 谈一谈决策规划在量产自动驾驶中的挑战
谈一谈决策规划在量产自动驾驶中的挑战

量产自动驾驶简介
量产自动驾驶目前分为跨越式和渐进式两类。跨越式的是希望一步到位直接做L4级别的自动驾驶,主要有两个点:
第一个是需要有一个特殊的车辆,泛指经过一些做L4的自动驾驶公司改装后的特殊车辆。
第二个是需要有一个特殊的场景,指用高精度地图或一些事先规划好的地域逐渐实现从a点到b点的全自动驾驶。渐进式是先做辅助智能驾驶系统,再迭代实现L4级别的自动驾驶。
随着行业和产业的不断发展和成熟,L2+的辅助驾驶近几年有了一些不错的成果。L2+量产自动驾驶的主流功能有3个:行车辅助、泊车辅助和主动安。行车辅助里包括车道保持、拨杆变道、导航辅助驾驶等;泊车辅助里包含车位博入、智能召唤、记忆泊车等;主动安全包含防撞辅助、车道辅助、车速辅助等。
辅助的概念实际上是人机共驾,即当司机在开启辅助驾驶的时候,同时人也会通过方向盘和油门对车辆进行控制。
L2+和L4 Planning的差异
做量产自动驾驶的思路跟L4不一样的地方在于L4是怎么样去取代人类司机来开车,而量产自动驾驶思考的角度是让人开车时更加的安全和轻松,所以替人开车这块的能力实际上跟L4是差不多,但量产自动驾驶里面会包括更多的东西。
其中一个主动提示/接管现在的思路是希望结合比较强大的一个感知和规控的能力,把辅助驾驶变成汽车软件层面的安全带。
L4级别的自动驾驶是能够在没有接管的各种路况下很好的驾驶车辆,实际有两个很重要的前提:第一个是需要事先标注好的高精度地图,第二个是对于交通参与者以及路面上的一些元素基本上都是一个非常完美的感知状态。但实际上做L2+的时候,这两个先决条件不一定成立,一旦离开了高精度地图或者没有一个完美感知的时候,该系统表现出来的能力还能像L4一样。
高精度地图在当前的情况下存在着两个最大的问题:第一个是制造的成本很太高,导致覆盖率很低。第二个是地图更新做不到实时。覆盖率低的问题还涉及到产品本身的问题,因为使用自动驾驶能力的一些目标客户并不是都在有高精度地图覆盖的一线城市,可能也存在于一些三、四线城市。
同时这些一线城市并不是所有路段都会有高精度地图覆盖。第二个是即便该路端覆盖了高精度地图,但其本身也不是扫描一次就足够,因为真实道路是每时每刻都会发生变化,因此,后期也需要不停的通过手工或半自动的方式去不断的更新和维护这些地图。另外一个是感知的不确定性,不确定性主要是来自于上游的感知,实际上感知在通过激光雷达或视觉方案给出的时候,和真值会有一些偏差以及时序上的抖动。
