 分享一下运动控制器位置锁存功能的应用
分享一下运动控制器位置锁存功能的应用
今天,正运动小助手给大家分享一下运动控制器位置锁存功能的应用,以ZMC408CE运动控制器为例,介绍多种锁存模式的用法,用户可根据自身需求灵活选择。
01 锁存功能
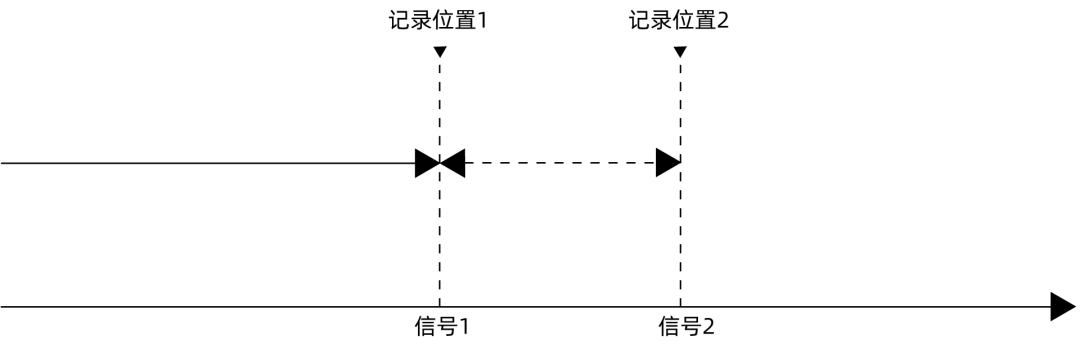
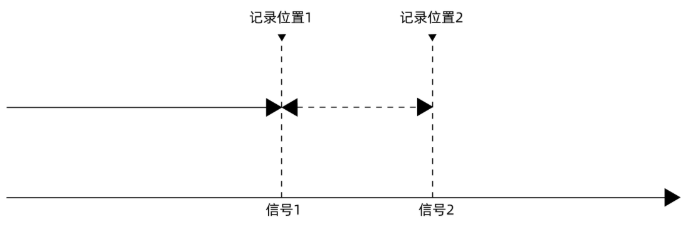
锁存功能的作用就是当外部io信号触发时,立即响应,锁定当前的电机/编码器的位置,通常用来锁定流水线上碰到光纤传感器时的产品位置、锁定包装材料上色标的位置等。
一、锁存功能的特点:
1.支持编码器轴、总线轴、脉冲轴和虚拟轴锁存(不同型号的控制器支持锁存的轴类型不同);
2.支持单次锁存和高速连续锁存模式;
3.支持4通道同时锁存,分别为R0、R1、R2、R3四个锁存通道,最多支持8个锁存口同时锁存,锁存响应速度快;
4.带编码器反馈时锁存MPOS的值,没有带编码器反馈时锁存DPOS的值。
不同型号的控制器支持的锁存通道数不同,是否支持锁存功能与锁存对应的输入口参见硬件手册。
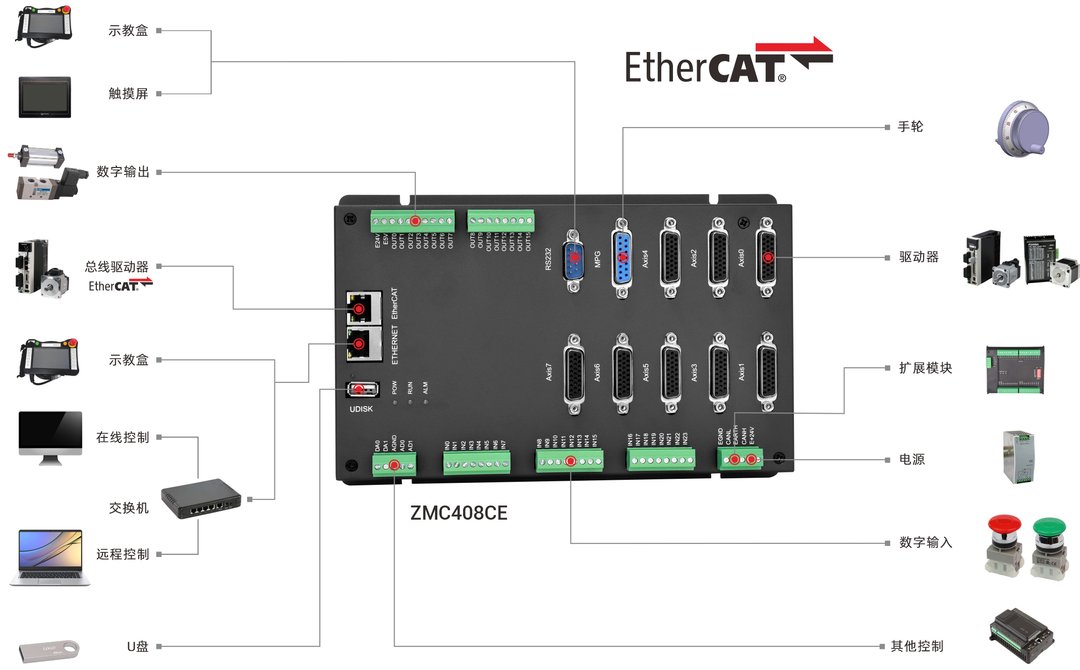
本文例子基于ZMC408CE控制器测试,此型号支持4个锁存通道,硬件接口为IN0-IN3。
通讯接口包含RS232、RS485、EtherNET以太网、CAN总线、EtherCAT总线和U盘接口,板载8路差分脉冲输出接口(包含编码器输入),1个专用手轮接口,还提供了AD/DA模拟量接口。
ZMC408CE支持EtherCAT总线连接,支持最快500μs的刷新周期,支持最多达32轴运动控制(8脉冲轴+EtherCAT轴/编码器轴/虚拟轴),支持直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随、虚拟轴设置等;采用优化的网络通讯协议可以实现实时的运动控制。
ZMC408CE还支持8通道PWM输出,支持硬件比较输出、硬件定时器、运动中精准输出等。
二、实现锁存的步骤
1.锁存功能使用方法
(1)确定当前硬件条件是否满足锁存需求,需要确定锁存位置的轴,IO信号接入支持锁存的输入口IN;
(2)设置锁存输入映射口REG_INPUT,作用是将锁存的通道R0/R1/R2/R3对应到物理输入口IN,需要输入口支持锁存功能;
(3)设置锁存模式REGIST,需根据锁存的轴类型选择;
(4)等待锁存触发MARK / MARKB / MARKC / MARKD,锁存触发了变为真;
(5)锁存完成打印锁存位置信息REG_POS / REG_POSB / REG_POSC / REG_POSD;
(6)可读取锁存位置起始坐标和结束坐标,锁存位置可被其他指令调用。
2.锁存相关指令
锁存相关指令一览表:
| 指 令 | 说 明 | 用 法 |
