 Lidar BA方案在后端部分的差异对比
Lidar BA方案在后端部分的差异对比
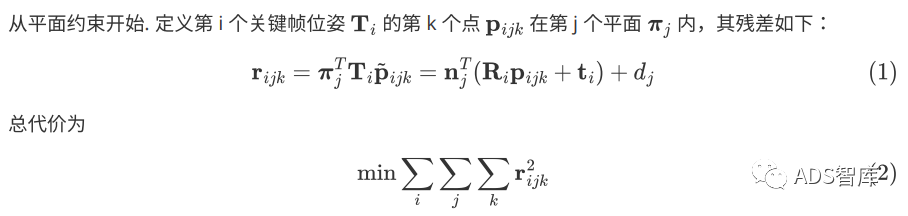
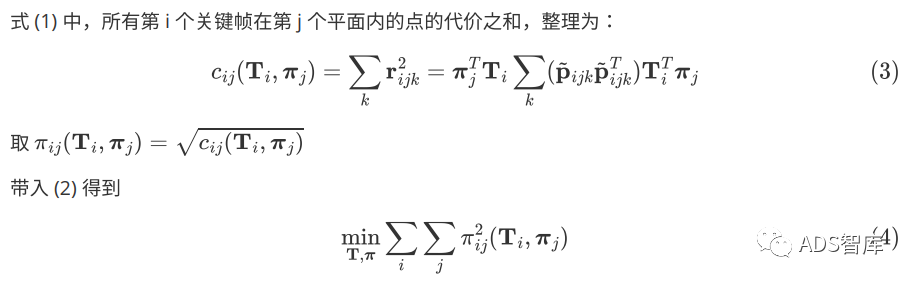
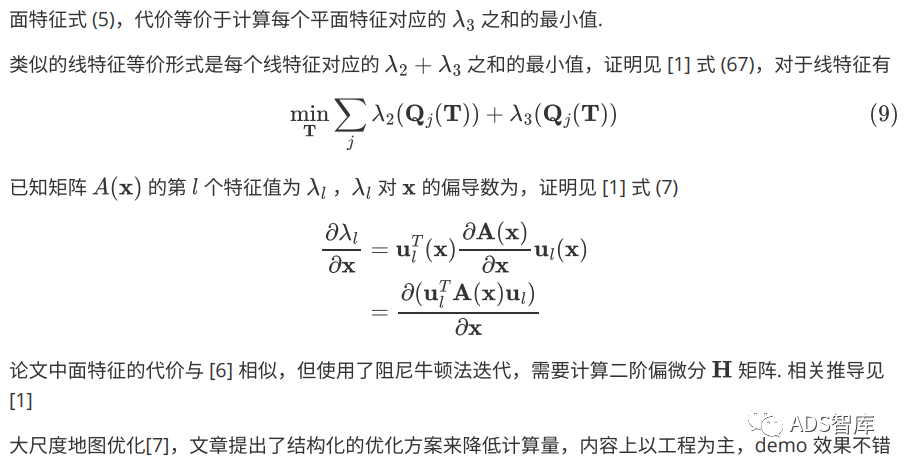
近几年点云 slam 领域有一类文章不满足于仅估计 pose graph。尝试类似视觉 slam 中的 ba 方法,其致力于同时估计 feature 和 pose。本文内容上仅对比了这些方案在后端部分的差异,但是数据关联可能是在该类方案中更为重要的问题。
PART. 01
π-LSAM(2021)[3]
PART. 02 Eigen Factors(2019)[6]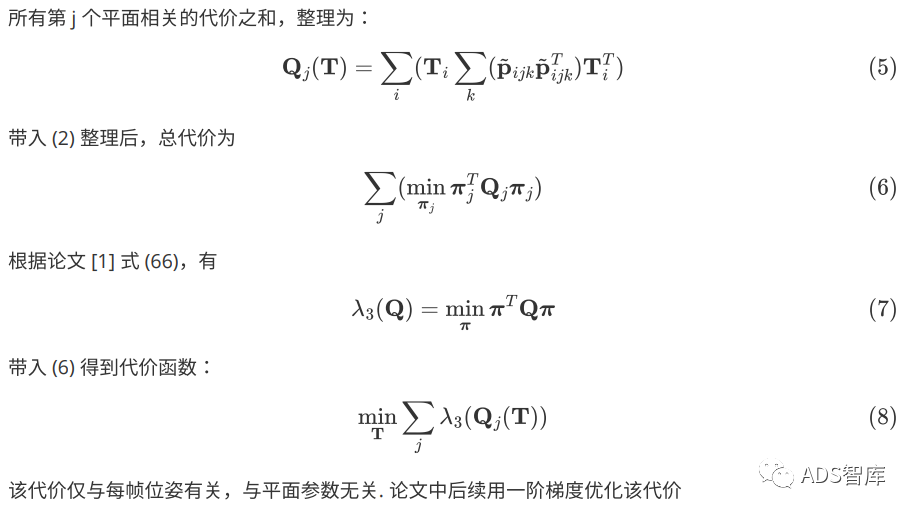
PART. 03 BALM(2020,2022)[1,2,7]
PART. 04
Plane Adjustment(2020,2021)[4,5]
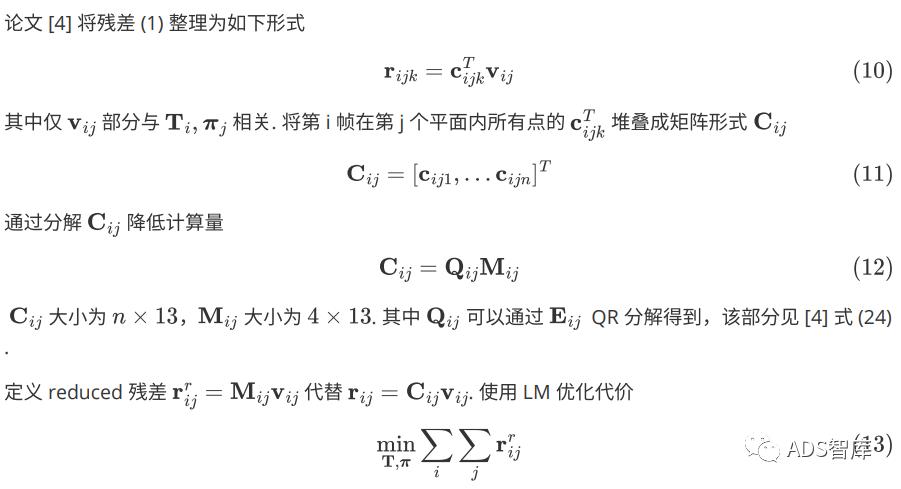
论文 [5] 考虑滑动窗口下的估计,其增加了边缘化部分的约束,未边缘化部分代价同 (13) 。
窗口外的约束的 pose 固定,但边缘化部分约束仍对 plane 参数求偏导。文中推导了每个 plane 对应边缘化部分的 reduced 残差,该残差对平面参数的导数可以通过增量计算 Hj 后 cholesky 分解得到。
该论文中对比了 BALM。因将墙体、门等平面两侧视为两个平面进行优化,减少了错误的数据关联,在某些数据集上优于 BALM。
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
SLAM
+关注
关注
23文章
426浏览量
31925
原文标题:Lidar BA 方案后端部分的差异
文章出处:【微信号:阿宝1990,微信公众号:阿宝1990】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
即插即用的自动驾驶LiDAR感知算法盒子 RS-Box
"高精度定位、障碍物识别、动态物体跟踪、车道线检查......"你的智能汽车准备好升级L3级别以上的LiDAR算法方案了吗?今年4月份,速腾聚创推出「普罗米修斯」计划。该计划承诺
发表于 12-15 14:20
LIDAR与RADAR在自动驾驶汽车中的比较
”。激光雷达在恶劣的天气条件(即雪,雨,雾)中有其局限性。虽然RADAR似乎没有受到天气条件的负面影响,但它不能像LIDAR那样准确地传递物体的大小和形状。此外,RADAR不是一个独立的解决方案。通常
发表于 10-30 14:30
Compare Designs就可以开启DSN设计差异对比的功能
,Design 2 就是需要进行对比的02.DSN文件。Schematic,Page可以设置对比的范围,其目的就是能够设置对部分原理图文件或者所有的原理图页面进行对比,方便工程师进行