辅助驾驶里最基本的一个能力就是车道保持,即驾驶员不用扶着方向盘,车辆也能准确的行驶在车道中间。在没有高精度地图的情况下,车道线主要依靠视觉生成。实际上,这些车道线不可避免的会存在一个特性:离车越远的车道线,感知误差会越大,如图1所示。还有是感知道的两帧之间会存在一定的偏差,导致方向盘会不断的抖动。
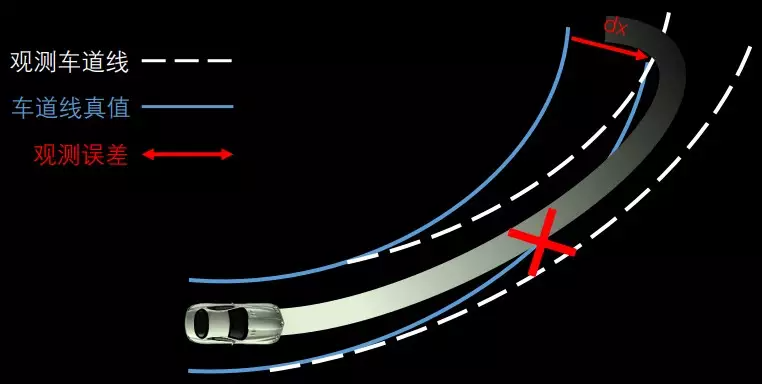
图1 观测车道线与真值误差
Contingency Planning
量产自动驾驶的两个基本是安全性和舒适性。但这两个指标实际上是相悖的,因此思考的问题是:如何在没有好的感知情况下,做一个兼顾安全性和舒适性的自动驾驶产品。
做决策规划最实用的两点是:第一是完备性,即尽可能的扩大解空间;第二是最优性,即提升解的质量。
Contingency Planning(防御性规划)能够对危急情况随时做出有效的反应。实际上可以用多模态的问题解决,包括自车的多种可行解以及他车的多种意图预测。举一个常见的例子:假设本车发现前面停下一辆车,一般会决策出左绕还是右绕。传统的做法是假定开始选择左绕,可能更加符合人的预期,当车开到新的位置,
上游会重新给一个关于车的新位置估计,这时再次进行判断继续左边还是右边,不巧,左边发现新的障碍物,决策出需要右绕通行。所以在极端的情况下,最后会出现摇摆不定,画龙的问题。
目前主流的做法是做一些输入倾向的提升,这样只缓解了合法方向的问题,并没有真正意义上解决问题,因为当前车被检测出来的这一帧,实际上就已经开始对未来的预期做了一个决策。
目前比较习惯于把轨迹当成一个链式模型进行处理,但真正实用的可能是树模型,如图2所示。
每个树模型分叉的节点叫branch state,同时可以在任意的节点分叉,所以该模型比较的灵活。所以利用该模型来做刚刚的案例,开始选择在离障碍物有一定距离时分叉一下,这样就是由两段组成:第一段是公用的部分,第二段是分开的部分。然后以此来分叉判别可以保证方向盘不太会左右晃。即便出现了新的障碍物位置,也可以继续用轨迹优化。
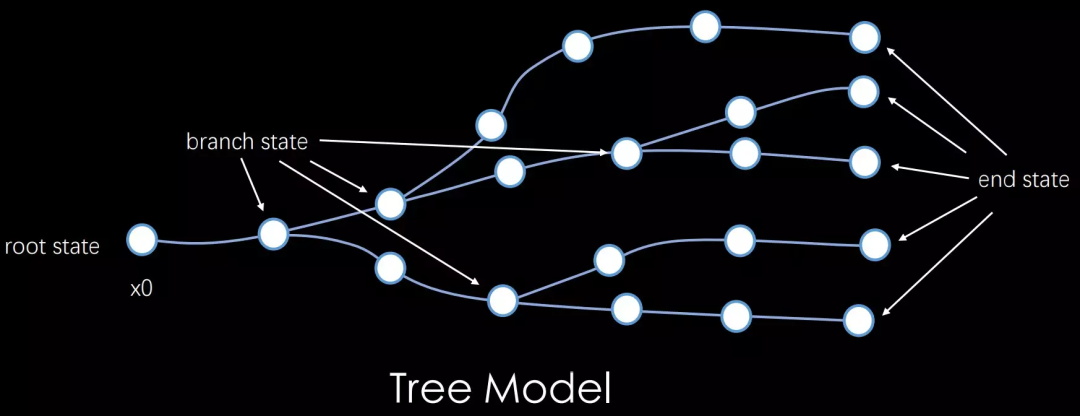
图 2 树模型
还有一个很在意功能是加塞应对,即当车辆驾驶时,旁边开过来一辆车,是需要继续车道保持还是减速/变道处理。传统方案对加塞概率进行判定,当大于阈值的时候则会考虑减速/变道处理,这时车就开始减速处理,如果小于阈值,则继续车道保持。
但加塞和不加塞的概率各占一半的时候,很容易出现决策上的跳动,导致用户体验不好。
