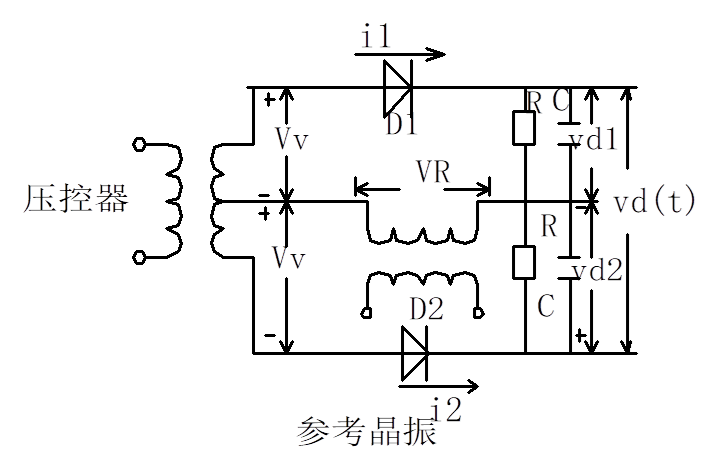
压控振荡器(VCO)是一个电压—―频率变换装置,在环中作为被控振荡器,它的振荡频率应随输入控制电压uc(t)线性地变化。实际应用中的压控振荡器的控制特性只有有限的线性控制范围,超出这个范围之后控制灵敏度将会下降。
压控振荡器应是一个具有线性控制特性的调频振荡器,对它的基本要求是:频率稳定度好(包括长期稳定度与短期稳定度);控制灵敏度K0要高;控制特性的线性度要好;线性区域要宽等等。这些要求之间往往是矛盾的,设计中要折衷考虑。
压控振荡器电路的形式很多,常用的有LC压控振荡器、晶体压控振荡器、负阻压控振荡器和RC压控振荡器等几种。前两种振荡器的频率控制都是用变容管来实现的。由于变容二极管结电容与控制电压之间具有非线性的关系,所以压控振荡器的控制特性肯定也是非线性的。为了改善压控特性的线性性能,在电路上采取一些措施,如与线性电容串接或并接,以背对背或面对面方式连接等等。在有的应用场合,如频率合成器等,要求压控振荡器的开环噪声尽可能低,在这种情况下,设计电路时应注意提高有载品质因素和适当增加振荡器激励功率,降低激励级的内阻和振荡管的噪声系数。
环路的性能
1. 环路的基本性能
如上所述,环路有两种基本状态。
其一是捕获过程。
评价捕获过程性能有两个主要指标。一个是环路的捕获带Δωp,即环路能通过捕获过程而进入同步状态所允许的最大固有频差 |Δω0|max。若Δω0 > Δωp,环路就不能通过捕获进入同步状态。故
另一个指标是捕获时间TP,它是环路由起始时刻到进入同步状态的时刻之间的时间间隔,捕获时间的大小除决定于环路参数之外,还与起始状态有关。一般情况下输入起始频差越大,TP就越大,通常以起始频差等于Δωp,来计算最大捕获时间,并把它作为环路的性能指标之一。
环路的另一个基本工作状态是同步。
环路锁定之后稳态频差等于零。稳态相差通常总是存在的。它是一个固定值,反映了环路跟踪的精度,是一重要的指标。此外,已经锁定的锁相环路,若再改变其固有频差Δω0,稳态相差会随之改变。当固有频差Δω0增大到某一值时,环路将不能维持锁定。这个锁相环路能够保持锁定状态所允许的最大固有频差称为环路的同步带,也是环路的一个重要参数。
上面提到的几项指标是对环路最基本的性能要求。锁相环路作为一个控制系统,要全面衡量它的性能尚有一系列的指标,诸如稳定性、响应速度、对干扰和噪声的过滤能力等等。
2. 环路的跟踪性能
实际的锁相环路在锁定状态之下的稳态相差通常是比较小的。锁定之后,若输入信号的相位θ1(t)发生变化,被控振荡器的输出相位θ2(t)将进行跟踪,在此过程中环路相差θe(t)是变化的。假如在整个跟踪过程中,环路相差θe(t)始终比较小。这种可以将环路近似为线性系统来进行分析的跟踪过程称为线性跟踪。应该注意,线性跟踪是在环路的同步状态下进行的,这是锁相环路正常工作时最常见的情况,工程上有实用价值,应引起我们的重视。
当环路处于锁定状态时,输出频率与输入频率相同,两者之间只有一稳态相差。在此条件下,若输入信号发性相位或频率的变化(干扰或调制所引起的),通过环路自身的控制作用,环路输出信号,也即压控振荡器的振荡频率和相位,会跟踪输入信号的变化。如果是理想的跟踪,输出信号的频率和相位应时时与输入信号相同。其实不然,环路需有一个跟踪过程。首先,出现过程,有暂态相位误差,其次在到达稳定状态后,据输入信号形式的不同,有不同的相位误差。上述由于输入信号变化而引起的暂态相位误差和稳态相位误差的大小,是衡量环路线性跟踪性能好坏的重要标志。它们不仅与环路本身的参数有关,还与输入信号的变化形式有关。