| REGIST | 设置锁存模式 | REGIST(模式值) |
| REG_INPUTS | 锁存通道映射到输入口 | REG_INPUTS=$输入口编号 |
| MARK | 判断锁存是否触发 | WAIT UNTIL MARK |
| MARKB | 判断第二个锁存是否触发 | WAIT UNTIL MARKB |
| MARKC | 判断第三个锁存是否触发 | WAIT UNTIL MARKC |
| MARKD | 判断第四个锁存是否触发 | WAIT UNTIL MARKD |
| REG_POS | 保存锁存的测量反馈位置 | 读取/打印REG_POS |
| REG_POSB | 返回锁存2的测量反馈位置 | 读取/打印REG_POSB |
| REG_POSC | 返回锁存3的测量反馈位置 | 读取/打印REG_POSC |
| REG_POSD | 返回锁存4的测量反馈位置 | 读取/打印REG_POSD |
| OPEN_WIN | 锁存触发的开始坐标范围点 | OPEN_WIN=POS |
| CLOSE_WIN | 锁存触发的结束坐标范围点 | CLOSE_WIN=POS |
REG_INPUTS映射锁存输入、REGIST设置锁存的模式、MARK / MARKB / MARKC / MARKD判读锁存是否触发、REG_POS / REG_POSB / REG_POSC / REG_POSD成功锁存之后位置存储。
当锁存产生时,对应锁存通道的MARK / MARKB / MARKC / MARKD会被设置为ON,同时锁存到的位置会被存储在参数REG_POS / REG_POSB / REG_POSC / REG_POSD内。
三、REG_INPUTS映射说明
REG_INPUTS映射规则如下,REGIST锁存模式的设置需配合REG_INPUTS而设置。
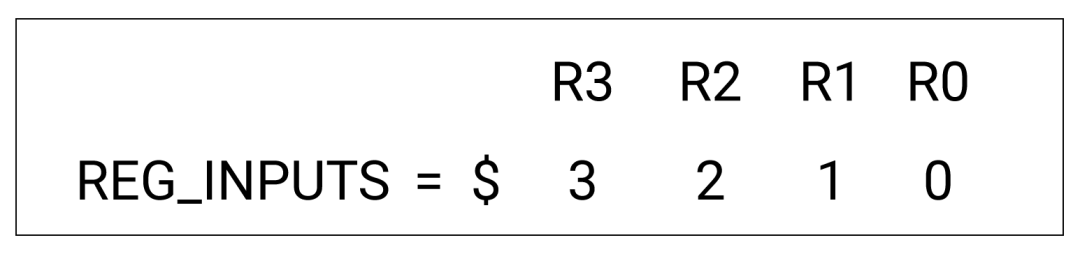
例如:
REG_INPUTS = $3210,则表示R3,R2,R1,R0分别对应输入口3,2,1,0
REG_INPUTS = $1023,则表示R3,R2,R1,R0分别对应输入口1,0,2,3
REG_INPUTS = $1000,则表示R3,R2,R1,R0分别对应输入口1,0,0,0 之所以这样设置是因为REGIST模式匹配R0、R1、R2、R3信号虽然不是物理的IO通道,却能带来最大的灵活性。 输出信号R0实际可以对应设备上的IN(0)...IN(7)中的任意一个(可选的输入通道必须是硬件手册指定的锁存通道),或者R0和R3都对应同一个输入口。
四、REG_POS锁存位置说明
使用的本地IO,可以通过REG_INPUTS来锁存通道的映射,不同的锁存信号通道锁存的数据存储的位置不同,如下表,详情参见REGIST指令说明。
