 机械手的直角坐标|多关节|圆柱坐标|极(球)坐标式运行方式简述
机械手的直角坐标|多关节|圆柱坐标|极(球)坐标式运行方式简述
机械手的手臂运动形式有所不同,一般情况下机械手可以分为:直角坐标式、多关节式、圆柱坐标式、极(球)坐标式四种形式。
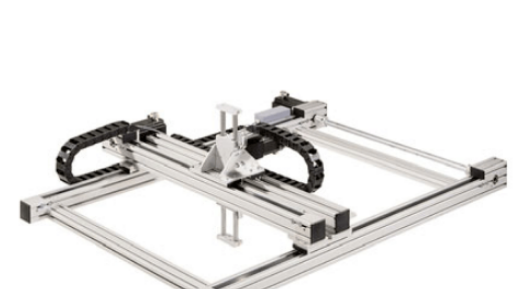
1.直角坐标式就是机械手在直角坐标系的三个坐标轴方向作直线移动,即机械手的前后移动、上下升降、左右移动。直角坐标机器人可达到很高的位置精度(μm级)。针对不同的应用场合,对直角坐标机器人有不同的设计要求,比如根据对精度、速度的要求选择不同的传动方式,根据特定的工艺要求为末端工作头选择不同的夹持设备(夹具、爪手、安装架等),以及对于示教编程,坐标定位、视觉识别等工作模式的设计选择等,从而使之能满足于不同领域、不同工况的应用要求。
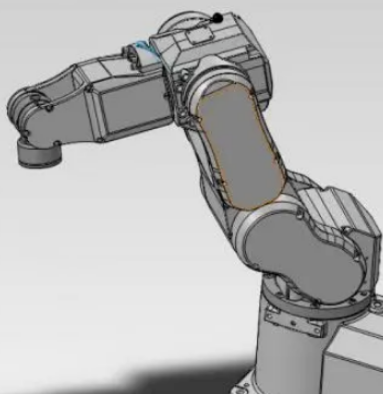
2.多关节式一般就是手臂会分为大臂和小臂两段,大小臂之间由肘关节连接,而大臂与立柱之间又连接成肩关节,再加上手腕与小臂之间的腕关节。但编程和操控必须由供应商通过专业培训才能完成,而且特殊软件需要收费。维护和维修完全受制于人,由于品牌互相不兼容,硬件故障必须由供应商或厂家直接提供,非市场通用产品,费用高昂。
3.圆柱坐标式这种就是机械手作前后伸缩、上下升降和在水平面内摆的动作。这种机器人构造比较简单,精度还可以,常用于搬运作业。其工作空间是一个圆柱状的空间。

4.极(球)坐标式就是机械手作前后伸缩、上下俯仰和左右摆动的动作。这种机器人结构简单、成本较低,但精度不很高。主要应用于搬运作业。其工作空间是一个类球形的空间。

CRT专业提供工业自动化运动控制技术及解决方案!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机械手
+关注
关注
7文章
335浏览量
29656
发布评论请先 登录
相关推荐
三坐标测量机的工作原理 三坐标测量机在质量控制中的应用
在现代工业生产中,产品质量的控制至关重要。三坐标测量机作为一种精密测量工具,能够提供精确的几何尺寸数据,对于确保产品质量和提高生产效率起着关键作用。 一、三坐标测量机的工作原理 三坐标测量机是一种
三坐标测量机应用领域 三坐标测量机与激光测量的区别
能够提供精确的测量数据,用于飞机和航天器部件的检测。 机械加工行业 机械加工行业需要对加工后的零件进行尺寸和形状的检测,三坐标测量机能够提供快速、准确的测量结果。 模具制造 模具制造过程中,三
三坐标测量机使用技巧 三坐标测量机精度影响因素
三坐标测量机的使用技巧及精度影响因素是确保测量结果准确性和可靠性的关键。 三坐标测量机的使用技巧 开机预热 : 在使用三坐标测量机之前,需要先开机预热,预热时间一般为30分钟左右,以确保机器达到稳定
直角坐标机器人在精密制造中可以执行哪些任务?
直角坐标机器人基于X、Y、Z轴精确控制,用于物料搬运、装配、焊接、喷漆、检测、包装等制造业任务,以其结构简单、高承载和精确控制成为自动化工具,飞创提供高速高精度直线电机模组解决方案。

机械手 OEM 的应用
工具,帮助学生更好地理解和掌握机械原理、自动化技术等知识。学生可以通过编程和操作机械手,提高自己的动手能力和创新思维能力。
机械手 OEM 的产品介绍 :
按结构类型划分 :
直角坐标
发表于 09-18 10:31
pcb设计中如何设置坐标原点
在PCB设计中,坐标原点是一个非常重要的概念,它决定了PCB布局的起始位置和方向。 一、坐标原点的定义 坐标原点的概念 在PCB设计中,坐标原点是一个参考点,用于确定PCB布局的起始位
蔡司三坐标SPECTRUM与CAPTUM三坐标介绍
蔡司,光学与测量领域的璀璨星辰,其旗下的三坐标SPECTRUM与CAPTUM三坐标测量机(CMM)系列,如同双子星般熠熠生辉,各自在测量技术的舞台上展现出独特的风采。蔡司代理昆山友硕的工程师们,为
桥式三坐标测量机和影像测量三坐标介绍
桥式三坐标测量机和影像测量三坐标在多个方面存在显著的差异。以下是它们之间的主要区别:一、测量维度:1.桥式三坐标测量机:主要测量三维

三坐标测量需要哪些基础知识?
几何学基础:了解基本的几何形状和尺寸,包括点、线、面、圆、球体等。2.测量学基础:熟悉测量的基本概念,如长度、角度、平面度、圆度、圆柱度等。3.机械制图:能够阅读和

蔡司三坐标使用的注意事项
蔡司三坐标测量机是一种高精度测量设备。正确使用蔡司三坐标测量机可延长三坐标测量机的使用寿命。测量工件时获得更精确的结果。也可以养成良好的工作习惯。

三坐标测量机发展现状以及三坐标国产化的意义
随着中国制造业不断发展壮大,三坐标测量机作为一个关键的检测设备,其发展现状备受关注。通过国内企业的不断努力和政府的支持,中国三坐标测量机市场蓬勃发展。同时,国产化的推动也为中国制造业带来了更大的机遇和发展空间。相信随着时间的推移,中国国内的三

蔡司三坐标测量仪的维护保养服务选项
蔡司三坐标测量仪灵活多样的增值服务选项01、控制柜固件版本更新服务固件版本更新将赋能三坐标测量机稳定且高效的运行。同时它还作为软件维护合同和扩展软件功能的基础,支持无缝链接使用当前最新和未来更新
labview鼠标坐标怎么获取
。 连接鼠标坐标节点的左侧"有关信息"输出端口到数字显示面板的输入端口。 运行程序,在Front Panel上单击鼠标,即可看到数字显示面板上显示出鼠标点





 工商网监
工商网监
评论