 厦门大学:给机器人穿上灵敏“皮肤”!柔性触觉传感器研究有了重要进展
厦门大学:给机器人穿上灵敏“皮肤”!柔性触觉传感器研究有了重要进展
让智能机器人灵活自如地工作,少一些“违和感”,触觉传感器起着至关重要的作用。近日,厦门大学航空航天学院周伟教授团队在柔性触觉传感器研究领域取得重要进展,提出可以实现超灵敏高频动态力检测的柔性触觉传感器新工作模式,突破传统传感器灵敏度的理论极限值。这意味着,借助该传感器,机器人操作灵巧度将大幅提升,相关研究成果发表在《自然·通讯》上。
机器人倒水如何实现?接触杯子、开始倒水、判断接水量、接几分满、送到指定位置、放下杯子……这些再平常不过的步骤对智能机器人而言却是个考验。当一款柔性传感器贴附于机器人手臂时,机器人整个倒水的动态过程都被精确地检测到,使它做出连贯流畅的类人操作。这样的场景在周伟团队的实验室反复验证多次。
周伟介绍,触觉传感器相当于智能机器人的“皮肤”,起着接收指令的重要作用,是执行精准操作的前提,传感器越灵敏,类人操作就越灵巧。目前在智能机器人动态力检测应用中常使用的压电式柔性触觉传感器受限于自身灵敏度理论极限值,智能机器人通过“皮肤”接收指令并执行操作的灵巧度并不如人意。为此,团队长期致力于研究灵敏度更高、类人感知的传感器。
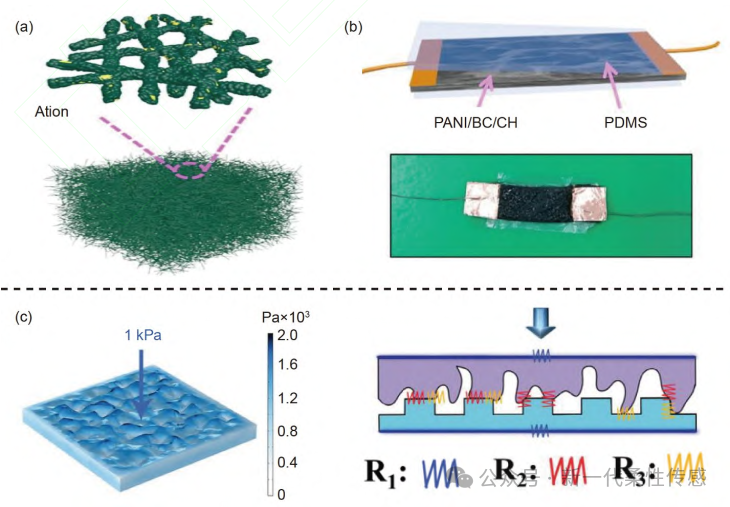
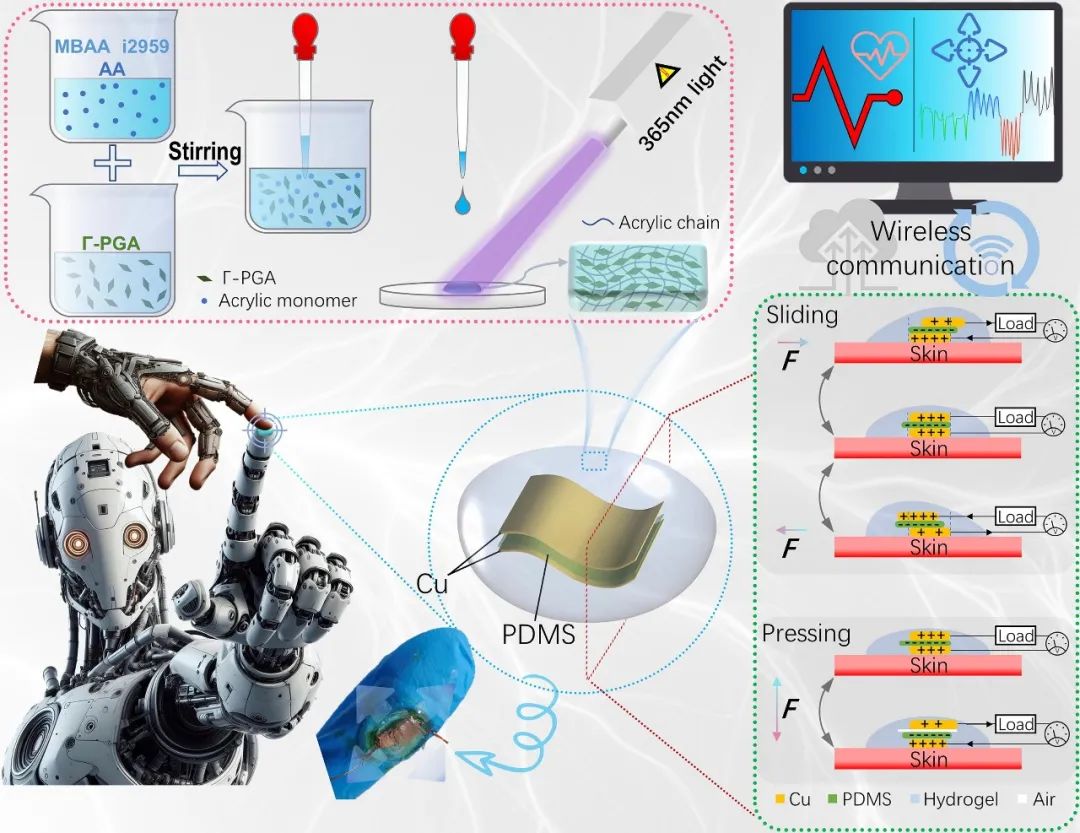
研究人员受节肢动物结构组成的启发,提出构造一种仿生型柔性触觉传感器,能精确感知外界作用力大小和方向,实现超灵敏高频动态力检测。柔性的基体加上刚性的微结构,这一研究的关键在于利用新材料构建出这种类节肢动物“刚柔并济”的结构。
团队成员厦门大学航空航天学院机电工程系博士后张金惠介绍,团队两年来化身“材料专家”以及“排列组合专家”,一直在环氧树脂、石蜡、聚二甲基硅氧烷、硅胶等材料中摸索,反复寻找最佳组合方案,最终摸索出完美融合的“刚柔并济”结构。这一成果为智能机器人“皮肤”提供了全新的工作模式,大大提升了智能机器人“皮肤”的灵敏度。
该研究提出的这种仿生型“刚柔并济”柔性触觉传感器,不仅提升了柔性材料的力传递效率,而且颠覆了传统压电式柔性触觉传感器的工作模式,使传感器灵敏度可达到理论极限值的17倍,并具有5−600Hz宽带宽、0.009−4.3N线性检测范围和实时力方向识别的优异性能。
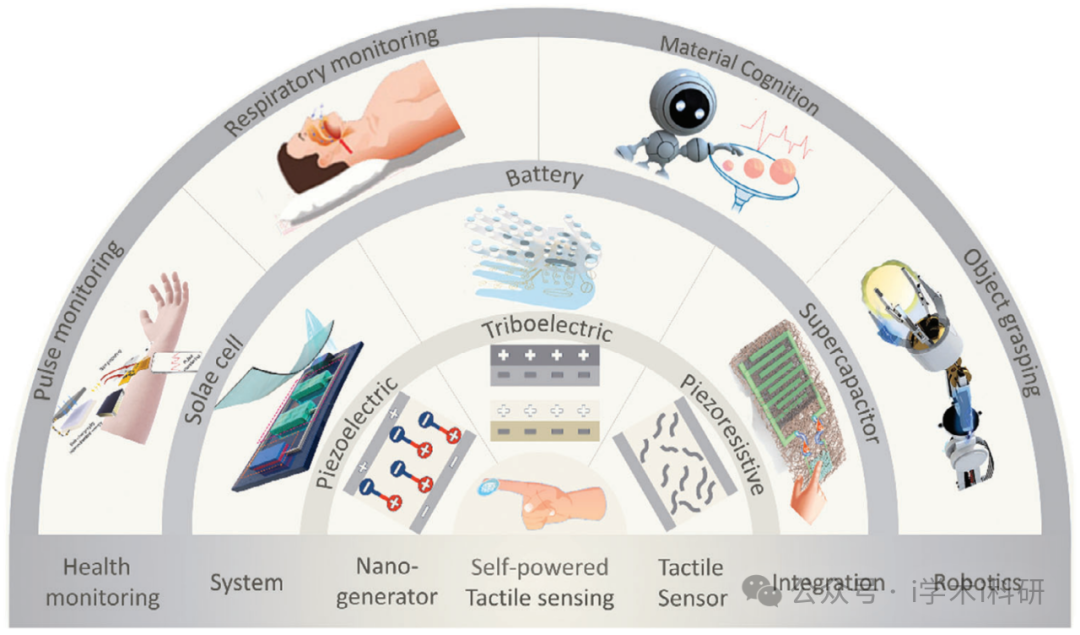
研究人员介绍,该成果为压电式触觉传感器的深入研究提供了新方法和新思路,尤其是对智能机器人建立类人的触觉感知系统具有重要的理论研究价值和意义。“未来,该触觉传感器不仅适用于智能机器人,也有望在医疗、汽车、可穿戴设备等领域进行运用。”周伟说。
