 直流电机控制器:有刷与无刷
直流电机控制器:有刷与无刷
直流电机控制器是用于管理直流电机运行的特殊电子设备。所有直流电机都需要控制器吗?一点也不。让我们弄清楚哪些直流电机使用它以及用于什么目的。
在本文中,我们将研究两种类型的直流电机:有刷直流 (BDC) 和无刷直流 (BLDC) 电机。两种类型都使用控制器,可以启动和停止电机,调节其速度和扭矩,以及执行其他功能。然而,控制器对于 BLDC 电机更为重要,因为它是换向过程的一部分,对于所有由直流电供电的电机都至关重要。在这里,您将了解有关有刷和无刷直流电机及其控制系统之间的差异的更多信息。
BDC 和 BLDC 电机和控制器概述
要创建直流电机的旋转,您需要切换或换向施加到电机的电流,并改变电机绕线组件周围产生的磁场的极性。
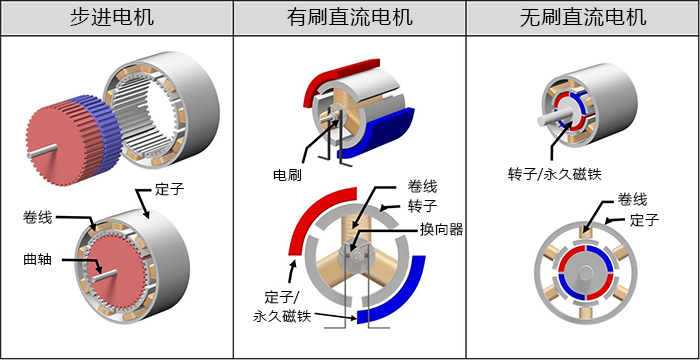
在BDC电机中,电流流过转子的绕组,而其定子可以有绕组(串联,并联,复合BDC电机)或永磁体(永磁BDC电机)。电机的运动取决于围绕这两个组件产生的磁场的相互作用。因此,它们的带相反电荷的场吸引并且类似的带电场相互排斥。
BDC电机的另一个关键元件是换向器,它切换电流的极性,并通过称为电刷的电触点将其施加到转子的绕组上。
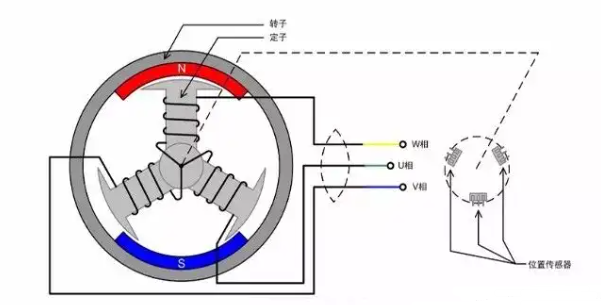
BLDC 电机还有一个转子和一个定子,但与有刷电机不同,电流流过定子的绕组。由永磁体制成的转子可以位于电机内部(内转子BLDC 电机)或外部(外转子BLDC 电机)。
BLDC 电机没有换向器或电刷等机械部件,因为这里的换向是由控制器驱动的电子过程。通过估计转子的位置,控制器决定何时切换电流以及为哪个定子绕组通电。因此,控制器对于无刷电机的运行至关重要。
除此之外,BDC 和 BLDC 电机控制器具有相同的功能;它们可以启动和制动电机,反转其旋转并控制其速度和扭矩。
有刷和无刷直流电机的应用特点
有刷和无刷直流电机都有自己的优点和缺点,定义了它们的应用领域。例如,BLDC 电机具有更小、更轻的结构,对其效率没有影响。这就是为什么它广泛用于不同尺寸的便携式电子产品和无线设备的原因。
与机械换向器相比,BLDC 电机控制器以更高的频率切换电流。这使电机能够保持高扭矩并在低速和高速下平稳运行。可靠性和低维护也是 BLDC 电机的强项之一。因此,其适用范围可能包括其在以下方面的使用:
电动车;
无人驾驶飞行器;
家用电子产品;
在某些应用中,BDC 电机已经让位于无刷电机。事实上,机械换向效率较低,通常会导致功率损耗。电流切换期间产生的火花会导致高水平的电子噪声。此外,刷子需要定期维护和/或更换。
尽管存在所有这些缺点,BDC电机在注重简单性和成本效益的低功耗系统和应用中仍然很受欢迎。它们可以在遥控玩具、简单的家用、工业和汽车电器中找到。
BDC 电机控制器的设计和实现比 BLDC 控制器更简单,因为没有复杂的电子元件和算法,在某些情况下使其成为更具吸引力的选择。因此,让我们看看构建这些设备中的每一个需要什么。
构建 BDC 电机控制器
在构建直流电机控制器之前,应指定技术要求并选择特定类型的设备。控制器的特性包括但不限于:
功率调节
为了调节速度或扭矩,BDC 控制器会增加或减少提供给电机的功率。线性稳压器允许控制器在电机的整个工作周期内施加恒定电压。
这种类型的调节通常不再用于现代控制器,因为它们主要依赖于具有脉宽调制(PWM)的开关稳压器。这种方法允许控制器通过脉冲供电来改变电压和电流水平。
控制类型
简单的系统使用直流电机控制器来调节电机的运行,而无需获得任何反馈。因此,开环控制器无法校正电机的参数。
相反,闭环直流电机控制器可以接收来自电机的反馈并根据需要调节其速度、旋转方向和其他参数。
直流电机控制器的其他特性包括电机的功率和工作电压。为确保电机及其控制器的可靠性,您应该了解电机正常运行所需的电源和电压水平。因此,您可以在低压和高压以及功率的电机控制器之间进行选择。