根据分析可知:
对于同一种环路来说,输入信号变化越快,跟踪性能就越差,频率越高越难。
同一信号加入不同的锁相环路,其稳态相差是不同的。
事实上,决定环路稳态跟踪相差的不是环路开环传递函数总极点的个数,而是在原点处的极点个数。
3. 环路噪声性能
锁相环路无论工作在哪种应用场合,都不可避免地受到噪声和干扰的作用。噪声和干扰的来源主要有两类:一类是与信号一起进入环路的输入噪声与谐波干扰。输入噪声包括信号源或信道产生的白高斯噪声、环路作载波提取用时信号调制形成的调制噪声,另一类是环路部件产生的内部噪声与谐波干扰,以及压控振荡器控制端感应的寄生干扰等,其中压控振荡器内部的噪声是主要的噪声源。
噪声与干扰的作用必然会增加环路捕获的困难,降低跟踪性能,是环路输出相位产生随机的抖动。若环路用作频率合成信号源与微波固态信号源,则输出频谱不纯,短期频率稳定度变差;若环路用作调制解调器,则输出信噪比下降,较强的干扰与噪声还会使环路发生跳周和失锁的概率加大,以致出现门限效应。
4. 环路捕获性能
捕获概念在开机、换频、和由开环到闭环,一开始环路总是失锁的,因此环路需经由失锁进入锁定的过程。通常把使环路进入锁定的过程称为捕获。
在我们应用的锁相环中,存在相位捕获和频率捕获两个捕获过程。
自捕获和辅助捕获:如果环路依靠自己的控制能力达到捕获锁定,称这种捕获过程为自捕获。若环路借助于辅助电路才能实现捕获锁定,则称这种捕获过程为辅助捕获。
在固定频率输入下,视固有频差Δω0的大小,二阶环路有产生稳定的差拍状态和进入锁定两种可能性。保证环路必然进入锁定的最大固有频差值,称为捕获带。由于二阶环的捕获过程包含频率捕获和相位捕获两个过程,通常又把保证环路只有相位捕获一个过程的最大固有频差值,称为快捕带。频率捕获所需的时间,称为频率捕获时间(或频率牵引时间)。相位捕获所需要的时间称为快捕时间(或相位捕获时间)。通常频率捕获时间总是远大于相位捕获时间的,所以一般所说的捕获时间,就是指频率捕获时间,而不考虑相位捕获时间的影响。
依靠环路的自身捕获,捕获时间长,捕获带窄,另外还可能出现延滞、假锁等不能可靠捕获的现象。因此研究各种有效的辅助捕获方法,是十分必要的。
为改善环路捕获性能,总希望捕获带越宽越好,捕获时间越短越好。为了加大环路的捕获带,应提高环路的增益K或者增加滤波器的带宽。为缩短环路的捕获时间,除用与前者相同的措施以外,还可设法减小作用到环路上的起始频差。但是加大环路增益或滤波器带宽往往是与提高环路的跟踪性能和滤波性能的要求相矛盾的。一般在设计还路时,总是优先考虑环路的跟踪性能和滤波性能,而对捕获性能的要求,则采用一些辅助捕获的方法来得到满足。此外,为了有效地克服延滞与假锁,在环路中也往往要求加入辅助捕获装置。
主要介绍辅助频率捕获方法,它的基本出发点是:
(1)减小作用到环路上的起始频差使之快速落入快捕带内,达到快速锁定。属于这方面的有人工电调、辅助扫描、辅助鉴频和鉴频鉴相等几种方法;
(2)使用两种不同的环路带宽和增益,捕获时使环路具有较大的带宽和增益,锁定以后是环路带宽或增益减小。这就是所谓的变带宽和变增益法。
在下一篇里,将进行电路实解和经典方案介绍,敬请关注期待。
-
锁相环
+关注
关注
35文章
585浏览量
87776 -
控制系統
+关注
关注
0文章
30浏览量
2655
发布评论请先 登录
相关推荐







 工商网监
工商网监
评论