 激光雷达和APD阵列的发展历程及进展
激光雷达和APD阵列的发展历程及进展
激光雷达(LiDAR)广泛应用于航天器导航、安防监控、3D测绘、自动驾驶汽车、军事装备及机器人等领域,具有重要的军事和民用价值。雪崩光电二极管(APD)阵列探测技术在激光雷达的发展过程中发挥着至关重要的作用。
据麦姆斯咨询报道,近日,西南技术物理研究所的研究人员在《激光技术》期刊上发表了题为“APD阵列及其成像激光雷达系统的研究进展”的最新论文,首先介绍了激光雷达和APD阵列的应用背景,其次综述了APD阵列和激光雷达系统的发展历程和最新进展,最后总结了APD阵列探测技术的发展前景和研究趋势。
APD阵列国外研究现状
APD探测器根据探测器的规模经历了单元、线列、小面阵到大面阵探测的发展历程,受限于单元探测器的面积,其应用存在诸多限制,但随着压缩感知理论的成熟和图像处理算法的研究,单元探测技术仍然有应用发展空间。APD线列、阵列探测器是目前激光雷达用探测器的主流发展方向之一,其主要由APD探测器件阵列和读出电路(ROIC)两部分构成。外界环境噪声的影响、APD阵列探测器像素单元的一致性、ROIC通道间的串扰是影响其性能和规模的关键因素。
线性模式APD阵列研究现状
美国先进科学概念公司(ASC)基于线性模式的雪崩光电二极管阵列研制了TigerEYE和DragonEYE闪光激光雷达。
2012年,美国雷神公司为各种应用开发了一系列高性能的脉冲激光雷达雪崩光电二极管阵列,如图1所示,汞镉汞红外雪崩光电二极管阵列的尺寸包括32×2、10×10、2×128、64×48、4×256 和256×256。美国国家航空航天局自主精确着陆和危险探测回避技术项目所使用的雪崩探测器阵列是256×256雪崩探测器阵列,具有70%的量子效率。
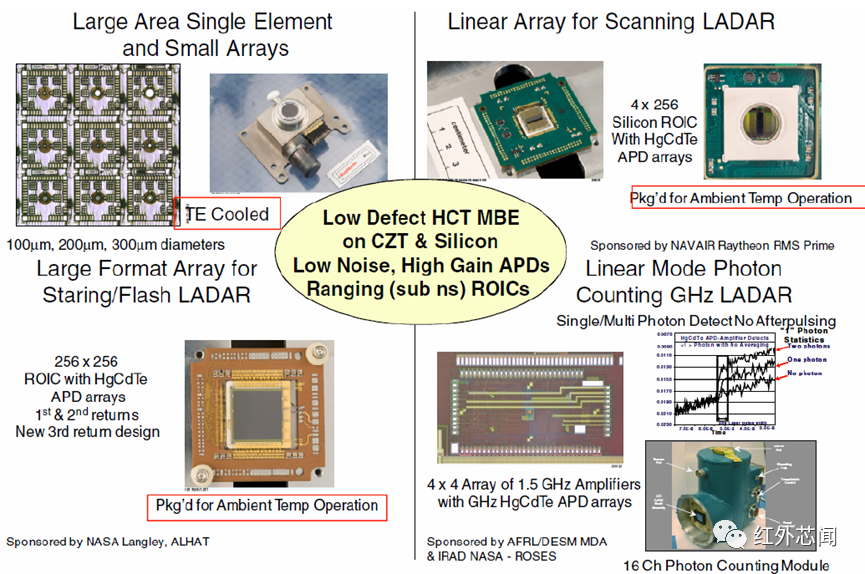
图1 线性模式雪崩光电二极管阵列
