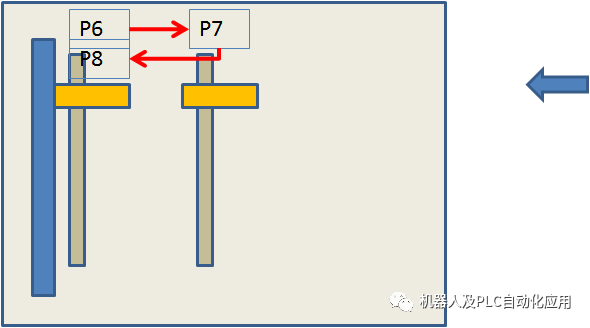
 通过接触位置确定后续坐标位置
通过接触位置确定后续坐标位置
LIN SUCHEN VB=350[mm/s] RobWzg=1Base=26 Fern=M28 Vred=10% Nah=M29 P
大众标注特有的轨迹搜索程序
5: Tech_ BaseverschiebungSuchlauf Base 31 setzen - - - xyz-MaxWeg:- Nahsensor=M29 EIN
当M29被触发后当前位置被报存为BASE31,从而后续使用BASE31的轨迹点的轨迹点实现偏移.
接触工件位置M29
LIN VB=700[mm/s] VE=0% ACC=100% RobWzg=20 Base=31 SPSTrig=5[1/100s]P
返回测量位置
LIN VB=400[mm/s] VE=0% ACC=100% RobWzg=31 Base=31 SPSTrig=5[1/100s]P
抓件位置
Tech_Baseverschiebung Suchlauf Base 31 setzen- - - xyz-MaxWeg:- Nahsensor=M29 EIN
VW_USER (#USR_ADV,105,11,0,0,0,0,29,TRUE)
------------------ADC------------------------
CASE 105 ;上级组0, 下级组5 提前执行
Sensor fuer Dehnfuge 传感器的伸缩缝
IF(PAR7==TRUE)THEN
SWITCH PAR1
CASE 1当P1设置为1时当前位置的BASE坐标村到BASE31里(这里我们不使用).
CONTINUE
Base_Data[31] = BASE_DATA[VW_MPARA_ACT.BASE_NO]
.................
CASE 11
CONTINUE
WHILE ($CYCFLAG[PAR6]==TRUE)M(P6)
MLD(22,#QuitMsg) ;搜索运行接近传感器故障
ENDWHILE
;ENDFOLD
-----------------------MAIN--------------
CASE 105 ; 上级组0,下级组5 在轨迹当前步 执行
设置搜索运行基数
IF(PAR7==TRUE)THEN
SWITCH PAR1
CASE 1;只在于执行里执行
CASE 11; ---------成功搜索后设置基数
CONTINUE
WHILE(VW_MPARA_ACT.BASE_NO<1) 当使用的BASE号不能是0
MLD(18,#QuitMsg); 如果是0提示BASE值不正确
ENDWHILE
IF $FLAG[Fehler_Suchlauf]==TRUE THEN F533开启搜索指令
MLD(16,#QuitMsg);没有提示信息
ENDIF
--------如果坐标号是31的话---------------
IF(BASE_TYPE[VW_MPARA_ACT.BASE_NO]==#BASE)THEN当前BASE的类型是#BASE
CONTINUE
$BASE=$NULLFRAME-------坐标值零----------
$BASE=$pos_act 当前坐标保存位BASE坐标值
BASE_DATA[31]=$BASE 保存在BASE31里
IF NOT $EXT THEN 不是外部自动会有提示信息,,并停止程序
MeldNr(4) ;这样的,新基坐标已定
HALT
ENDIF
ENDIF
审核编辑 :李倩
-
传感器
+关注
关注
2550文章
51070浏览量
753303 -
坐标
+关注
关注
1文章
17浏览量
21387
原文标题:通过接触位置确定后续坐标位置
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
凸轮轴位置传感器的工作原理 如何测试凸轮轴位置传感器
位置传感器的类型和用途是什么
HarmonyOS NEXT应用元服务开发控件位置调整场景与重新设置新焦点位置的场景
pcb设计中如何设置坐标原点
光路元件的位置和方向
cmm三坐标测量仪精准掌握形状与位置公差
鸿蒙原生应用元服务开发-位置服务开发概述
labview屏幕找图,返回找到的位置XY坐标
脉冲编码器位置未确定如何解除,脉冲编码器位置怎么调
编码器零点位置怎么看 | 编码器零位怎样确定

苹果VisionPro头显无法通过“查找”确定位置
什么是位置传感器?它有哪些分类?
三坐标测量设备精确检测模具尺寸形状和位置






 工商网监
工商网监
评论