自动驾驶方法的加塞处理如图3所示。如果加塞就会开始减速,然后再提速进行跟车,如浅绿色线所示。图下方是加速度曲线,加速度为0则对应匀速直线行驶,应对加塞时再减速。
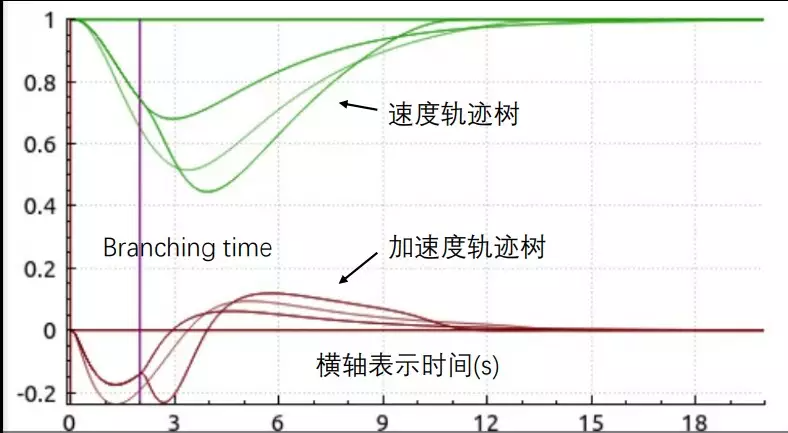
图3 轨迹树的加塞处理
Risk-Aware Planning
Risk-aware的概念是保证自动驾驶从a点到b点上整个的安全性。一般通过保证每一帧规划轨迹是安全的得以实现,实际上有个问题:保证自动驾驶整个周期的安全性需不需要保证每一帧轨迹的安全性?
通常考虑两个点:第一,轨迹规划不能撞上一些静态的障碍物,比如马路边、静止车等。第二与交通参与者的交互有关,比如车辆、行人等交通参与者的未来行为会随着自车的决策规划而产生变化。
传统系统的考虑方式是,当前方突然出现一脸车,那会规划出一个预测轨迹,再根据预测轨迹在时空域规划出对应的障碍物,然后规划出一个不会相撞的轨迹。但当舒适性和安全性出现一定冲突的时候,这样的规划思路比较保守。实际上要保证整个自动驾驶周期的安全性,单帧轨迹的规划性是更高的。
具体来说,预测往往具备一个特性:预测时间越往后,置信度越低。也就是在预测初期是不可能相撞的(比如2秒内),那2秒后是不是可以允许适当的接触,同时让规划出来轨迹的舒适性和安全性之间达到平衡,从而保证整个自动驾驶的安全性。
审核编辑 :李倩
-
高精度
+关注
关注
1文章
867浏览量
27136 -
自动驾驶
+关注
关注
795文章
15012浏览量
181715
原文标题:谈一谈决策规划在量产自动驾驶中的挑战
文章出处:【微信号:eng2mot,微信公众号:汽车ECU开发】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
预期功能安全是什么?(上)
自动驾驶横向与纵向控制模块各有什么作用?
贸泽电子自动驾驶汽车在线资源中心助力解决实际部署面临的各项挑战
全局定位和局部定位在自动驾驶中各有什么作用?

自动驾驶汽车如何完成超车?

自动驾驶汽车如何实现自动驾驶

规划模块在自动驾驶系统中主要干了啥事?
VLA能解决自动驾驶中的哪些问题?

语言模型是否是自动驾驶的必选项?

什么是自动驾驶决策系统?发展有何挑战?

无引导线的左转场景下,自动驾驶如何规划轨迹?

端到端自动驾驶相较传统自动驾驶到底有何提升?

自动驾驶中感知、决策、控制都起到什么作用?

自动驾驶汽车是如何准确定位的?




评论