 瑞萨e2studio(7)----ADC通过单次扫描多通道方式采样
瑞萨e2studio(7)----ADC通过单次扫描多通道方式采样
概述
本篇文章主要介绍如何使用e2studio对瑞萨单片机进行ADC通过单次扫描多通道方式采样。 需要样片的可以加qun申请:6_15061293 。
样品申请
https://www.wjx.top/vm/wBbmSFp.aspx#
硬件准备
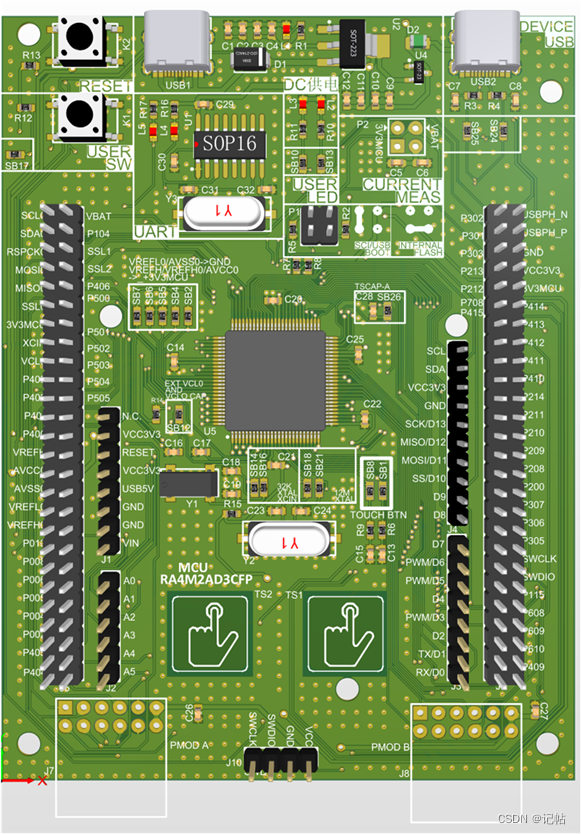
首先需要准备一个开发板,这里我准备的是芯片型号R7FAM2AD3CFP的开发板: 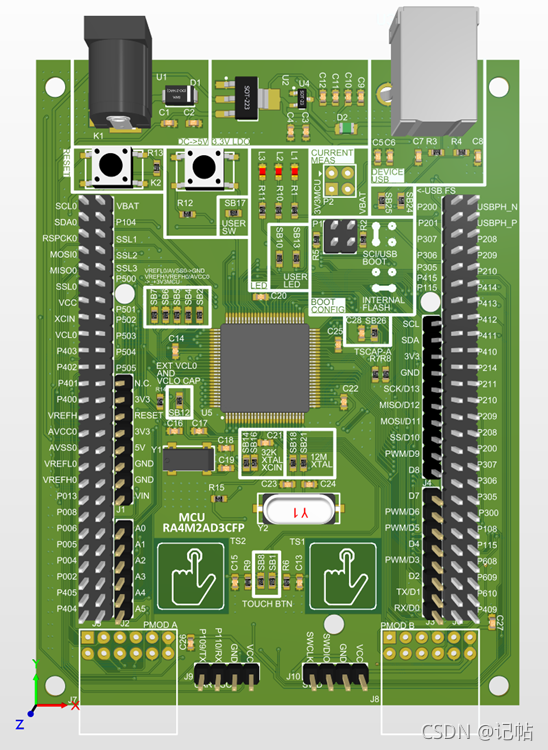
开发板
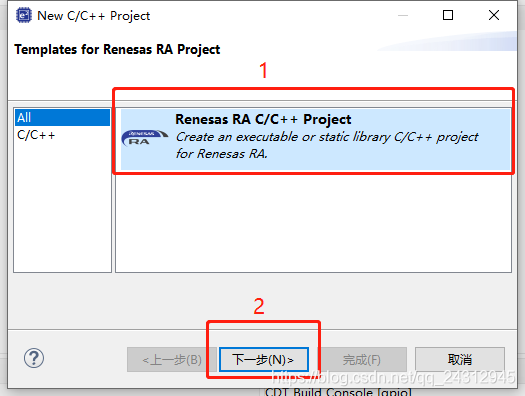
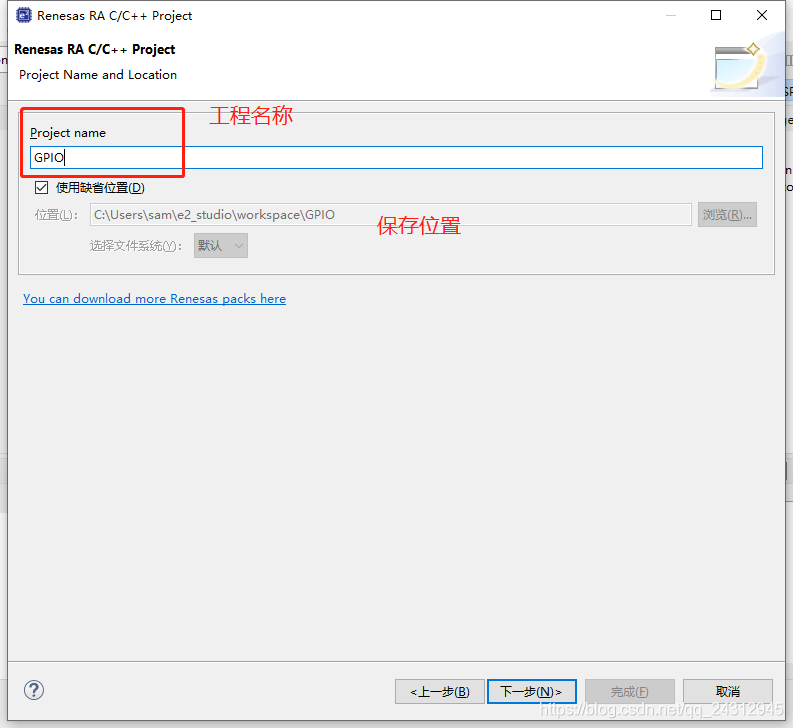
新建工程

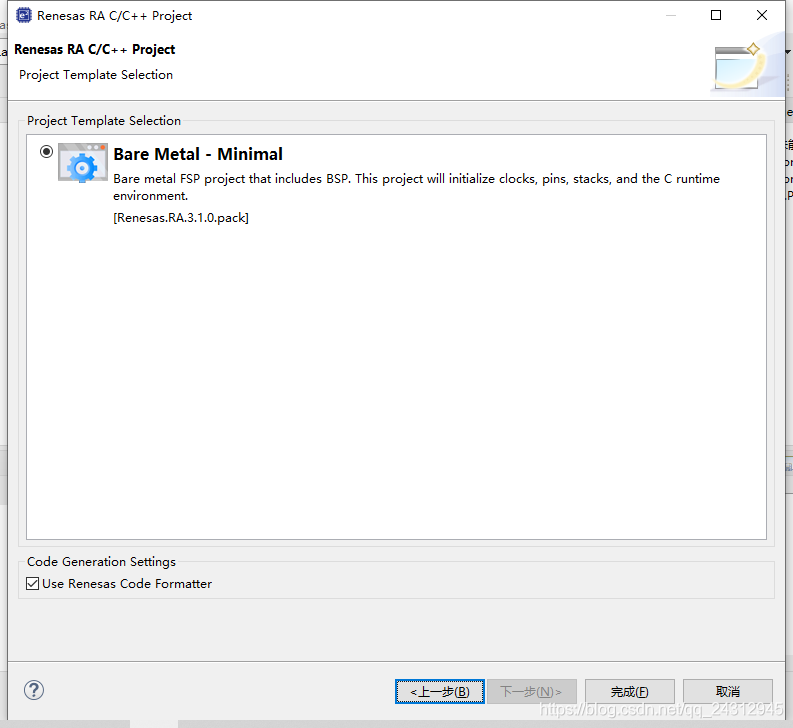
工程模板
保存工程路径
芯片配置
本文中使用R7FA4M2AD3CFP来进行演示。 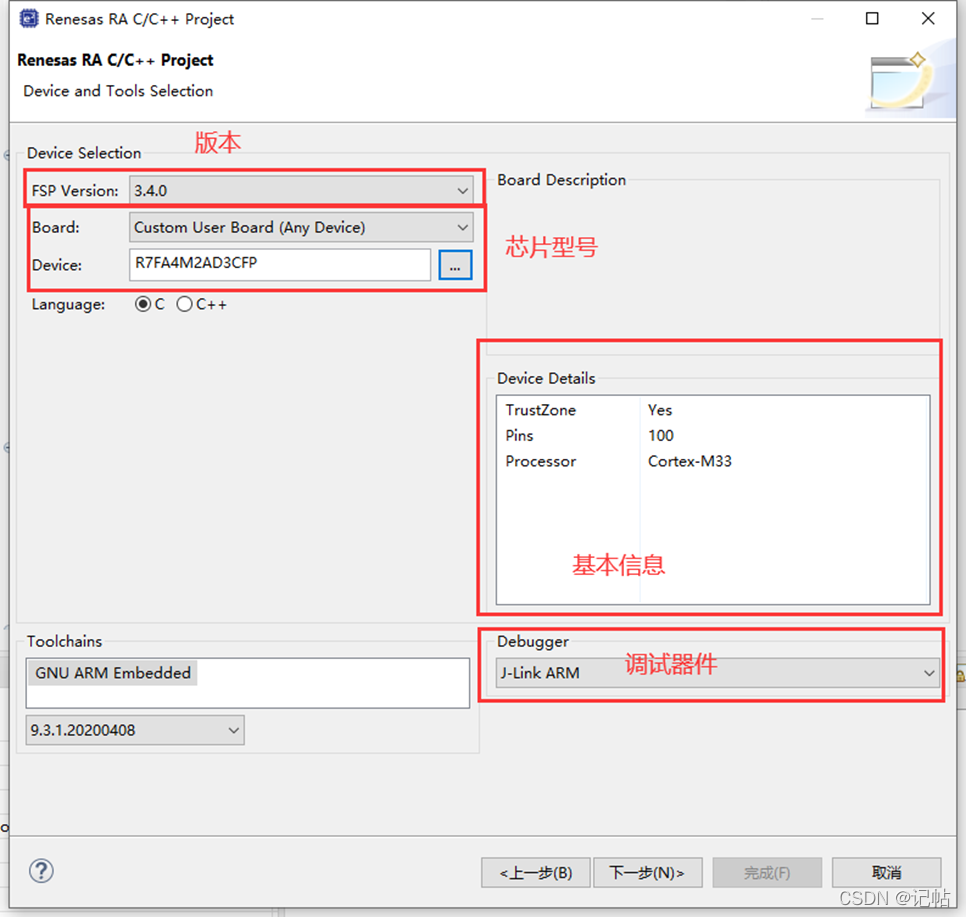
工程模板选择
时钟设置
开发板上的外部高速晶振为12M,需要修改XTAL为12M. 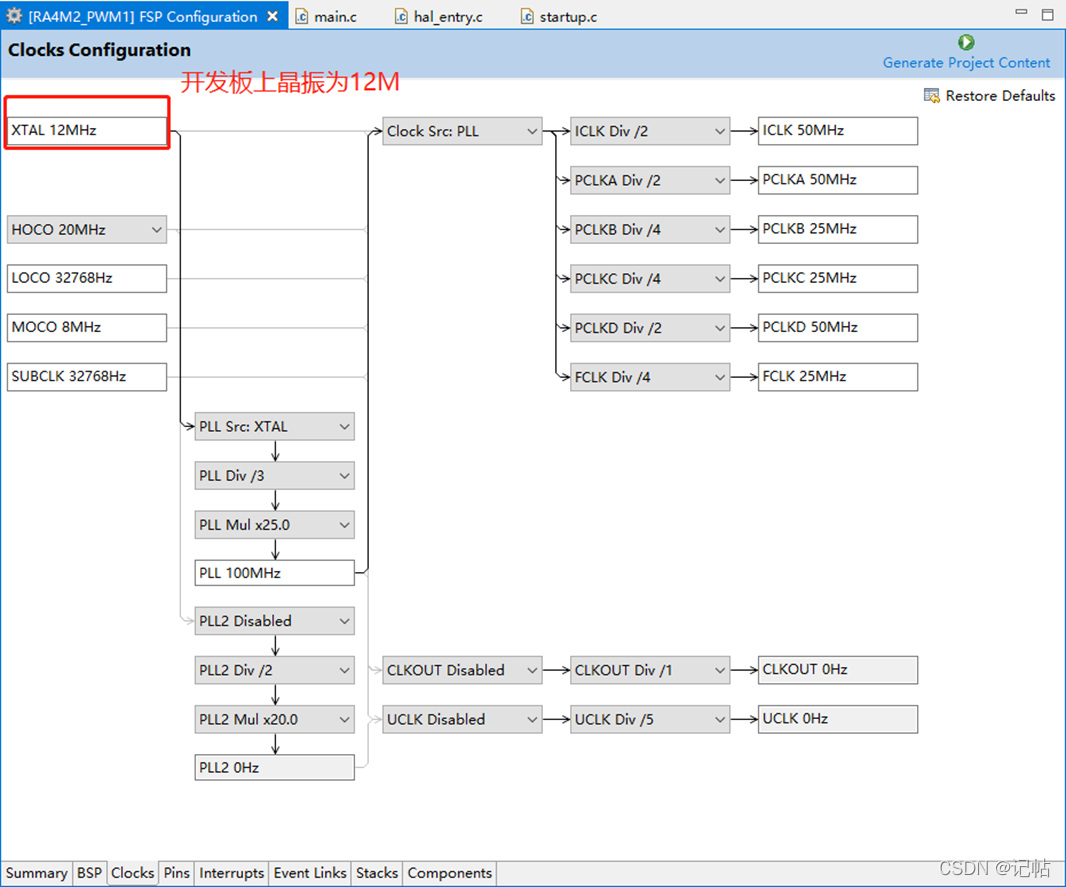