| R信号 | 锁存状态 | 锁存数值 |
| R0 | Mark | Reg_Pos |
| R1 | MarkB | Reg_PosB |
| R2 | MarkC | Reg_PosC |
| R3 | MarkD | Reg_PosD |
| Z | 不定 | 不定 |
02 REGIST锁存模式
REGIST设置锁存模式,根据要锁存的轴类型选择合适的锁存模式,锁存模式参见下文,有单次锁存和连续锁存两种。
不同的锁存方式,锁存信号的触发标志不同,锁存位置数据存储的位置也不同。
不同轴类型支持的锁存通道:
(1)编码器轴、带反馈的脉冲轴类型一般采用R0,R1,Z脉冲这三种锁存;
(2)无反馈的脉冲轴和虚拟轴采用R0,R1锁存;
(3)EtherCAT或RTEX总线轴类型采用R2,R3锁存;
(4)另外EtherCAT总线可以使用驱动器自身的锁存模式,详情参见驱动器手册说明。
语法一:单次锁存
REGIST(mode)
mode:锁存方式如下表。
| 值 | 描 述 |
| 1 | 当Z脉冲上升沿时的绝对位置送到REG_POS |
| 2 | 当Z脉冲下降沿时的绝对位置送到REG_POS |
| 3 | 当输入信号R0上升沿的绝对位置送到REG_POS |
| 4 | 当输入信号R0下降沿的绝对位置送到REG_POS |
| 6 | 输入信号R0上升沿时的绝对位置送到REG_POS,Z信号上升沿时的绝对位置送到REG_POSB |
| 7 | 输入信号R0上升沿时的绝对位置送到REG_POS,Z信号下降沿时的绝对位置送到REG_POSB |
| 8 | 输入信号R0下降沿时的绝对位置送到REG_POS,Z信号上升沿时的绝对位置送到REG_POSB |
| 9 | 输入信号R0下降沿时的绝对位置送到REG_POS,Z信号下降沿时的绝对位置送到REG_POSB |
| 10 | 输入信号R0上升沿时的绝对位置送到REG_POS,输入信号R1上升沿时的绝对位置送到REG_POSB |
| 11 | 输入信号R0上升沿时的绝对位置送到REG_POS,输入信号R1下降沿时的绝对位置送到REG_POSB |
| 12 | 输入信号R0下降沿时的绝对位置送到REG_POS,输入信号R1上升沿时的绝对位置送到REG_POSB |
| 13 | 输入信号R0下降沿时的绝对位置送到REG_POS,输入信号R1下降沿时的绝对位置送到REG_POSB |
| 14 | 输入信号R1上升沿时的绝对位置送到REG_POSB(14以后150804以后版本支持,每个锁存通道独立,支持4通道锁存) |
| 15 | 输入信号R1下降沿时的绝对位置送到REG_POSB |
| 16 | Z信号上升沿时的绝对位置送到REG_POSB |
| 17 | Z信号下降沿时的绝对位置送到REG_POSB |
| 18 | 输入信号R2上升沿时的绝对位置送到REG_POSC |
