 卡尔曼滤波器的递归算法
卡尔曼滤波器的递归算法
后面准备抽时间把DR_CAN老师的卡尔曼滤波的视频的笔记也会做一下整理。
主要还是心里有个执念,以前在做智能车比赛的时候,需要对六轴传感器做滤波角度计算的。这部分代码则只是将学长的代码copy之后,并不懂其中的原理。
所以其中的一个目的:就是把笔记做完,再看看原来的代码,那是曾经的熟悉且鞭辟近里。
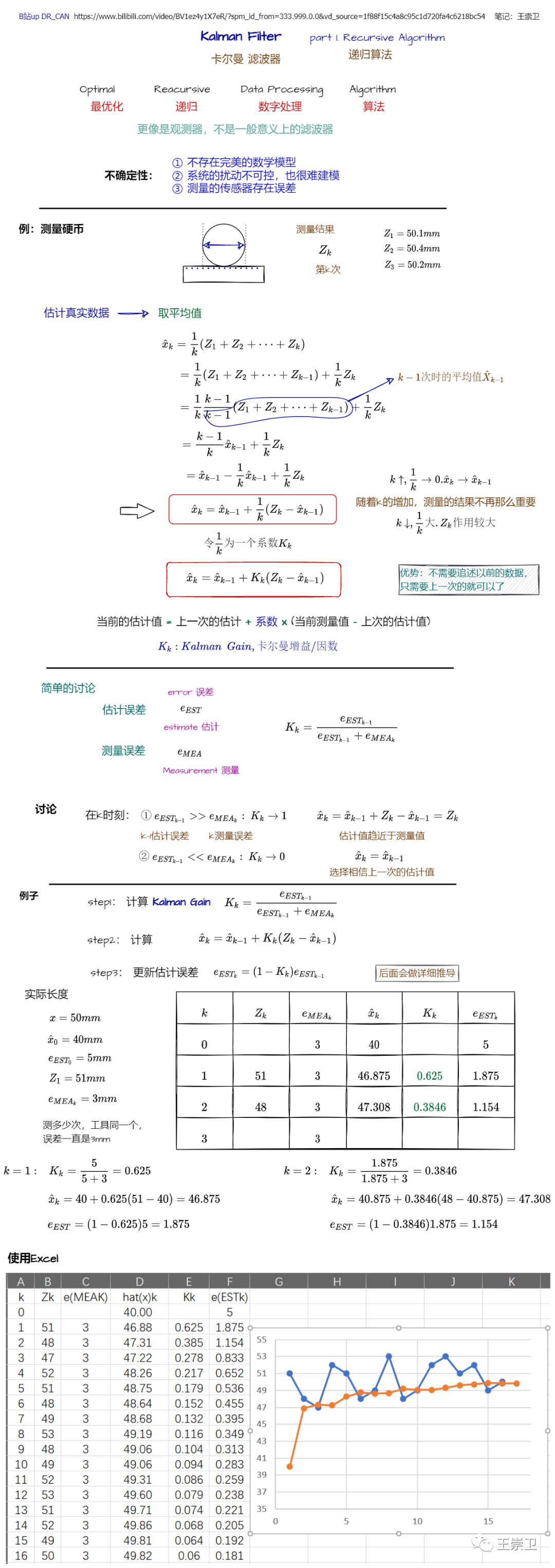
卡尔曼滤波器
更像是观测器,不是一般意义上的滤波器。
现实中的大量不确定性
不存在完美的数学模型
系统的扰动不可控,很难建模
测量的传感器存在误差
卡尔曼增益
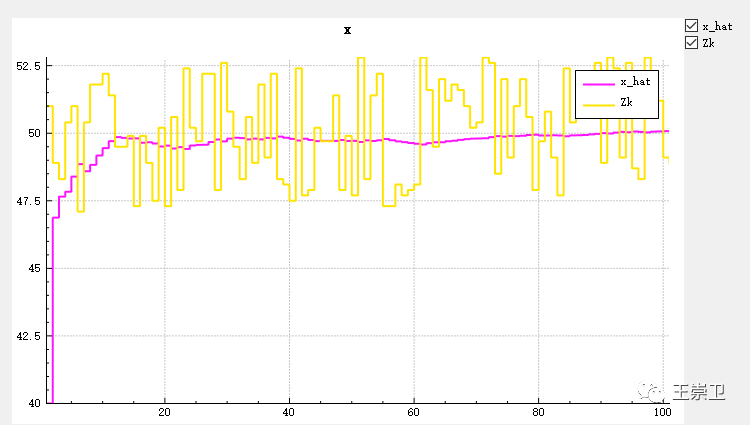
qt的仿真:
老师用Excel做的图,我用ctrlsim也做了一个简单的仿真。
https://gitee.com/wang_chong_wei/CtrlSim
https://github.com/chongweiwang/CtrlSim
CtrlSim_TI_SMO观测器
[现代控制理论]3-5_连续系统离散化
CtrlSim_电机控制
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
滤波器
+关注
关注
161文章
7884浏览量
179156 -
卡尔曼滤波器
+关注
关注
0文章
54浏览量
12212
原文标题:[卡尔曼滤波器]1_递归算法_Recursive Processing
文章出处:【微信号:王崇卫,微信公众号:王崇卫】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
卡尔曼滤波器算法(C语言)
及噪声协方差;估计阶段由回归模型代替状态方程和观测方程,相应的噪声协方差实时自适应调整.该方法克服了传统方法容易受系统动态模型不确定性和噪声协方差不准确限制的问题,仿真结果验证了算法的有效性卡尔曼
发表于 10-24 09:59

使用FPGA实现自适应卡尔曼滤波器的设计论文说明
在视频图像获取过程中“由于噪声对图像序列的降质”需要设计实时噪声滤波器。讨论了视频图像的卡尔曼滤波问题及自适应卡尔
发表于 01-22 14:29
•22次下载
使用FPGA实现自适应卡尔曼滤波器的设计论文说明
在视频图像获取过程中“由于噪声对图像序列的降质”需要设计实时噪声滤波器。讨论了视频图像的卡尔曼滤波问题及自适应卡尔
发表于 01-22 14:29
•13次下载
卡尔曼滤波器递归算法笔记整理
主要还是心里有个执念,以前在做智能车比赛的时候,需要对六轴传感器做滤波角度计算的。这部分代码则只是将学长的代码copy之后,并不懂其中的原理。





 工商网监
工商网监
评论