 【先楫半导体HPM6750EVKMINI评估板试用体验】基准性能测试之二:coremark
【先楫半导体HPM6750EVKMINI评估板试用体验】基准性能测试之二:coremark
本文来源电子发烧友社区,作者:李先生, 帖子地址:https://bbs.elecfans.com/jishu_2284342_1_1.html
前言
 获取代码
获取代码
 添加代码
添加代码
 修改代码
修改代码
前言
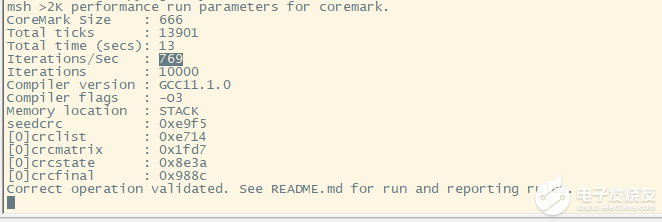
根据手册描述性能可达5.6 CoreMark / MHz。
我们就实际”跑个分”看看。
https://github.com/eembc/coremark
进入HPM6750EVKMINI/proj/led目录
Clone代码
git clonehttps://github.com/eembc/coremark
删除其他文件,只保留如下内容,并删除barebones下的.mak文件
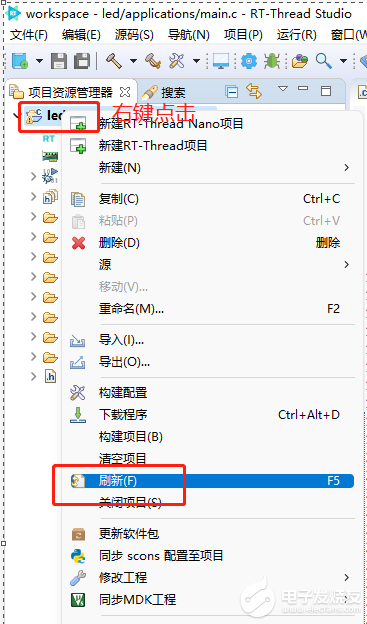
按照上一步将文件下载到工程目录下后,按照如下方式刷新
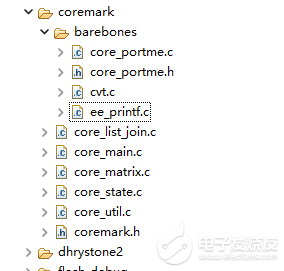
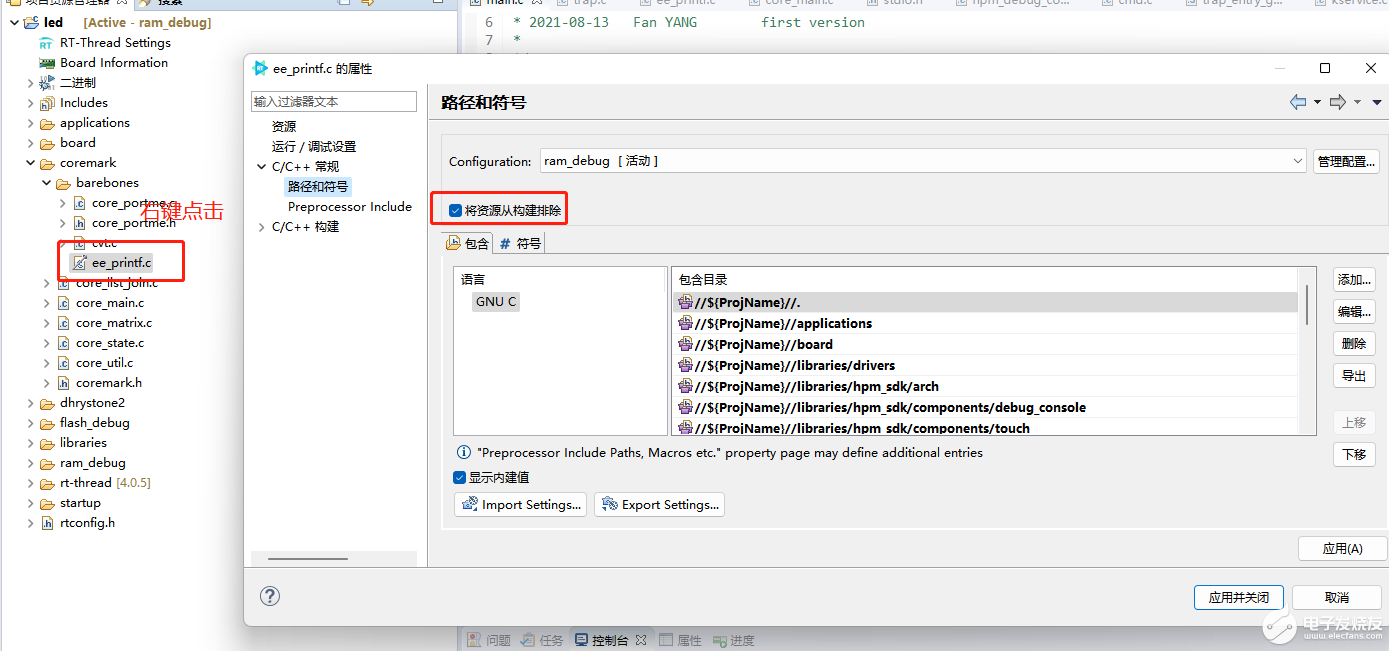
可以看到源码添加到了工程目录
按如下设置不编译ee_printf.c因为已经有打印函数rt_kprintf。
coremark.h中
#include"rtthread.h"
#include"core_portme.h"改为
#include"barebones/core_portme.h"
增加宏定义
#ifHAS_PRINTF
#defineee_printf printf
#endif
改为
//#ifHAS_PRINTF
#defineee_printfrt_kprintf
//#endif
core_portme.h中
#defineHAS_FLOAT1
改为
#defineHAS_FLOAT0
前面添加#include
#defineCOMPILER_FLAGS
FLAGS_STR/* "Please put compiler flags here (e.g. -o3)" */
#endif
按照实际修改比如
#defineCOMPILER_FLAGS
“-O3”
#endif
core_portme.c中
#include"coremark.h"改为
#include"../coremark.h"
实现接口
barebones_clock()
使用rt_tick_get()
所以前面要包含#include"rtthread.h"
CORETIMETYPE
barebones_clock()
{
//#error
// "You must implement a method to measure time in barebones_clock()! This function should return current time.n"
returnrt_tick_get();
}
#defineEE_TICKS_PER_SEC (CLOCKS_PER_SEC / TIMER_RES_DIVIDER)改为
#defineEE_TICKS_PER_SEC RT_TICK_PER_SECOND
因为已经初始化了环境所以注释掉portable_init的
//#error
core_main.c中
main改为core_main
ee_printf("Total time (secs): %dn", time_in_secs(total_time));改为
ee_printf("Total time (millisecond): %dn", time_in_secs(total_time*1000));