2014年,美国DRS公司设计并制作了基于高密度垂直集成结构的2×8线性模式HgCdTe APD阵列。该阵列可以探测从可见光到中频中波红外(MWIR)的光子。此外,还设计了用于近红外门控主动/被动成像的128×128中波HgCdTeAPD阵列。该阵列的探测距离可达9公里,获得了小于10光子的灵敏度。用CEA/LETI研制了一台三维脉冲激光雷达,阵列长度为320×256,间距为30μm。能够存储每个像素中一个激光脉冲的TOF和强度。APD阵列在6V的低反向偏置电压下,获得了23的平均增益。探测距离超过40m,距离分辨率约为15cm。从三维视频中提取的距离图像如图2所示。
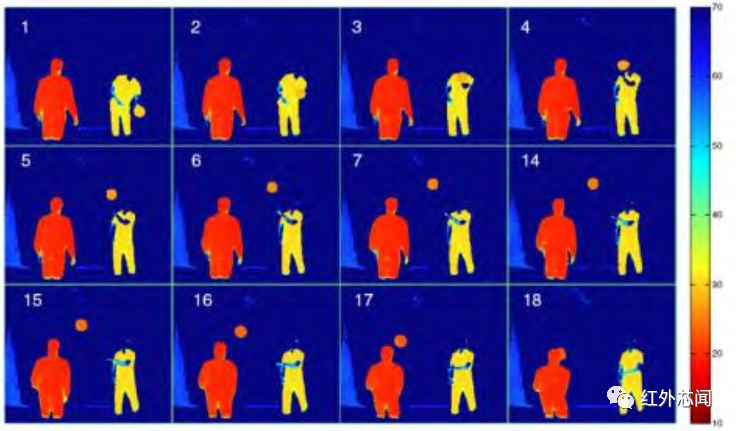
图2 距离图像序列
2019年,美国宇航局的孙晓丽、克雷蒙斯等人开发了一套线性模式单光计数HgCdTe APD焦平面阵列, HgCdTe APD阵列使用高密度垂直集成光电二极管架构,如图3所示。集成探测器(含制冷器)组件的质量为0.8kg,功耗7W左右,2×8像素HgCdTe APD FPA的尺寸为64μm×64μm,像素间距为 64μm,具有0.9~4.3μm波长的光谱响应,在250kHz的暗计数率下,光子探测效率高达70%,时间抖动<0.5ns。
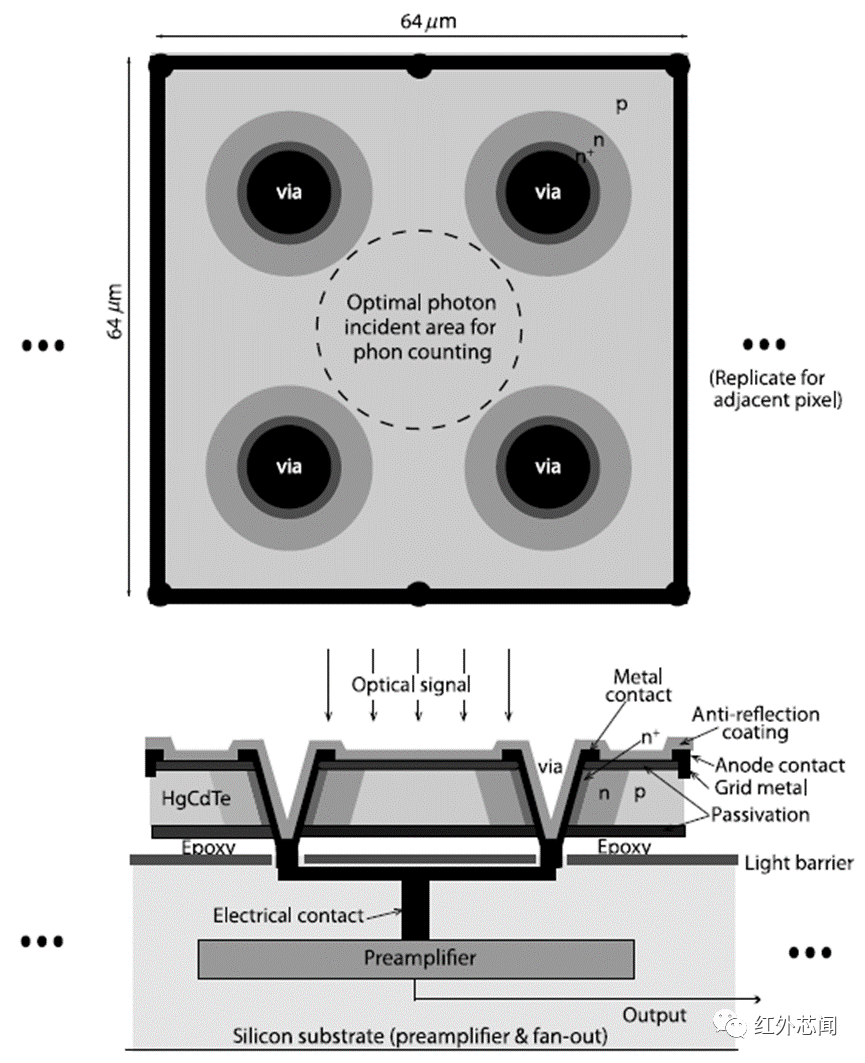
图3HgCdTe APD的像素示意图
2020年,美国宇航局兰利研究中心的普拉萨德、纳拉辛哈等人开发出一种创新的、非致冷的光子传感集成电路(PSIC)异质结光晶体管(HPT)器件。图4展示了FPA的规格和集成的样品,这种基于InGaAs的PSIC HPT设备是一种室温检测器和成像器,具有320×256规模和30μm尺寸的像素,并在0.9~1.7μm的短波红外(SWIR)光谱区域工作。
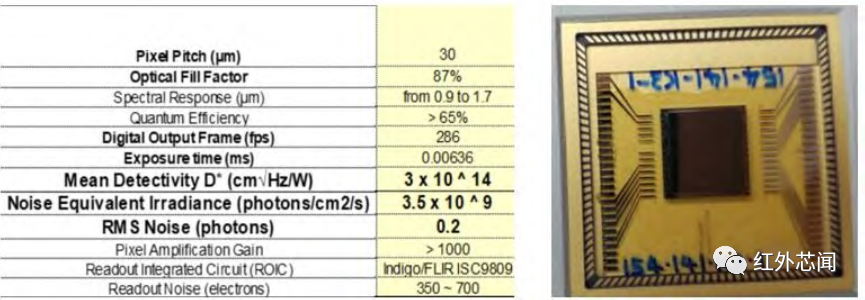
图4 焦平面探测器规格和集成的样品