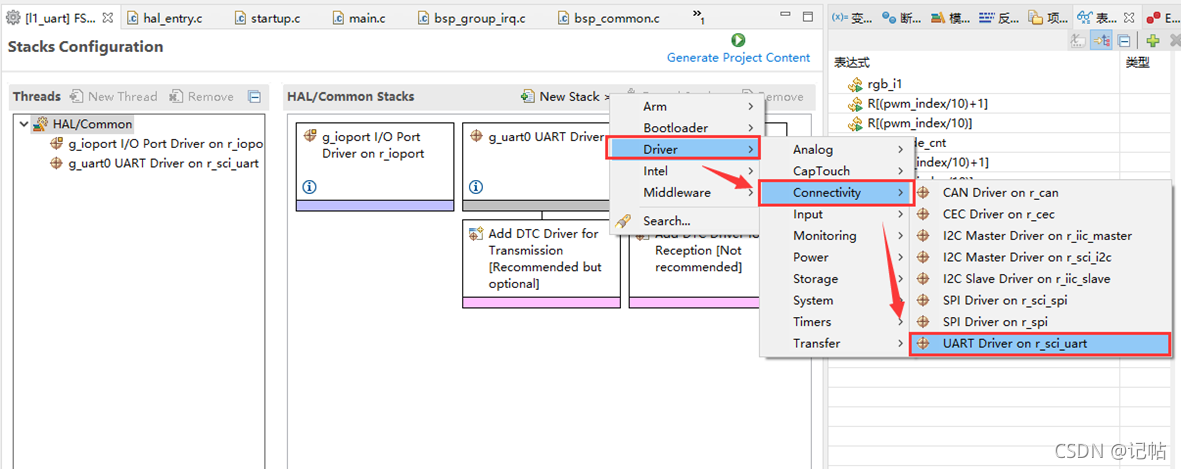
UART配置
点击Stacks->New Stack->Driver->Connectivity -> UART Driver on r_sci_uart。
UART属性配置
由于开发板的typc-c接口所接的是串口9,故配置为通道9。 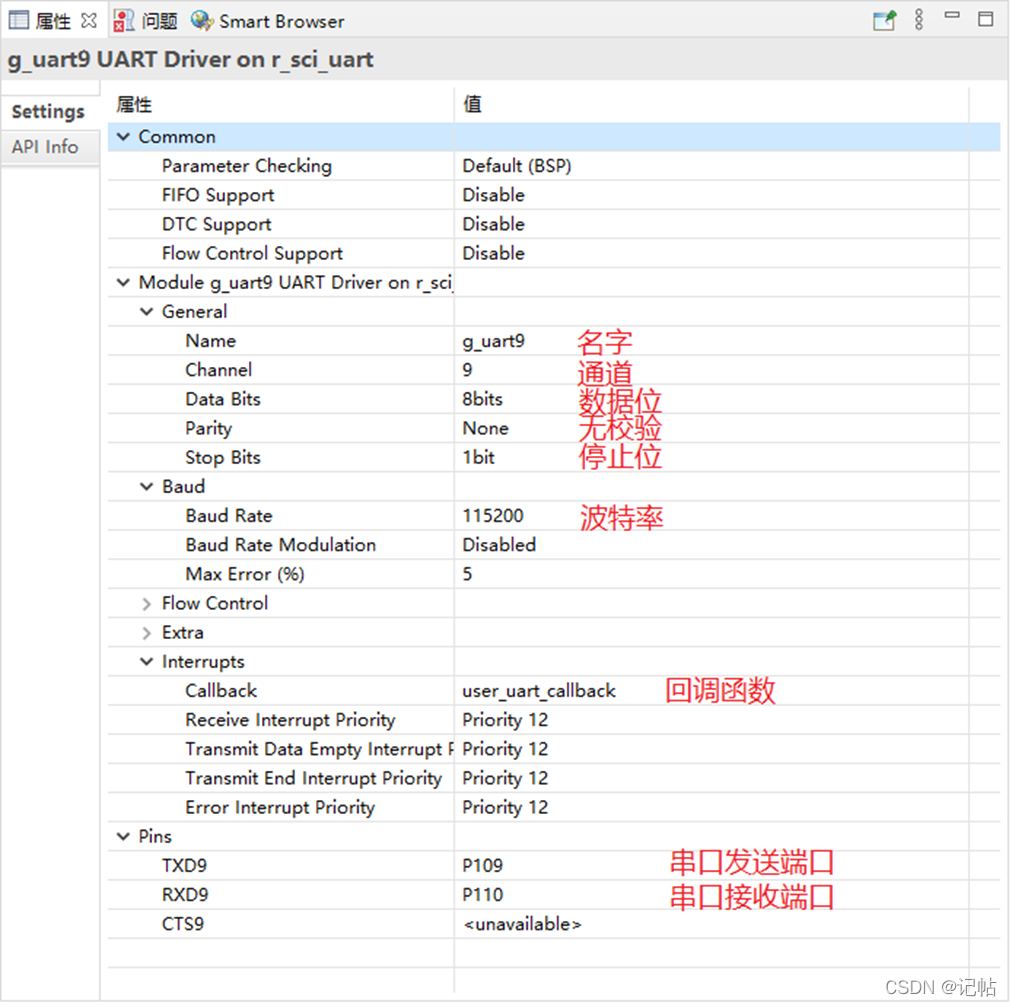
回调函数user_uart_callback ()
发送完毕可以用UART_EVENT_TX_COMPLETE进行判断。 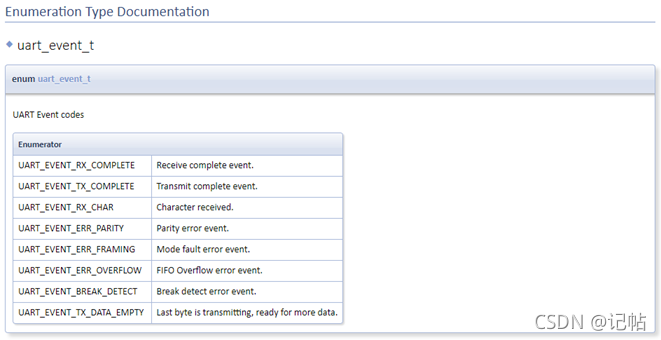
volatile bool uart_send_complete_flag = false;
void user_uart_callback (uart_callback_args_t * p_args)
{
if(p_args->event == UART_EVENT_TX_COMPLETE)
{
uart_send_complete_flag = true;
}
}
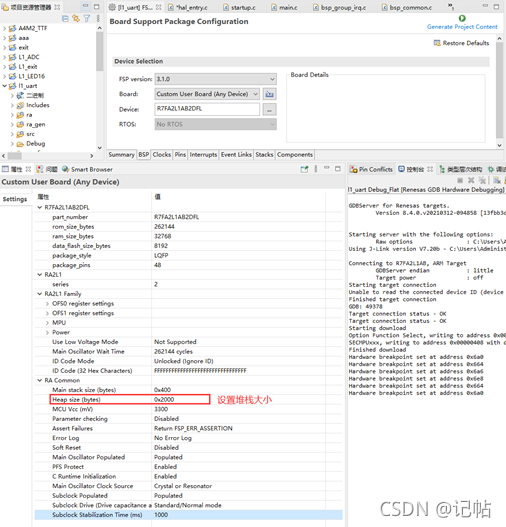
设置e2studio堆栈
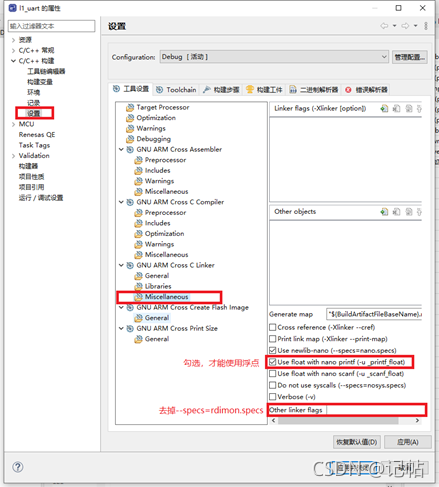
e2studio的重定向printf设置
