 什么是关联速度问题
什么是关联速度问题

一、什么是“关联速度”问题
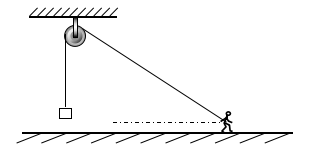
所谓“关联速度”就是两个通过某种方式联系起来的速度。比如一根绳两端的速度通过绳发生联系。 如下图所示,人通过跨过光滑定滑轮的轻绳拖动重物,人向右匀速运动,当绳与水平方向的夹角为θ角时,物块上升的速度是多少。
二、已经掌握的知识
1、两个物体用不可伸长轻绳连接在一起,在水平面上运动,这两个物体任何时刻速度相等。因为轻绳是理想化模型,不可发生明显形变,所有任何一段时间两物体的位移必相同,由此判定速度必相同,并且两个物体的速度与绳上任意一点的速度都相同。

2、不可伸长的轻绳一端固定在天花板上,另一端连接小球,让小球在竖直平面内摆动,绳上各点的运动情况(线速度)就不同了,离悬点越远的点线速度越大。
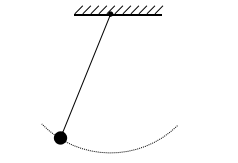
以上两个实例告诉我们,同一绳子上各点的速度不一定相同。只有当绳子上各点都沿绳的方向运动时,各点的速度大小才相同,而当绳子绕点转动时绳上各点的线速度大小不同。
三、可以这样分解合速度
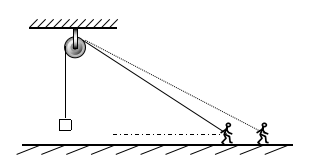
基于以上的前提知识,我们假设人站在原地不动,双手收绳子而使物体上升,则物块上升的速度与人收绳子的速度相等;假如人以滑轮为悬点,保持悬点到人手之间的绳长不变,在竖直平面内转动绳子,则物块不会上升。也就是说,绳子的转动不会改变物块的速度,只有沿绳方向收绳子时物块才会上升。
所以,当人运动拉绳时,绳子沿绳的方向运动,同时绕悬点旋转。此时可以把人看做绳上的一个点,人的运动可以看作合运动,能分解为沿绳的方向的运动和绕悬点的转动。物块上升的速度与人的速度沿绳方向的分量大小相等,从而得出物块的速度v 物 =v人cosθ。
四、也可以用“微元法”求解
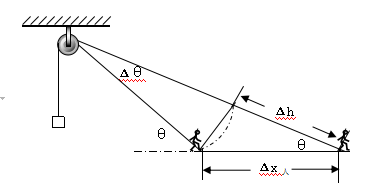
用数学方法更容易表述物理思想。取很短的时间Δt研究,在该时间内人运动的位移
Δx 人 =V人Δt
由于Δt趋近于零,故绳子转过的角度Δθ也趋近于零,物体上升的高度Δh
Δh=Δx人cosθ
而物体的速度可以这样表示
v 物 =Δh /Δt
综合以上关系式得到 v 物 =v人cosθ
这样理解关联速度是不是很容易?
审核编辑:刘清
-
自由曲线速度场
+关注
关注
0文章
2浏览量
1407
发布评论请先 登录
CAD标注关联的作用解析
基于回收技术的关联规则研究
基于“新颖度”的关联挖掘算法An Association R
基于用户兴趣导向的关联规则数据挖掘
关联规则Apriori算法的改进
关联规则推荐算法分析及评估

基于MapReduce的并行关联规则挖掘算法
伺服控制、步进控制、变频控制三大部分解答
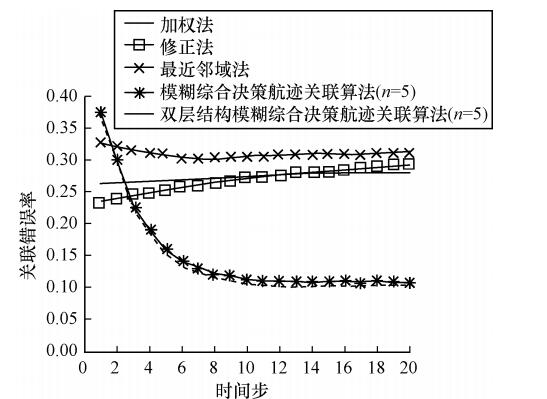
模糊航迹关联算法的分析及改进
详解伺服、步进、变频三大控制要点
伺服控制与步进控制的性能对比




评论