 DD马达与伺服电机的区别
DD马达与伺服电机的区别

DD是direct driver的简称,包括力矩电机和直线电机,后面加上电机就是称为DD直驱电机也叫直接驱动马达。
由于其输出力矩大,因此有些公司将该产品直接称为力矩伺服。与传统的电机不同,该产品的大力矩使其可以直接与运动装置连接,从而省去了诸如减速器,齿轮箱,皮带轮等连接机构,因此才会称其为直驱动电机。
由于一般该型电机都配置了高解析度的编码器,因此使该产品可以达到比普通伺服高一个等级的精度。又由于采用直接连接方式,减少了由于机械结构产生的定位误差,使得工艺精度得以保证。另对于部分凸轮轴控制方式,一方面减少了由于机械结构摩擦而产生尺寸方面的误差,另一方面也对安装,使用时的噪音等方面降低了很多。
DD马达与伺服电机的区别:
DD马达本身输出力矩大故称为力矩电机,与普通伺服电机不同,DD马达一体化结构,负载可直接安装在DD马达的安装面上,由电机到工位盘之间没有精度损失,增加了设计的精度,没有减速机的机械结构,就不会像普通电机那样的能量损失,用直接驱动方式使得通过程序改变工位变得很容易,使用时的噪音方面也降低了很多,配置高解析度的编码器,使DD马达可以达到秒级的精度,行业中也称为直接驱动电机。
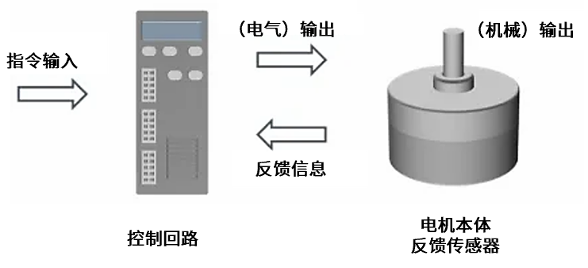
普通伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其原理是当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
力矩电机/DD马达,是以扭矩为控制方向的电机,采用的是开环控制的方式,其主要特点是:具有软的机械特性,可以堵转。当负载转矩增大时能自动降低转速,同时加大输出转矩当负载转矩为- -定值时改变电机端电压便可调速。
而普通伺服电机可以以扭矩、位置、速度等三种模式为控制方向的电机,可以采用闭环控制方式,控制精度较高;其主要特点是:当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降,转动惯量小,可用于定位。
审核编辑 :李倩
-
电动机
+关注
关注
75文章
4211浏览量
101810 -
伺服电机
+关注
关注
88文章
2202浏览量
61593 -
马达
+关注
关注
1文章
880浏览量
65420
原文标题:数控五轴机床转台配置DD马达与伺服电机的区别
文章出处:【微信号:旺材伺服与运动控制,微信公众号:旺材伺服与运动控制】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
伺服电机编码器14根线、5根线、4根线的区别
伺服电机的控制方式简述

派克Parker防爆伺服电机与普通伺服电机的区别


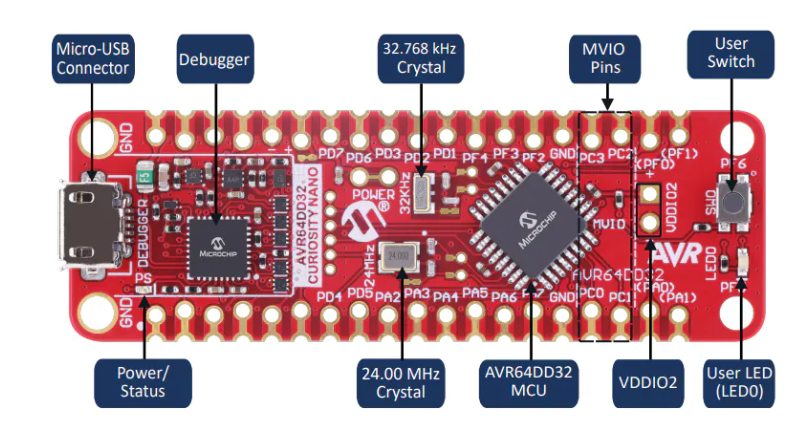
探索AVR64DD32 Curiosity Nano:一款强大的AVR DD系列评估平台
舵机与伺服电机的区别是什么?
伺服电机的三种制动方式有什么区别?

MT6835高速磁性编码优化伺服电机动态响应性能
伺服电机中的回原点方式

激光干涉仪:解锁协作机器人DD马达的精度密码

PLC与伺服控制有什么区别
步进电机和伺服电机的区别是什么?
激光干涉仪:解锁协作机器人DD马达的精度密码




评论