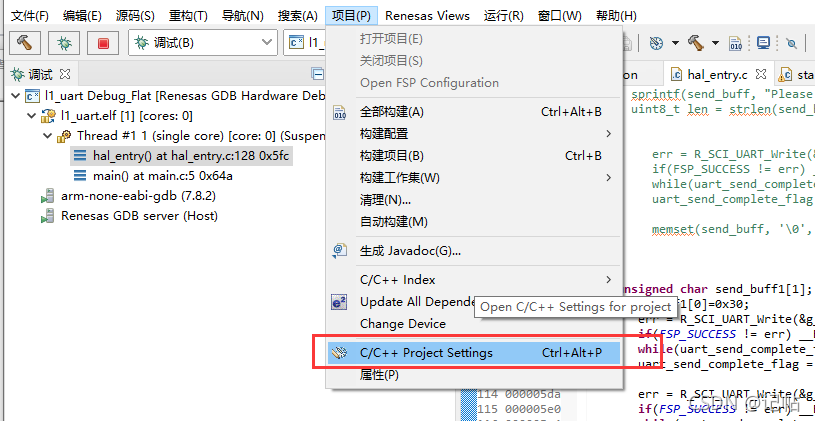 C++ 构建->设置->GNU ARM Cross C Linker->Miscellaneous去掉Other linker flags中的 “--specs=rdimon.specs”
C++ 构建->设置->GNU ARM Cross C Linker->Miscellaneous去掉Other linker flags中的 “--specs=rdimon.specs”
printf输出重定向到串口
打印最常用的方法是printf,所以要解决的问题是将printf的输出重定向到串口,然后通过串口将数据发送出去。 注意一定要加上头文件#include
#ifdef __GNUC__ //串口重定向
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
err = R_SCI_UART_Write(&g_uart9_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return ch;
}
int _write(int fd,char *pBuffer,int size)
{
for(int i=0;ireturn size;
}
ADC配置
点击Stacks->New Stack->Driver->Analog -> ADC Driver on r_adc。

ADC属性配置