| 19 | 输入信号R2下降沿时的绝对位置送到REG_POSC |
| 20 | 输入信号R3上升沿时的绝对位置送到REG_POSD |
| 21 | 输入信号R3下降沿时的绝对位置送到REG_POSD |
注意:上升沿和下降沿对应的是控制器内部的硬件状态。对于ZMC系列控制器而言,由于OFF状态有效,故从无信号到有信号是下降沿;对于ECI系列控制器而言,由于ON状态有效,从无信号到有信号是上升沿。
若仍然容易混淆,建议使用前先使用下文例程简单测试一下锁存边沿,再应用于项目中。
语法二:连续锁存
通过把模式加100来支持连续锁存,锁存结果存储到TABLE里面。
REGIST(100+mode, tableindex, numes)
mode:锁存方式。
tableindex:连续锁存的内容存储的table位置,第一个table元素存储锁存的个数,后面存储锁存的坐标,最多保存个数= numes-1,溢出时循环写入。
numes:占用的table个数。
连续锁存模式分别对两个通道进行连续锁存,可以实现上下边沿的连续锁存。
(ECI20150829以上固件支持,4系列控制器20170523以上固件支持)
100+mode:只能使用单一通道的mode,加100表示使用连续锁存。
| 值 | 描述 |
| 101 | 当Z脉冲上升沿时的绝对位置送到REG_POS |
| 102 | 当Z脉冲下降沿时的绝对位置送到REG_POS |
| 103 | 当输入信号R0上升沿的绝对位置送到REG_POS |
| 104 | 当输入信号R0下降沿的绝对位置送到REG_POS |
| 114 | 输入信号R1上升沿时的绝对位置送到REG_POSB |
| 115 | 输入信号R1下降沿时的绝对位置送到REG_POSB |
| 116 | Z信号上升沿时的绝对位置送到REG_POSB |
| 117 | Z信号下降沿时的绝对位置送到REG_POSB |
| 118 | 输入信号R2上升沿时的绝对位置送到REG_POSC |
| 119 | 输入信号R2下降沿时的绝对位置送到REG_POSC |
| 120 | 输入信号R3上升沿时的绝对位置送到REG_POSD |
| 121 | 输入信号R3下降沿时的绝对位置送到REG_POSD |
| 123 | 当输入信号R0上升沿的绝对位置送到REG_POSB |
| 124 | 当输入信号R0下降沿的绝对位置送到REG_POSB |
| 133 | 当输入信号R0上升沿的绝对位置送到REG_POS,下一次切换下降沿,轮流切换。 |
| 134 | 当输入信号R0下降沿的绝对位置送到REG_POS,下一次切换上升沿,轮流切换。 |
| 135 | 当输入信号R1上升沿的绝对位置送到REG_POSB,下一次切换下降沿,轮流切换。下一次切换下降沿,轮流切换。 |