发表于 07-06 15:02
实现“三重视野” – LiDAR技术实现安全驾驶
技术相对较新,并且在ADAS / AD市场中尚未采用通用方法。除了满足LiDAR的高性能计算和不断发展的设计需求外,赛灵思解决方案还非常适合解决成本和功耗 问题。Xilinx FPGA为多个传感器RX
发表于 08-20 19:22
LIDAR原型制作平台如何建立算法和自定义硬件解决方案的原型?
本文探讨ADI公司新推出且拥有广泛市场的LIDAR原型制作平台,以及它如何通过提供完整的硬件和软件解决方案,使得用户能够建立其算法和自定义硬件解决方案的原型,从而帮助客户缩短产品开发时间;详细介绍
发表于 06-17 09:08
什么是后端?
我想专门开这个帖子,供大家讨论和学习基本概念的。当然cadence和synopsys对一些概念的描述上的差异也可以拿来讨论。欢迎摘抄和转贴来讨论,你懂的和不懂的概念都可以拿来,我们大家一起揣摩它!想达到的效果:后来人通读这个帖子后就能了解后端的基本概念,虽然不是字典,但是
发表于 06-23 14:29
【Altium小课专题 第184篇】AD如何进行原理图差异对比?
在设计时,经常需要对两份原理图进行差异化对比来对比两份原理图的差异,这里准备了两份原理图,SMT32和SMT32-change,后面这份原理图是改变后的,以这两份原理图为例讲解如何进行
发表于 09-06 09:41
TIA电路在后端加滤波器的时候看到方波变形的情况怎么解决?
大家好,我在TIA电路的时候,在后端加滤波器的时候看到方波变形的情况。
multisim仿真下的情况
设计的滤波器是1k为中心频率,通带是500hz,阻带是10k,下图是用TINA做的原理图,仿真也是变形
是相位延时太高导致?
发表于 11-15 08:28
数字后端基本概念介绍
今天要介绍的数字后端基本概念是boundary cell,也被称为endcap Cell。Endcap是一种特殊的标准单元。在后端物理设计中,除了与,非,或等一些常见的标准单元外,还有一些特殊的物理单元(physical cell),它们通常没有逻辑电路,
固态LiDAR与机械LiDAR该如何选择
绝大部分LiDAR系统将在未来十年逐步转为固态方案,但是,仍将会有一些具有真正高性能和高价值的旋转式机械LiDAR传感器。
LeddarTech和ST合作开发基于LeddarEngine技术的LiDAR解决方案
应用的客户,是一家领先的汽车和工业应用解决方案供应商。该评估套件将演示技术概念,并为汽车的1、2级和工业系统集成商提供功能性LiDAR的开发能力,以开发基于LeddarEngine™技术的LiDAR解决
ChatGPT在后端设计中有什么应用?
本以为ChatGPT对于IC后端设计帮助应该不大,毕竟它非常依赖EDA工具,它对于EDA工具这种非常专业的、非常Custom的东西了解和训练的数据应该不多,所以可能帮不上什么忙。





 工商网监
工商网监
评论