R_ADC_Open()函数原型
 故可以用R_ADC_Open() 函数进行配置,开启和初始化ADC模式。
故可以用R_ADC_Open() 函数进行配置,开启和初始化ADC模式。
/* Initializes the module. */
err = R_ADC_Open(&g_adc0_ctrl, &g_adc0_cfg);
/* Handle any errors. This function should be defined by the user. */
assert(FSP_SUCCESS == err);
R_ADC_ScanCfg()函数原型
 配置ADC扫描参数,赋能ADC通道。在此函数中设置通道特定设置。
配置ADC扫描参数,赋能ADC通道。在此函数中设置通道特定设置。
/* Enable channels. */
err = R_ADC_ScanCfg(&g_adc0_ctrl, &g_adc0_channel_cfg);
assert(FSP_SUCCESS == err);
R_ADC_ScanStart()函数原型
 启动扫描,若设置为单次扫描,没扫描完一次都需要重新开启。
启动扫描,若设置为单次扫描,没扫描完一次都需要重新开启。
/* Enable scan triggering from ELC events. */
(void) R_ADC_ScanStart(&g_adc0_ctrl);
回调函数adc_callback ()
每次扫描完之后都会进入回调函数中。
volatile bool scan_complete_flag = false;
void adc_callback (adc_callback_args_t * p_args)
{
//宏将告知编译器回调函数不使用参数 p_args,从而避免编译器发出警告,
FSP_PARAMETER_NOT_USED(p_args);
scan_complete_flag = true;
}
故需要在扫描时候在主程序中等待其扫描完毕。
scan_complete_flag = false;
while (!scan_complete_flag)
{
/* Wait for callback to set flag. */
}
R_ADC_Read()函数原型
 读取单个通道的ADC值。
读取单个通道的ADC值。
err =R_ADC_Read(&g_adc0_ctrl, ADC_CHANNEL_0, &adc_data1);
assert(FSP_SUCCESS == err);
a1=(double)(adc_data1/4095.0)*3.3;
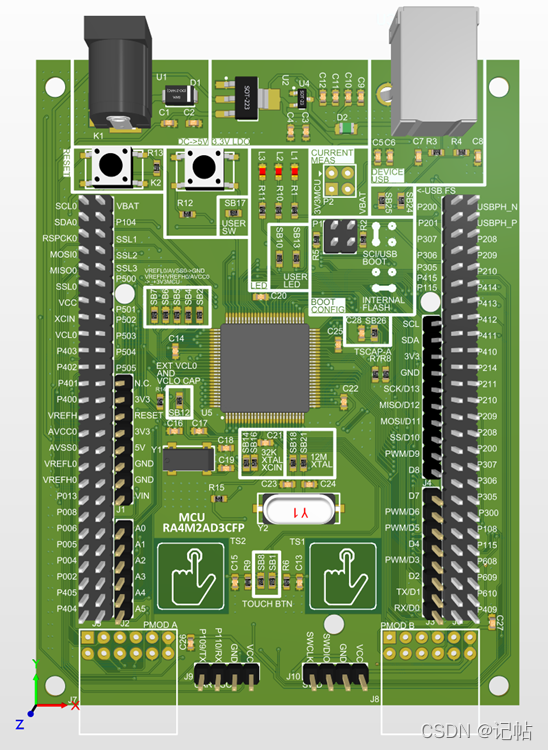
多通道设置
开发板有Arduino接口,接入多个AD进行采样。  以读取通道0(P000)、通道1 (P001)、通道3 (P003)为例子,通道配置如下。