| 136 | 当输入信号R1下降沿的绝对位置送到REG_POSB,下一次切换上升沿,轮流切换。 |
03 锁存例程
1.脉冲轴(不带反馈)/虚拟轴锁存
可使用R0或R1通道,脉冲轴ATYPE=1/7,虚拟轴ATYPE=0,锁存MPOS的值(没有反馈时MPOS为假,复制DPOS)。
带反馈的情况锁存真实的编码器反馈的MPOS值,若支持Z信号,则可使用Z信号的模式。
配置参考如下图:
例程如下:
BASE(0) ATYPE=1 '脉冲轴 UNITS=100 DPOS=0 SPEED=10 ACCEL=100 DECEL=100 REG_INPUTS=0 '将R0-R3都对应输入口0,信号接入IN(0) REGIST(4) '选择R0锁存模式 TRIGGER '触发示波器 VMOVE(1) '轴运动 WAIT UNTIL MARK '等待锁存触发 PRINT REG_POS '打印锁存位置 END
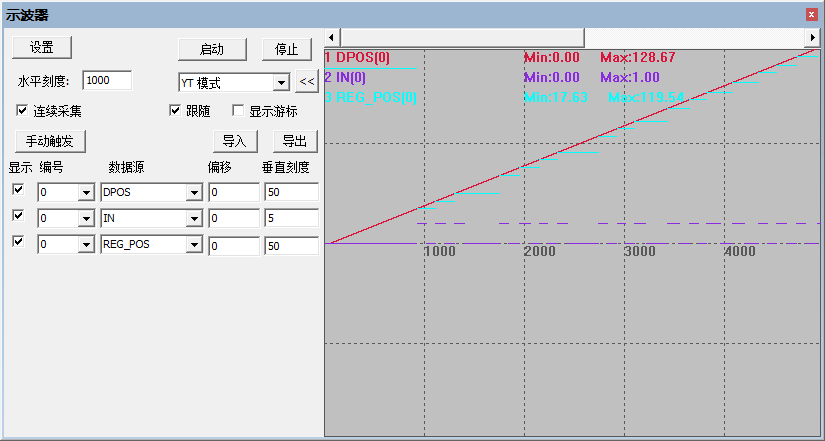
从示波器采样的波形可以看出,IN(0)有信号触发锁存,REGIST(4)生效锁存此刻的DPOS位置,并存储到REG_POS。
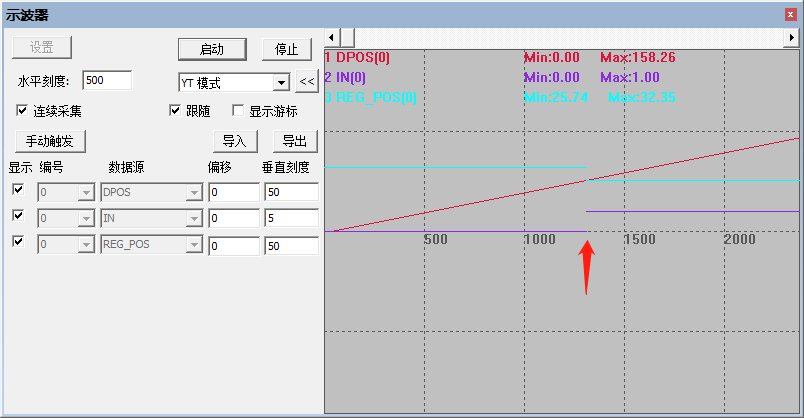
上例其他条件不变,锁存模式改为REGIST(3),锁存触发的边沿发生变化。
2.脉冲轴(带反馈)/编码器轴锁存
可使用R0、R1或Z通道(必须带Z信号的设备才支持),脉冲轴ATYPE=4/5,编码器轴ATYPE=3/6,锁存MPOS的值。
例程如下:
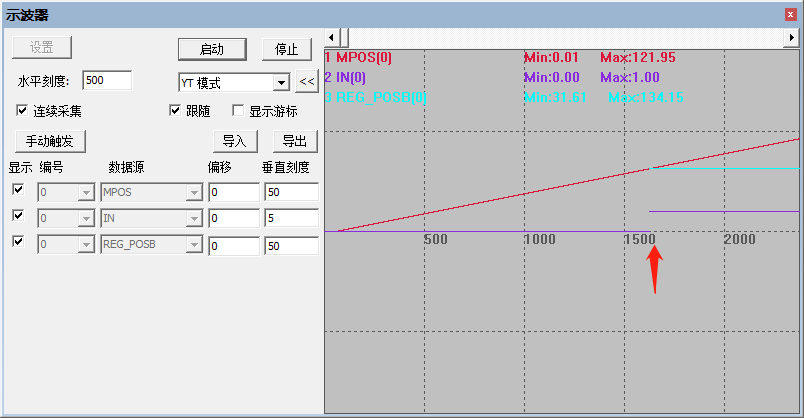
BASE(0) ATYPE=4 '脉冲带编码器反馈 UNITS=100 SPEED=10 ACCEL=100 DECEL=100 DPOS=0 MPOS=0 REG_INPUTS=$0 '将R0-R3都对应输入口0 ,信号接入IN(0) REGIST(15) '选择R1锁存模式 TRIGGER VMOVE(1) '轴运动 WAIT UNTIL MARKB '等待锁存触发 PRINT REG_POSB '打印锁存位置 END
从示波器采样的波形可以看出,IN(0)有信号触发锁存,锁存此刻的MPOS位置,并存储到REG_POSB。
3.多轴位置锁存
锁存多轴的位置时,需要分别对每个轴设置锁存,下例插补运动中锁存两个轴的位置。
例程如下:
BASE(0,1) ATYPE=1,1 '脉冲轴 UNITS=100,100 DPOS=0,0 SPEED=10,10 ACCEL=100,100 DECEL=100,100 REG_INPUTS=$0 '将R0-R3都对应输入口0,信号接入IN(0) REGIST(4) AXIS(0) '轴0选择R0锁存模式 REGIST(4) AXIS(1) '轴1选择R0锁存模式 TRIGGER '触发示波器 MOVE(1000,800) '轴运动 WAIT UNTIL MARK(0) AND MARK(1) '等待锁存触发 PRINT REG_POS(0), REG_POS(1) '打印轴0,轴1的锁存位置 END