2021年,美国宇航局的孙晓丽、克雷蒙斯、丹尼尔等人开发了一种新型太空激光雷达;它使用了2×8线性模式光子计数的HgCdTe雪崩光电二极管(APD)焦平面阵列探测器如图5所示,提供了0.9~4.3μm波长的近量子限制的接收器灵敏度。通过调整激光功率和APD增益,可以提供六个数量级的动态范围,能够测量从数百公里到目标表面附近的范围和表面反射率。
盖革模式APD阵列研究现状
盖革APD阵列可实现单光子探测的灵敏度,具有高的时间分辨率和距离分辨率,较高的探测效率,较低的功耗,体积小,增益高等特点,可以满足远距离高分辨率三维成像激光雷达的应用需求。
1998-2003年林肯实验室采用混合集成技术连续研制了GEN-I、GEN-II、GENIⅡ激光雷达。如图6所示,GEN-III将32×32 APD阵列和32×32 CMOS计时电路阵列混合集成。2010年,该实验室采用32×128的InP/InGaAsP盖革APD阵列研制出机载三维成像激光雷达,能够全天时在3km高空对地面进行2000km²/h的快速三维成像,距离精度为0.3m。2015年,该实验室研究出近红外波段响应性能更佳的256像元×256像元InP/InGaAs-APD阵列。
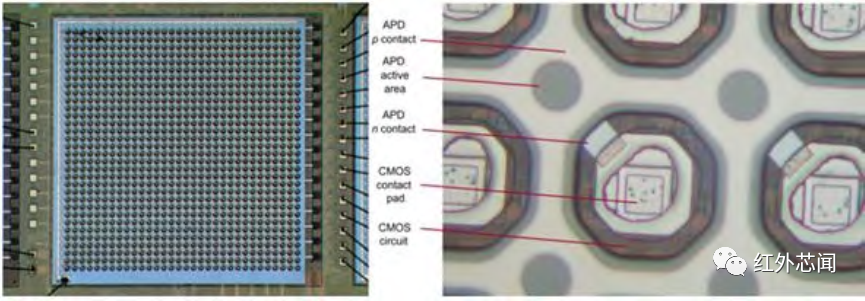
图6 混合集成APD/CMOS器件的显微照片
2014年,瑞士洛桑联邦理工大学报道了一种基于0.18μm CMOS工艺的202像元×96像元SPAD阵列片上系统(SOC)探测器。在强太阳背景光下以10帧/秒的速度在100米范围内获得了实时、准确的距离图像,分辨率为202像素×96像素。图7左展示了它的系统芯片架构,图7中为探测器的芯片照片,图7右最上面部分为颜色编码TOF距离成像,中间部分为信号稳定性测量结果,最下面为摄像头拍出的照片,可以清晰辨别出图中的人物和车子。
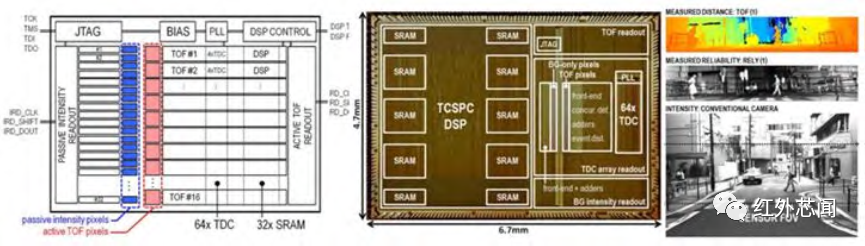
图7 SOC探测器
2019年,英国的爱丁堡大学的山姆·哈钦斯等人报道了一种集成在三维叠层90nm 1P4M/40nm 1P8M工艺中的256×256单光子雪崩二极管(SPAD)传感器,如图8所示,用于LiDAR或高速直接TOF三维成像。传感器底层由64×64个间距为36.72μm的模块化光子处理单元组成,这些单元由共享的4×4个SPAD以9.18μm的间距和51%的填充系数运行。