以读取通道0(P000)、通道1 (P001)、通道3 (P003)为例子,通道配置如下。 
通道配置要注意通道数,配置错误可能会读取错误。

多通道代码
#include "hal_data.h"
#include return size;
}
volatile bool scan_complete_flag = false;
/* Callback function */
void adc_callback(adc_callback_args_t *p_args)
{
/* TODO: add your own code here */
//宏将告知编译器回调函数不使用参数 p_args,从而避免编译器发出警告,
FSP_PARAMETER_NOT_USED(p_args);
scan_complete_flag = true;
}
void hal_entry(void)
{
/* TODO: add your own code here */
err = R_SCI_UART_Open(&g_uart9_ctrl, &g_uart9_cfg);
assert(FSP_SUCCESS == err);
err = R_ADC_Open(&g_adc0_ctrl, &g_adc0_cfg);
assert(FSP_SUCCESS == err);
err = R_ADC_ScanCfg(&g_adc0_ctrl, &g_adc0_channel_cfg);
assert(FSP_SUCCESS == err);
printf("hello
");
uint16_t adc_data0=0;
uint16_t adc_data1=0;
uint16_t adc_data3=0;
double a0,a1,a3;
while(1)
{
/* Enable scan triggering from ELC events. */
(void) R_ADC_ScanStart(&g_adc0_ctrl);
scan_complete_flag = false;
while (!scan_complete_flag)
{
/* Wait for callback to set flag. */
}
err = R_ADC_Read(&g_adc0_ctrl, ADC_CHANNEL_0, &adc_data0);
assert(FSP_SUCCESS == err);
a0=(double)(adc_data0/4095.0)*3.3;
err = R_ADC_Read(&g_adc0_ctrl, ADC_CHANNEL_1, &adc_data1);
assert(FSP_SUCCESS == err);
a1=(double)(adc_data1/4095.0)*3.3;
err = R_ADC_Read(&g_adc0_ctrl, ADC_CHANNEL_3, &adc_data3);
assert(FSP_SUCCESS == err);
a3=(double)(adc_data3/4095.0)*3.3;
printf("%d,a0=%f
",adc_data0,a0);
printf("%d,a1=%f
",adc_data1,a1);
printf("%d,a3=%f
",adc_data3,a3);
R_BSP_SoftwareDelay (1000, BSP_DELAY_UNITS_MILLISECONDS);
}
#if BSP_TZ_SECURE_BUILD
/* Enter non-secure code */
R_BSP_NonSecureEnter();
#endif
}
审核编辑:汤梓红
-
单片机
+关注
关注
6032文章
44514浏览量
632938 -
adc
+关注
关注
98文章
6430浏览量
544073 -
瑞萨
+关注
关注
34文章
22290浏览量
86063
发布评论请先 登录
相关推荐
瑞萨e2studio(16)----基于DTC的多通道ADC采集
瑞萨e2studio(1)----瑞萨芯片之搭建FSP环境

瑞萨e2studio(9)----EXIT

瑞萨e2studio(12)----USRT通过定时器中断方式接收不定长数据

瑞萨e2studio----基于DTC的多通道ADC采集






 工商网监
工商网监
评论