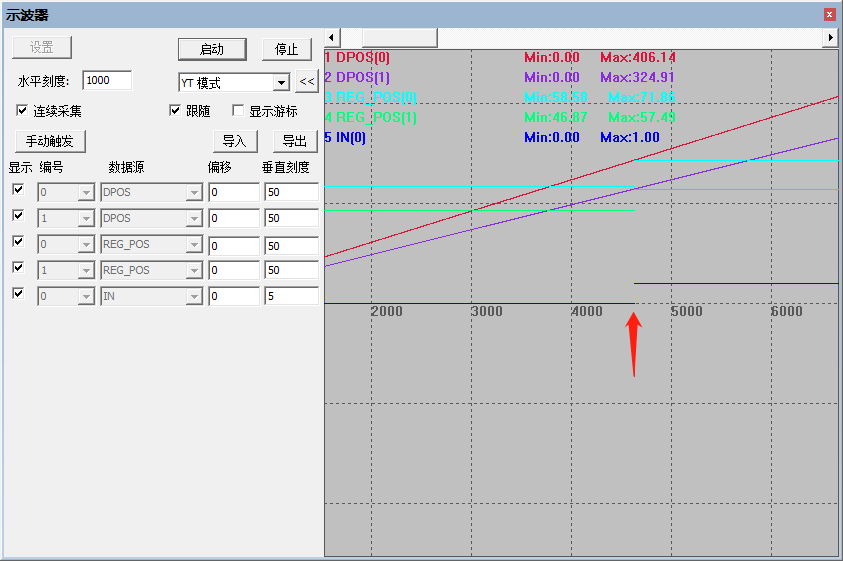
注意:多轴使用同一个锁存硬件输入口时,需采用相同的锁存R通道(如上例,模式3/4均可),需要使用不同R通道时,则需要映射到不同的硬件输入口上。
4.连续锁存模式
持续锁存信号触发后的位置,以上的轴类型均支持连续锁存模式,建议开单独任务执行连续锁存程序,不干扰其他程序的运行,可通过TABLE寄存器随时读取到锁存的次数和位置数据。
例程如下:
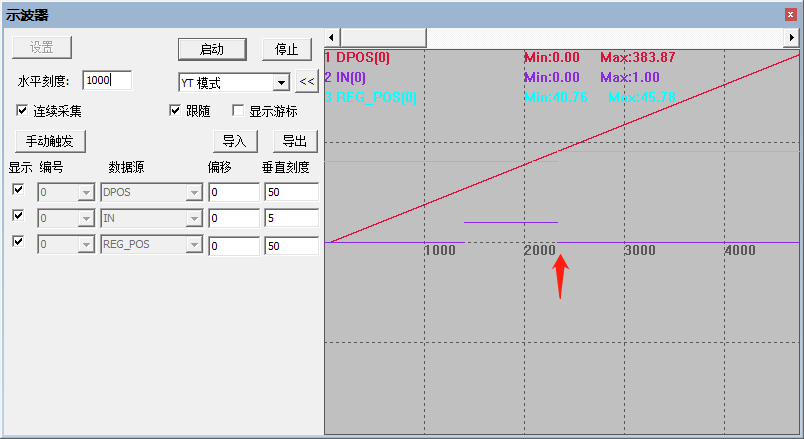
BASE(0) ATYPE=1 '脉冲轴 UNITS=100 DPOS=0 SPEED=10 ACCEL=100 DECEL=100 REG_INPUTS=$0 '将R0-R3都对应输入口0,信号接入IN(0) TRIGGER '触发示波器 VMOVE(1) '轴运动 REGIST(100+4,0,100) '连续锁存,R0通道,table(0)保存锁存次数,table(1-100)存储每次锁存的数据,超过99次后,table(0)清0,重新从table(1)记录数据WAIT UNTIL MARK
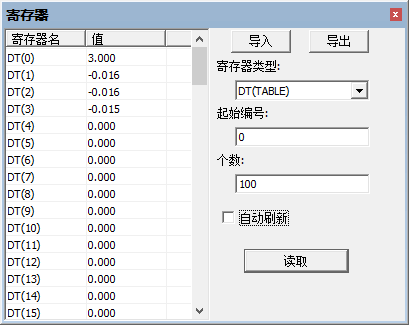
示波器捕捉连续锁存的位置数据:不需要WHILE循环就能实现连续锁存。
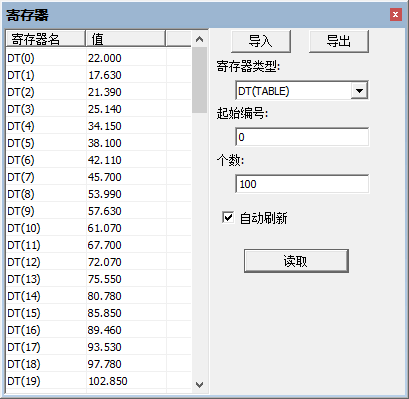
寄存器窗口读取锁存的次数和位置数据。
5.总线驱动器锁存
可使用R2、R3通道,脉冲轴ATYPE=4/5,EtherCAT和RTEX总线均支持,轴类型ATYPE=65/50,锁存MPOS的值。
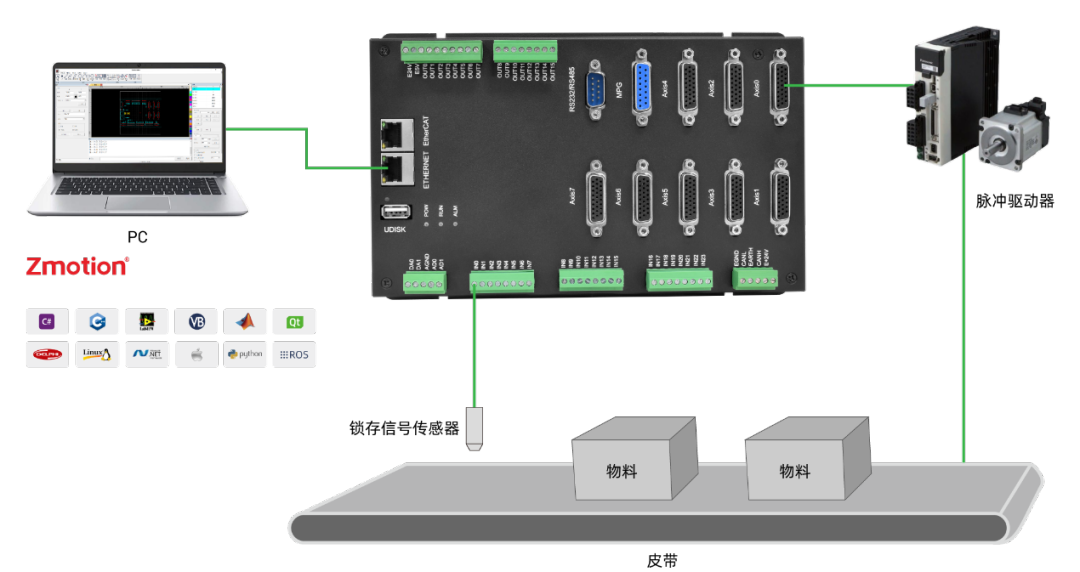
采用EtherCAT总线驱动器,可使用控制器提供的锁存模式,配置方法与前文类似;也可以使用EtherCAT总线驱动器自带的锁存模式(需参考驱动器手册完成配置)。
采用EtherCAT总线驱动器自带的锁存模式,选择驱动器支持锁存的探针,接入锁存信号;例如下方驱动器,有两个探针信号输入。

注意:驱动器PDO需包含60b8h锁存的数据字典,DRIVE_PROFILE直接选择带锁存的模式测试。
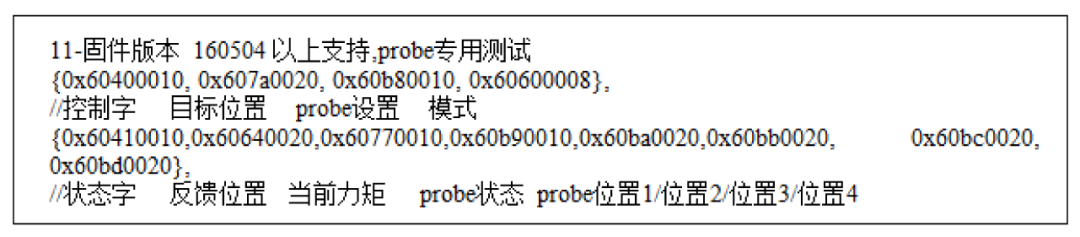
例如:DRIVE_PROFILE=11,PDO配置情况如下,更多模式参见DRIVE_PROFILE指令说明。