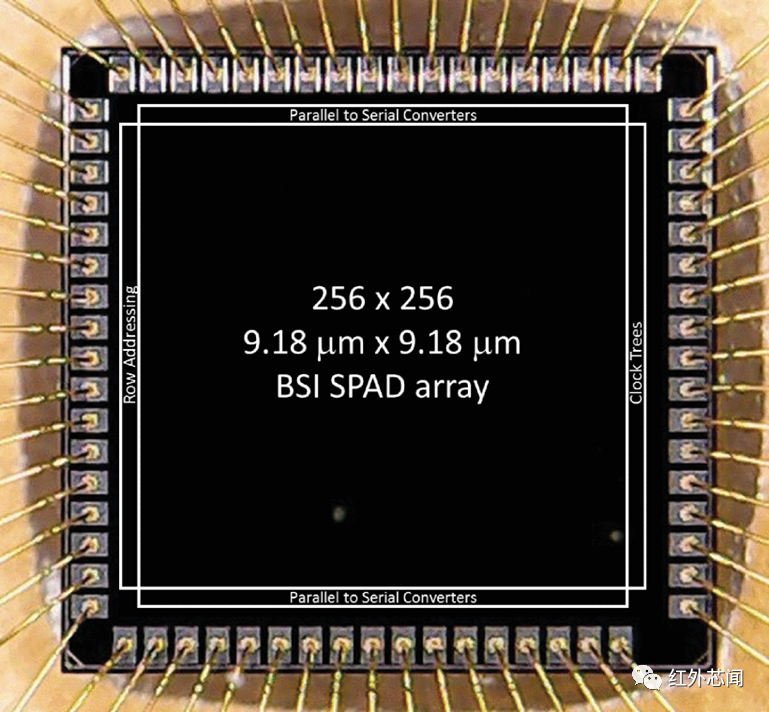
图8 阵列照片
2020年,美国Acqubit的袁平等人开发了一种具有衬底去除结构的GaAs基InGaP雪崩光电二极管,制作了32Gm×32Gm APD阵列,并与ROIC进行了集成,芯片尺寸约为3.75mm×3.75mm,比显微镜的正常视场(FOV)大。在室温下,在50μm器件上测得的暗电流小于10pA。在532nm处,AR涂层器件的外部量子效率约为54%。图9展示了它的焦平面图片。
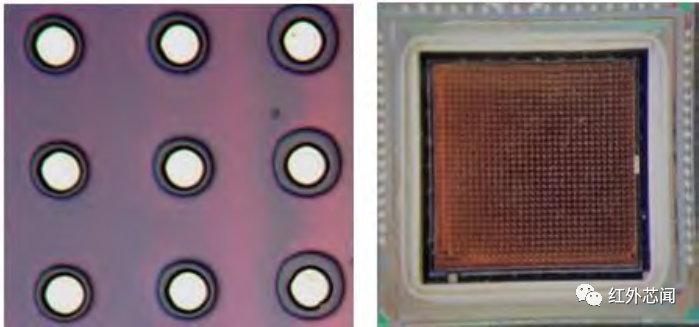
图9 32×32阵列和焦平面
2022年,瑞士洛桑联邦理工学院工程学院的赵久轩等人提出了一种基于标准 55nm Bipolar-CMOS-DMOS (BCD) 技术的模拟硅光电倍增管(SiPM),并且将SiPM集成到带有时间相关单光子计数(TCSPC)模块的同轴LiDAR系统中。SiPM由16×16 SPAD组成,尺寸为0.29mm×0.32mm。每个SPAD单元由一个3.3V的单片集成MOS管被动熄灭,在5V偏置电压下测得的增益为 3.4×10⁵。在3.3V偏置电压下,单光子计时分辨率为185ps,多光子计时分辨率为120ps。在室内环境光条件下,25m距离测量时的精度为2cm和2mm。如图10所示,在同轴扫描的情况下,128×256和256×512分辨率的复杂场景的强度和深度图像。
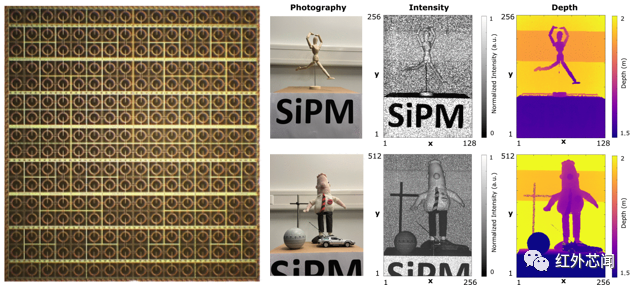
图10 SiPM阵列图和深度强度图像
APD阵列国内研究现状
线性APD阵列研究现状
2016年,南京大学开发了一种新型的激光雷达系统,该系统使用4个线性模式APD探测器。利用调制和多路复用技术,仅利用1×4个线性模式APD探即可实现每帧256个像素的检测,脉冲激光闪光激光雷达的横向分辨率约为15cm,测距精度约为4cm。