如上所述,大多数有刷电机使用PWM控制器。此类器件具有一个带有两个高边和两个低边开关的H桥电路。例如,当电机需要加速时,控制器会增加占空比(脉冲与脉冲周期的比值)。修改后的PWM信号到达栅极驱动器,这些驱动器打开晶体管的时间更长,并允许更多的电流进入。
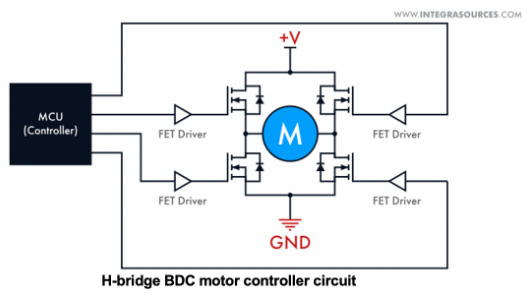
要沿一个方向旋转 BDC 电机,控制器打开对角线上的 H 桥开关。开关过程总是有一些延迟,因此在反转旋转时,所有四个晶体管都可能打开。为了防止电机出现电压和电流泄漏,您可以增加死区时间,使控制器保持所有晶体管闭合和依次打开。
要实现闭环控制电路,可以使用位置传感器。控制器将读取传感器发送的信号并做出相应的反应。在我们的一个项目中,我们创建了一个可编程直流电机控制器,既可以作为闭环系统,也可以作为开环系统工作。为了接收电机的反馈,我们增加了一个旋转编码器来监控电机的状况。
构建带有反馈的直流电机控制器时,您应该注意微控制器的功能。MCU 应:
覆盖传感器信号的频率范围;
具有必要的信号处理速率;
有足够的内存和闪存容量;
构建 BLDC 电机控制器
BLDC 电机控制器使用半 H 桥电路的晶体管切换电流。晶体管的数量取决于控制器激励的相数或绕组数。三相无刷直流电机控制器(最常见的配置之一)需要三个半H桥,即每相一个高边和一个低边开关。
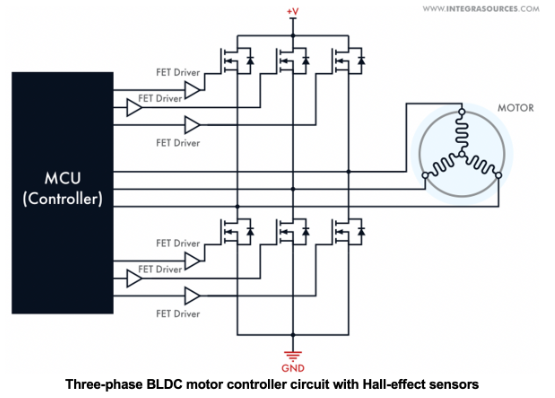
接收到MCU信号后,栅极驱动器打开晶体管并向定子绕组提供电流。要在相位之间切换,控制器需要知道转子的位置。有两种方法可以检测它:
安装位置传感器并使用其测量值;
感测定子绕组中随转子运动一起产生的反电动势(反电动势)。
第一种方法更简单,但传感器需要定期维护(例如,光学传感器容易产生灰尘)。此外,您还必须添加更多电线,这使电机的结构复杂化。第二种解决方案在硬件级别更简单,但可能需要复杂的算法开发。重要的是,只有当转子移动时,您才能感应回电动势。
根据我们的经验,当传感器与反电动势传感方法一起使用时,定位精度会提高。
检测到转子位置后,BLDC 电机控制器会切换电流,并将其作为梯形或正弦波形应用于不同的相位。
梯形换向的实现更简单,但是,它可能在低速时引起转矩脉动,并且只有在电机加快速度时才变得平稳。正弦直流无刷电机控制器主要依靠脉宽调制来产生正弦波。这种方法可在低速时提供平滑切换,但很难在高频下构建正弦波。
大多数无刷电机都有闭环控制器,这些控制器使用位置传感器和特殊算法来接收来自电机的反馈并做出响应。其中一种算法是比例-积分-微分 (PID) 算法,广泛用于 BLDC 和 BDC 电机控制器的反馈系统。
PID算法处理当前电机的参数,并将其与参考值进行比较。根据这些数据,它调整输出信号的频率,控制器相应地调节速度。
结论
直流电机在各个行业中的需求量很大。在某些应用中可互换,BDC 和 BLDC 电机仍然有其利基市场。例如,有刷电机的低成本和简单性使其成为日常使用的电子设备的合适选择。电子换向 BLDC 电机可在不同功率的应用中提供可靠性和高效的速度控制。
审核编辑:郭婷
-
传感器
+关注
关注
2552文章
51383浏览量
756241 -
adc
+关注
关注
99文章
6533浏览量
545617 -
BLDC
+关注
关注
208文章
804浏览量
97127
发布评论请先 登录
相关推荐
无刷直流电机的工作原理及应用
无刷直流电机是什么?它有什么特点?

BLDC电机与有刷直流电机的区别
无刷直流电机测量好坏的方法有哪些
无刷直流电机矢量控制技术详解
永磁无刷直流电机的控制方法
用STM32控制步进电机与无刷直流电机的区别是什么?
无刷直流电机驱动单元






 工商网监
工商网监
评论