if(time_in_secs(total_time) > 0)
ee_printf("Iterations/Sec : %dn",
(int)((default_num_contexts * results[0].iterations*1000.0
/ time_in_secs(total_time*1000))));
main.c中
调用
intcore_main(intargc,char*argv[]);
core_main(0, 0);
由于定义了大数组
#if(MEM_METHOD == MEM_STACK)
ee_u8stack_memblock[TOTAL_DATA_SIZE * MULTITHREAD];
#endif
所以main的任务栈要修改大一些
Rtconfig.h中#defineRT_MAIN_THREAD_STACK_SIZE (2048*4)
main任务优先级也提高一点大于shell的优先级
#defineRT_MAIN_THREAD_PRIORITY 21
测试
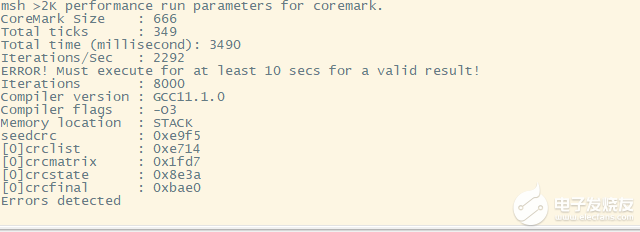
如果提示ERROR! Must execute for at least 10 secs for a valid result!
则将#defineITERATIONS 10000改大一点,测试时间要大于10秒。
配置为0则自动计算迭代次数。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
mcu
+关注
关注
146文章
17186浏览量
351773 -
先楫半导体
+关注
关注
10文章
216浏览量
2137
发布评论请先 登录
相关推荐
先楫HPM6E00技术日 | 百人研讨共话工业应用创新及发展趋势
现场交流氛围热烈。
活动开场,先楫半导体市场销售执行副总裁陈丹率先发言:“先楫从成立之初就一直致力于为中国市场提供具有创新价值的高
发表于 09-02 10:14
有奖提问!先楫半导体HPM6E00系列新品发布会!!
半导体HPM6E00新品预览”的活动,盛况空前。
自此之后一直收到大家的信息,问什么时候能够买到HPM6E00,这不,我们来了~
先楫
发表于 06-20 11:45
先楫半导体与您相约嵌入式盛会embedded world China Conference2024
》演讲。分享先楫半导体从HPM5300到HPM6200,再到即将发布的HPM6E00系列MCU,

先楫半导体 hpm_sdk v1.5.0 正式发布
先楫半导体 hpm_sdk v1.5.0 正式发布!功能升级更强大
版本更新概况
新支持的IDE
IAR Embedded Workbench for RISC-V (
发表于 04-08 11:14
引领极致视界——先楫高性能MCU HPM6800系列产品生态绽放,共链未来
2024年3月28日,上海-国产高性能微控制器厂商上海先楫半导体科技有限公司(先楫

基于先楫HPM5300 RISC-V内核MCU的HPM5361EVK开发板测评效果(二)
HPM5361EVK是基于先楫HPM5300系列高性能RISC-V内核MCU的一款开发板。


芯原2.5D GPU IP赋能先楫半导体HPM6800系列RISC-V MCU
芯原股份(股票代码:688521.SH)与先楫半导体(简称“先楫”)的合作,为高性能图形处理领域
【先楫HPM5361EVK开发板试用体验】(原创)5.手把手实战AI机械臂
与ChatGPT API结合,使机械臂能够基于视觉信息和AI指令进行动作。
今天先更新到这里...
谢谢!
接上四篇:
【先楫HPM5361EVK开发
发表于 02-06 10:28





 工商网监
工商网监
评论