 示波器测量之抖动的四个维度
示波器测量之抖动的四个维度
抖动是在进行示波器测量的时候常见的一种现象,也是工程师比较头痛的问题之一,也是尝尝讨论的问题。为什么这个话题千古不变值得讨论呢?是因为抖动是示波器测量的诸多功能中与“数学”较为相关的,从此也可以看出,学好数学的必要性。
抖动的知识有很多,但今天我们就针对抖动的四个维度进行简单的讲解,也让我们一点一点学透抖动。跟随小编先来了解一下抖动的四个维度到底是什么吧。
定义抖动的四个维度
和抖动相关的名词非常多:时钟抖动,数据抖动;周期抖动,TIE抖动,相位抖动,cycle-cycle抖动;峰峰值抖动(pk-pk jitter),有效值抖动(rms jitter);总体抖动(Tj),随机抖动(Rj),固有抖动(Dj);周期性抖动,DCD抖动,ISI抖动,数据相关性抖动;定时抖动,基于误码率的抖动;水平线以上的抖动和水平线以下的抖动……这些名词反应了定义抖动的不同维度。
那么,什么是抖动呢?
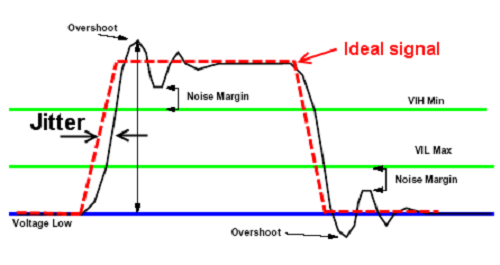
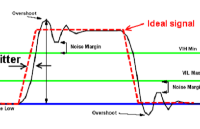
其实抖动的定义一直没有统一,这可能也是因为需要表达清楚这个概念的维度比较多的原因。目前引用得比较多的定义是:Jitter is defined as the short-term variations of a digital signal’s significant instants from their ideal positions in time.就是说抖动是信号在电平转换时,其边沿与理想位置之间的偏移量。如下图所示,红色的是表示理想信号,实际信号的边沿和红色信号边沿之间的偏差就是抖动。什么是“理想位置”,“理想位置”是怎么得到的?这是被问到后最不好回答的问题。
所以认为描述抖动离不开“四个维度”。仅仅是说“我想测量抖动”,这是不具体的表达。
建议的一种完整的表达方式是:我想测量100万样本(一定数量样本)下的时钟抖动(或数据抖动)的周期抖动(或TIE抖动,相位抖动,cycle-cycle抖动)的峰峰值抖动和有效值抖动(或Tj,Rj,Dj)。具体的测量方法上就是先测量被测信号的周期(或TIE,Cycle-cycle period)等参数,然后持续测量出100万个甚至更多样本,将这100万个样本下参数测量结果的最大值和最小值相减即为峰峰值抖动。但是10的12次方样本很难直接测量出来,因为需要消耗的时间太长,所以就改用数学模型预测的方法进行推导。
总结:
上面表达中涉及到示波器测量抖动定义的四个维度是:
(1)测量抖动的样本数/误码率。
(2)被测信号的类型。分为时钟抖动和数据抖动。
(3)关注的抖动参数的类型。主要有周期抖动,TIE抖动,cycle-cycle抖动。
(4)抖动测量结果的类型。主要有峰峰值抖动,有效值抖动,总体抖动(Tj),固有抖动(Dj),随机抖动(Rj)。
审核编辑:汤梓红。
-
示波器
+关注
关注
113文章
6333浏览量
186487 -
抖动
+关注
关注
1文章
69浏览量
18964
发布评论请先 登录
相关推荐
如何捕获超过四个测量值?
示波器测量之抖动的四个维度
关于示波器设置的抖动完美测量
从四个维度深度剖析激光雷达核心技术

实时示波器抖动测量执行步骤
数字示波器的抖动噪声基底是什么
示波器经常说“四个部分”是哪四个部分?

示波器测量之抖动的四个维度





 工商网监
工商网监
评论