传感动态
【英飞凌携手湃安德为Magic Leap 2开发3D深度传感技术,赋能尖端工业和医疗应用】
增强现实(AR)应用将从根本上改变人类的生活和工作方式。预计今年下半年,AR领域的开拓者Magic Leap将推出其最新的AR设备Magic Leap 2。Magic Leap 2专为企业级应用而设计,将成为市场上最具沉浸感的企业级AR头显之一。Magic Leap 2符合人体工学设计,拥有行业领先的光学技术和强大的计算能力,能够让操作人员更高效地开展工作,帮助公司优化复杂的流程,并支持员工进行无缝协作。Magic Leap 2的核心优势之一是采用了由英飞凌科技股份公司(FSE: IFX / OTCQX: IFNNY)和湃安德(pmd)共同研发的3D间接飞行时间(iToF)深度传感技术。
Magic Leap 2展示了REAL3 3D图像传感器的潜力。经过改进的全新IRS2877C飞行时间成像仪,可以捕捉到用户周围的物理环境,帮助设备感知和理解周围的环境并最终与其进行互动。凭借出色的VGA分辨率,该3D成像仪能探测许多不同物体的细节。
英飞凌和湃安德共同开发的飞行时间技术,可实时创建精确的环境3D图以及人脸、手部细节或物体的3D图像。这一先进技术能够支持Magic Leap 2实现与周围环境的精确互动。此外,该传感器还可以支持Magic Leap 2实现增强的手势控制功能。英飞凌和湃安德对3D传感器进行了优化,将其功耗降到了最低,从而减少发热,并延长Magic Leap 2的电池续航时间。
Magic Leap首席技术官Julie Green表示:“精确和实时地感知周围环境是增强现实应用的关键。Magic Leap 2将带来更加沉浸式的用户体验。这些卓越的功能将助力物理世界与数字世界之间实现更加无缝的连接。”
英飞凌科技首席营销官兼电源与传感系统事业部总裁Andreas Urschitz表示:“我们将3D成像技术引入了对精准度和可靠性要求非常高的专业环境中。最新的3D飞行时间技术将在医疗和工业领域催生出全新的增强现实(AR)和混合现实(MR)应用。它将从根本上改变我们的生活和工作方式。”
湃安德首席执行官Bernd Buxbaum表示:“我们的技术能够助力Magic Leap 2以毫米级精度监测物体在物理环境中的位置变化。利用该技术,可以将虚拟对象放置于现实世界中。当用户在房间里走动时,这些虚拟对象会停留在原地保持不动。当有其他真实物体出现在它们前面时,虚拟对象就会被遮挡住。该技术在明亮的阳光下或完全黑暗的环境中也能可靠地工作,而其他深度传感解决方案在这样的环境下很快就会达到极限。”
