 用于距离测量和物体检测的飞行时间系统
用于距离测量和物体检测的飞行时间系统
距离测量和物体检测在许多领域都发挥着重要作用,无论是在工厂自动化、机器人应用还是物流中。
特别是在安全方面,需要对特定距离的物体或人员进行检测和响应。例如,一旦工人进入其危险区域,机器人手臂可能需要立即停止。
飞行时间(ToF)为此变得越来越重要。使用ToF技术,光从调制源(例如激光)发射,然后由传感器或相机捕获从一个或多个物体反射的光束。因此,可以通过发射光和接收反射光之间的时间延迟∆来确定距离。时间延迟与相机与物体之间距离的两倍(往返)成正比。因此,距离可以估计为深度 d = (c × Δt)/2,其中 c 是光速。因此,ToF相机输出2D数据以及所需的深度信息。
ToF允许一次记录整个图像。无需逐行扫描或传感器与被观察物体之间的相对运动。ToF通常被归类为LIDAR(光检测和测距),但它是基于闪存LIDAR的方法,而不是扫描LIDAR。
使用ToF测量光脉冲的飞行时间基本上有两种不同的方法:基于电荷耦合器件(CCD)技术的脉冲操作和连续波(CW)操作。
光脉冲发射和接收之间的经过时间是在脉冲模式下测量的,而发射和接收调制光脉冲之间的相移是在CW模式下确定的。两种操作模式都有优点和缺点。脉冲模式对环境光更鲁棒,因此更适合户外应用,因为该技术通常依赖于在短积分窗口内以非常短的脉冲发射的高能光脉冲。而CW模式可能更容易实现,因为光源不必非常短,具有快速上升/下降沿。但是,如果精度要求变得更加严格,则需要更高频率的调制信号,并且可能难以实现。
现有的像素尺寸可实现高芯片分辨率,不仅可以进行距离测量,还可以实现物体和手势识别。要测量的距离范围从几厘米(《10厘米)到几米(《15米)。
不幸的是,并非所有物体都能被检测到相同的程度。物体的条件、反射率和速度会影响测量结果。
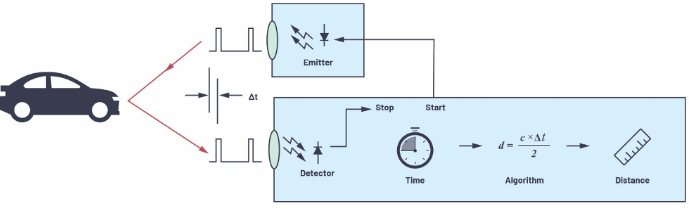
图1.飞行时间测量原理。
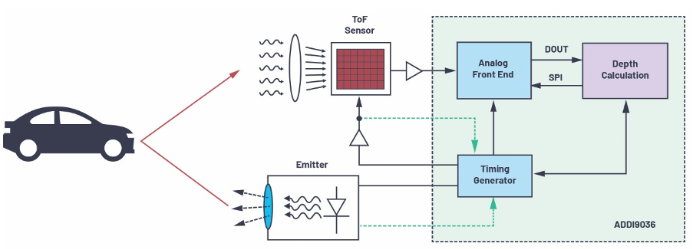
图2.ToF系统框图。
测量结果也可能被雾或强烈阳光等环境因素所伪造。环境光抑制有助于后者。
ADI公司(ADI)等半导体制造商提供完整的3D ToF系统,以支持3D ToF解决方案的快速实施。它们将数据处理、激光驱动器、电源管理和软件/固件集成到一个用于控制电子设备的单元中。其他组件包括发射调频光信号的发射器和记录反射信号的检测器。框图如图2所示。
具有集成深度计算的模拟前端(AFE)等组件对想要构建此类系统的任何人来说都有很大的帮助。其中,ADDI9036提供此功能。它是一款完整的 CCD ToF 信号处理器,具有集成半导体激光管驱动器、12 位 ADC 和高精度时钟发生器,可为 CCD 和激光器生成时序。ADDI9036负责处理来自VGA CCD传感器的原始图像数据,以产生深度/像素数据。
审核编辑:郭婷
-
传感器
+关注
关注
2551文章
51154浏览量
754040 -
机器人
+关注
关注
211文章
28458浏览量
207269 -
激光
+关注
关注
19文章
3207浏览量
64524
发布评论请先 登录
相关推荐
重磅新品 | 美芯晟发布全集成直接飞行时间(dToF)传感器MT3801

集成时间数字转换器简化了飞行时间测距应用的设计

艾迈斯欧司朗发布新一代单区直接飞行时间(dToF)传感器TMF8806
TDC7201适用于激光雷达、测距仪和ADAS中飞行时间应用的时间-数字转换器数据表

TDC7200 适用于激光雷达飞行时间、磁致伸缩和流量计应用的时间数字转换器数据表
Moku:Lab应用于双光频梳锁定实现高效精准测距

UWB利用飞行时间(ToF)从容应对百威啤酒厂仓库物流难题

贸泽开售适用于存在检测和系统激活应用的STMicroelectronics VL53L4ED飞行时间接近传感器
直接飞行时间(dToF) SiPM LiDAR 平台SECO-测距仪-GEVK数据手册

多区飞行时间(ToF)传感器的特点

飞行时间传感器:技术原理与多元应用






 工商网监
工商网监
评论