锁存模式采用REGIST提供的模式(需测试哪些模式支持),触发驱动器锁存之后,驱动器自行将锁存位置传到对应的REG_POS / REG_POSB / REG_POSC / REG_POSD,对应MARK变为真,用户无需通过驱动器数据字典获知。
例程如下:
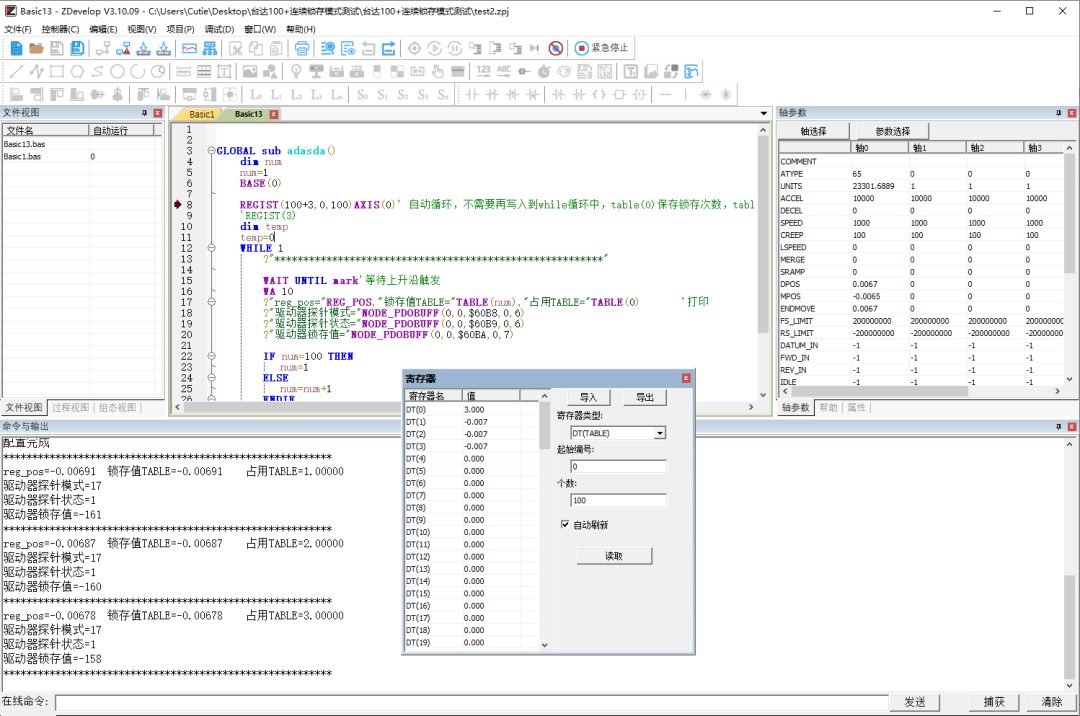
'******************************************************************************************** '总线初始化使能程序,初始化成功方可运行下方锁存程序 '初始化配置驱动器PDO需包含锁存的数据字典,DRIVE_PROFILE选择带锁存的模式测试 '******************************************************************************************** RAPIDSTOP WAITIDLE DIM num,AXIS_Max,TEMP FOR num=0 TO 7 STEP 1 BASE(num) ATYPE(num)=0 AXIS_ADDRESS(num)=(-1<<16)+num ATYPE(num)=0 NEXT num=0 SLOT_SCAN(0) IF RETURN THEN ?"总线扫描成功","设备连接数:"NODE_COUNT(0) 'i为槽位号,位轴数 FOR i=0 to NODE_COUNT(0)-1 AXIS_Max=NODE_AXIS_COUNT(0,i)'单个设备连接总数 ?"AXIS_Max="AXIS_Max IF AXIS_Max<>0THEN FOR j=0 TO AXIS_Max-1 AXIS_ADDRESS(num)=(i<<16)+num+1 ATYPE(num)=65 '轴映射最后一步 'units(num)=2^23/360 '单轴脉冲当量设置 DRIVE_PROFILE(num)=11 '设置PDO功能 disable_group(num) '每轴单独分组 num=num+1 '当前设备总轴数 NEXT ELSE ?"当前设备无轴" END ENDIF NEXT ?"轴映射完成!总轴数:"num ELSE ?"总线扫描失败" END ENDIF DELAY(100) SLOT_START(0) IF RETURN THEN ?"总线开启成功" DELAY(100) DATUM(0)'清除所有轴错误状态 DELAY(100) ?"开始进行轴使能" FOR i=0 to num-1 base(i) AXIS_ENABLE=1'单轴使能 NEXT WDOG=1'轴使能总开关开启 ?"轴使能完成" ELSE ?"总线开启失败" ENDIF ?"