越来越多的AR技术将被应用于依赖这些先进技术的工业和医疗环境中。例如,一家位于慕尼黑的数字医疗技术公司Brainlab,将其AI驱动的、针对患者的人体解剖学可视化软件与Magic Leap的空间计算能力相结合,可帮助外科医生更好地了解患者内部的解剖结构。
【华培动力拟取得无锡盛邦58.5%股权 拓展公司传感器事业部战略版图】
华培动力(603121)11月15日晚间公告,公司拟2.51亿元收购无锡盛邦电子有限公司(下称“无锡盛邦”)50.2%的股权,并向其增资1亿元。实施完成后,公司将持有无锡盛邦58.5%股权,无锡盛邦将成为公司合并报表范围内的控股子公司。
无锡盛邦拥有18年的汽车传感器研发制造经验,主要业务包括汽车传感器、新能源产品、ADAS(高级驾驶辅助系统)产品,主要产品为机油压力温度传感器、进气压力温度传感器、速度位置传感器,尿素品质传感器、排温传感器等,是国内商用车传感器领域规模领先的自主品牌。无锡盛邦的主要客户包括潍柴动力、一汽解放、玉柴、云内、康明斯、陕汽、三一重工等国内外领先的柴油机厂商及重卡和工程机械领域的厂商。
无锡盛邦2021年实现营业收入2.61亿元,净利润-1790.82万元,2022年1-6月实现营业收入8969.52万元,净利润-2598.07万元。
华培动力是一家专注于汽车零部件行业的先进制造企业,主要从事汽车零部件的研发、生产及销售。2020年,明确了“积极拥抱汽车智能化、电动化”的战略发展方向,通过收购无锡盛迈克传感技术有限公司(下称“无锡盛迈克”),布局汽车压力传感器、温度传感器等产品线,并将逐步延伸至制造过程中的自动化生产、标定、检测技术的软硬件技术开发,力争为客户提供一揽子解决方案。公司已于2020年12月31日完成了对于无锡盛迈克的并表。
根据华培动力之前的公告,公司拟合计分四期收购相关股东持有的无锡盛迈克100%股权,其中首期收购51%股权,2021年第2期、2022年第3期、2023年第4期分别受让18%、15%、16%的股权。
华培动力今年6月9日公告,近期公司完成了对无锡盛迈克第3期15%的股权收购,无锡盛迈克股权变更工商登记于2022年6月7日完成,收购完成后持有无锡盛迈克股权比例为84%。
华培动力在11月15日晚披露的最新公告中表示,本次交易完成后,无锡盛邦将与公司现有传感器子公司-无锡盛迈克形成协同发展,从而进一步拓展公司传感器事业部战略版图,加快公司战略转型目标的实现。
据介绍,通过本次交易,华培动力多品类传感器的开发能力及市场地位能够得到进一步夯实。传感器品类将涵盖基于陶瓷压阻、陶瓷电容、MEMS压阻及其充油芯体技术和玻璃微熔技术的全量程压力传感器,基于磁电式和霍尔式传感技术的速度、位置类传感器,以及尿素品质传感器、温度传感器等。
【歌尔股份:会积极关注智能无线耳机及相关领域的业务机会】