2018年,中国西南技术物理研究所研制了一种64×64线性模式InGaAs/InP 雪崩光电二极管阵列 ,与专用CMOS集成电路通过In柱倒装互联工艺混合集成的方式形成了LMAPD-FPA器件。该阵列的最小探测功率为400nW,读出电路的时间分辨率为1ns。脉冲激光波长为1064nm,脉宽为5ns,单脉冲能量为100mJ,重复频率为20Hz。检测范围为1公里,精度为15厘米。
2018年,北京理工大学提出了一种受复眼和人眼启发的新型脉冲激光三维成像系统如图11所示。接收光学系统由18×30个微透镜组成,分布在曲面上,模拟复眼的大视场特征,整个视场达到52°。
图11 北京理工大学研制的脉冲激光闪光激光雷达原理图
2020年,重庆光电技术研究所设计了128×2线性模式硅基雪崩光电二极管阵列。读出电路采用单片集成技术,将前置放大电路、TDC计时电路和ADC等功能模块集成在单一硅片上。整个线性模式APD焦平面探测器可实现128×2 阵列规模的激光信号并行检测。最小时间分辨率可达0.25ns,APD焦平面探测器的非均匀性为7%,串扰为0.15%。
盖革模式APD阵列研究现状
2016年,哈尔滨工业大学研制的闪光激光雷达采用第四十四研究所研制出的 32像元×32像元的InGaAsGm-APD焦平 面 探 测 器。脉冲激光波长为1570nm,脉冲能量为2mJ,脉冲宽度小于10ns。测量范围距离可达3.9公里,帧速率为1kHz。
2019年,中国电子科技集团公司第三十八研究所研制了一种基于64×64 InGaAs盖革模式雪崩光电二极管阵列的闪光激光雷达,其波长为1064nm,读出电路的时间分辨率为2ns。实现了对大约300米外的目标进行成像。
目前国内对于SiPM器件的研究报道比较少,2018年,华中科技大学张玺等人基于0.18μm标准CMOS工艺的研制了SiPM器件;2020年,北京师范大学新器件实验室成功研制出微单元尺寸为15μm、有效面积为9mm²的外延电阻淬灭型硅光电倍增器。