配置完成" adasda() '调用锁存函数 END '******************************************************************************************** '锁存函数 '选择驱动器支持锁存的探针,接入锁存信号 锁存模式采用REGIST提供的模式,触发锁存之后,驱动器将锁存位置传到REG_POS '******************************************************************************************** WHILE 1 IF OP(0) = ON THEN OP(0, OFF) temp=-1 ENDIF temp=0 WEND GLOBAL sub adasda() dim num, temp num=1 temp=0 BASE(0) REGIST(100+3,0,100)AXIS(0)' 自动循环,不需要再写入到while循环中,table(0)保存锁存次数,table(1-100)存储每次锁存的数据超过99次后,table(0)清0,重新从table(1)记录数据 'REGIST(3) WHILE 1 ?"*********************************************************" WA 10 ?"reg_pos="REG_POS,"锁存值TABLE="TABLE(num),"占用TABLE="TABLE(0) '打印 ?"驱动器探针模式="NODE_PDOBUFF(0,0,$60B8,0,6) ?"驱动器探针状态="NODE_PDOBUFF(0,0,$60B9,0,6) ?"驱动器锁存值="NODE_PDOBUFF(0,0,$60BA,0,7) IF num=100 THEN num=1 ELSE num=num+1 ENDIF WA 100 '延时1ms,防抖 wend ENDSUB
采用连续锁存模式REGIST(100+3,0,100),使用TABLE(0)开始的100个空间保存锁存数据,其中TABLE(0)保存的是连续锁存的次数,TABLE(1)- TABLE(99)保存每次锁存的位置。
审核编辑:刘清
-
光纤传感器
+关注
关注
16文章
320浏览量
34960 -
编码器
+关注
关注
45文章
3706浏览量
135755 -
运动控制器
+关注
关注
2文章
418浏览量
24905
原文标题:运动控制器位置锁存功能的应用
文章出处:【微信号:伺服与运动控制,微信公众号:伺服与运动控制】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
运动控制器PSO位置同步输出(一):硬件平台与PSO指令简介

硬件位置比较输出和编码器锁存:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(六)






 工商网监
工商网监
评论