11 月 17 日消息,今日,歌尔股份在投资者互动平台表示,公司会积极关注智能无线耳机及其相关领域内的业务机会并适时推进。
根据歌尔股份透露的信息,AR 方面,歌尔股份在 AR 增强现实产品及其相关的精密光学零组件和光机模组等领域内进行长期布局。VR 方面,歌尔股份具有针对 VR 虚拟现实产品的 Pancake 折叠光路产品解决方案,并已有大规模量产经验。
谈及业务发展时,歌尔股份表示,公司会继续积极推动以 VR / AR、智能耳机、智能穿戴、智能家居等产品为代表的新兴智能硬件及其相关精密零组件业务的发展。
歌尔股份 11 月 10 日发布公告称,司于 10 月 28 日披露《歌尔股份有限公司 2022 年年度业绩预告》,鉴于公司 11 月 9 日披露的《歌尔股份有限公司风险提示性公告》中提及的事项可能对公司业绩产生影响,公司存在业绩预告修正的可能。
【工信部:围绕人工智能、车联网等重大应用需求,加强与全球集成电路产业界的合作】
11 月 17 日消息,据工信微报,11 月 17 日,2022 世界集成电路大会在安徽合肥召开。工业和信息化部副部长王江平在致辞中表示,集成电路是信息社会的基石,是支撑现代经济社会发展的战略性、基础性和先导性产业。
王江平表示,工信部将强化顶层设计,聚焦重点领域,培育产业生态,推动开放合作,与世界各国共谋创新突破,共享发展成果。坚持融合创新,围绕云计算、大数据、工业互联网、人工智能、车联网等重大应用需求,加强与全球集成电路产业界的合作,推动产业链各环节的创新发展。、
坚持市场导向,充分发挥市场配置资源的决定性作用,以企业为主体,引导产业优化布局,推动要素有序流动、资源高效配置、市场深度融合,进一步优化产业结构,营造良好产业生态。坚持政策协同,落实现有支持集成电路产业发展的政策,加强知识产权保护与运用,着力营造内外资企业一视同仁、公平透明的市场环境。坚持开放共享,进一步加大开放力度,提升国际合作层次与水平,共同抢抓市场发展机遇。
2022 世界集成电路大会由工业和信息化部、安徽省人民政府共同主办,以“合作才能共赢”为主题,聚焦集成电路产业核心问题。设置 1 场开幕式、4 场高峰论坛、10 场主题论坛,涵盖“会、展、赛、训”四大板块。
传感财经
【11月16日传感财经分析:微电机概念报涨,秦川机床领涨;电网传感器概念报涨,航天科技领涨;可穿戴传感器概念报跌,北京君正领跌】
11月16日盘后,微电机概念报涨,秦川机床(11.05,4.84%)领涨,方正电机(8.01,0.13%)、微光股份(29.38,0.1%)等跟涨。
11月16日盘后,电网传感器概念报涨,航天科技领涨,理工光科、友讯达、润欣科技等跟涨。