总之,国外对激光雷达的研究较早,在探测器技术方面有较多的技术储备,目前研究的方向主要是提高探测器规模和成像性能,并实现大面阵,小型化、多波段、高帧频及低功耗。在探测器技术研究方面,国内与国外仍然存在着一定的差距,由于大规模的APD阵列探测器对各方面技术的要求高,在制作上更难实现,特别是由于半导体工艺的限制以及国外的技术封锁,国内研究单位多集中于线列和小面阵探测的阶段,需要进一步推进大面阵APD阵列探测器研制,提高激光雷达的集成性,实现快速三维成像。
总结
随着激光器和探测器技术的不断发展,成像激光雷达逐渐从小面阵扫描和线阵推扫式及面阵闪光成像发展,成像速度越来越快;随着光电探测技术的成熟,探测灵敏度越来越高,使得激光雷达的体积、重量、功率进一步减小;这就要求探测器技术朝着增大阵列规模,减小像元间距,提高多功能集成度,丰富探测波段,超低功耗的方向发展。因为激光容易受到大气状况的干扰,现代探测技术的发展趋向于多种传感器的融合探测获取更丰富的目标信息,三维成像趋向于主动多回波探测和被动成像相结合。
审核编辑:郭婷
-
探测器
+关注
关注
14文章
2641浏览量
73026 -
激光雷达
+关注
关注
968文章
3972浏览量
189918
原文标题:综述:APD阵列及其成像激光雷达系统的研究进展
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
激光雷达会伤害眼睛吗?

激光雷达的维护与故障排查技巧
激光雷达技术的基于深度学习的进步
激光雷达技术的发展趋势
光学雷达和激光雷达的区别是什么
一文看懂激光雷达

爱普生IMU产品在激光雷达测绘中的应用

卷上天的激光雷达,现在发展到哪一步?研报推荐

基于FPGA的激光雷达控制板

硅基片上激光雷达技术综述

硅基片上激光雷达的测距原理

激光雷达的探测技术介绍 机载激光雷达发展历程

激光雷达LIDAR基本工作原理






 工商网监
工商网监
评论