11月16日盘后,可穿戴传感器概念报跌,北京君正(78.06,-2.1,-2.62%)领跌,晶方科技(-1.41%)、汉威科技(-0.72%)等跟跌。
相关可穿戴传感器概念股:
中航电测300114:
资金流向数据方面,11月16日主力资金净流流出14.12万元,超大单资金净流出203.02万元,大单资金净流入188.9万元,散户资金净流出119.37万元。
从近五年净利率来看,公司近五年净利率均值为14.16%,过去五年净利率最低为2017年的12.11%,最高为2021年的28%。
森霸传感300701:
11月16日消息,资金净流出55.51万元,成交金额1358.9万元。
森霸传感从近五年净利率来看,近五年净利率均值为39.9%,过去五年净利率最低为2017年的33.85%,最高为2020年的46.81%。
京东方A000725:
11月16日消息,京东方A11月16日主力净流入2396.25万元,超大单净流出167.22万元,大单净流入2563.47万元,散户净流出4288.89万元。
从京东方A近五年净利率来看,近五年净利率均值为5.63%,过去五年净利率最低为2019年的-0.41%,最高为2021年的13.88%。
汉威科技300007:
11月16日该股主力资金净流入5.86万元,超大单资金净流入220.2万元,大单资金净流出214.34万
元,中单资金净流出198.63万元,散户资金净流入192.77万元。从近五年净利率来看,近五年净利率均值为8.18%,过去五年净利率最低为2019年的-3.49%,最高为2021年的14.04%。
晶方科技603005:
11月16日该股主力净流出5536.01万元,超大单净流出3456.27万元,大单净流出2079.74万元,中单净流入249.74万元,散户净流入5286.27万元。
从近万年净利率来看,晶方科技近五年净利率均值为24.54%,过去五年净利率最低为2018年的12.56%,最高为2021年的41.01%。
审核编辑黄昊宇
-
机器人
+关注
关注
212文章
28869浏览量
209455
发布评论请先 登录
相关推荐
汉威科技柔性触觉传感器:为人形机器人装上“中国触觉”

清华大学:软体机器人柔性传感技术最新研究进展

中国科大:在机器人触觉传感器研究中取得重要进展

吉林大学:研究具有3D力检测功能的自供电柔性电子皮肤触觉传感器
这批中国企业,在做人形机器人触觉传感器
广东工业大学:用于健康监测和机器人技术的柔性自供电触觉传感最新进展
触觉传感器的发展,对机器人产业有什么影响?
清华大学:软体机器人柔性传感技术最新研究进展



压电薄膜传感器与倾斜传感器提供灵敏的控制能力
基于人体皮肤热感知原理的超高灵敏度柔性温度传感器开发






 工商网监
工商网监
评论