 基于以太网的板载域控制器研究
基于以太网的板载域控制器研究

汽车“新四化”即电动化、智能化、网联化、共享化的趋势,给汽车的电气化/电子化架构带来了新的挑战。车辆的拓扑结构已从分布式ECU开发转变为集中式域控制器和中央计算机;整车功能已从分散式软件开发转变为统一软件架构的聚合开发。本文研究了基于以太网的板载域控制器,阐述了统一架构平台的研究方法。基于SOA模型,讨论了基于SOME/IP的服务定义、软件架构、硬件拓扑和通信层参数
介绍
随着汽车“新四化”的发展,电动化、智能化、智能化、网络连接和共享,基于车载以太网的骨干网和子网设计逐渐增加。整车网络拓扑结构从CAN总线变为以太网。
本文研究一种基于以太网的车载网关控制器。首先,通过Vector公司的架构设计工具PREEvision,构建车载以太网的设计需求,包括SOME/IP的业务定义、软件架构的定义、硬件拓扑的定义和通信层参数的定义;通过协议栈设计工具Davinci,最终构建符合AUTOSAR架构的域控制器,通过Vector公司的总线仿真软件Canoe,对设计内容进行仿真验证。
以太网网关域控制器软件架构
服务接口定义:根据车辆架构的功能,将包含在网关控制器中的服务在PREEvision工具中设计。该服务包括服务提供者和服务消费者。服务提供者的主要工作是提供服务,服务消费者向服务提供者发送服务请求以获取服务功能,网关控制器车辆应用信息以服务接口的形式定义,主要包括方法、事件和属性。在PREEvision工具中,根据服务内容建立服务接口,定义其方法和事件。对于方法,需要定义其输入和输出参数。在这个设计过程中,服务的接口由AUTOSAR软件架构实现,服务提供者和消费者由AUTOSAR软件组件(SWC)实现,稍后分配给ECU组件。 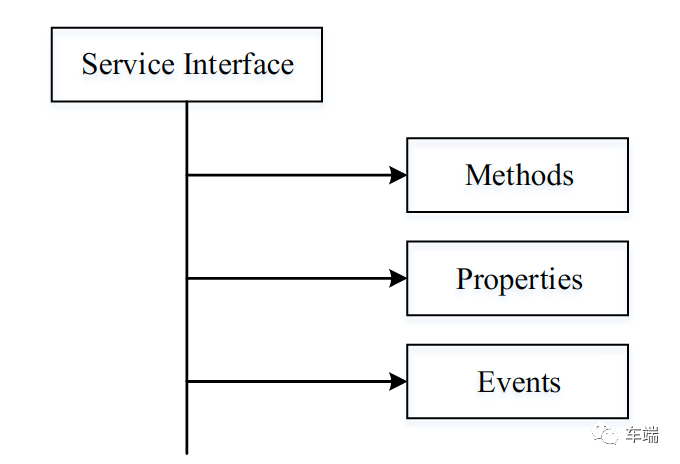
图1.服务接口。
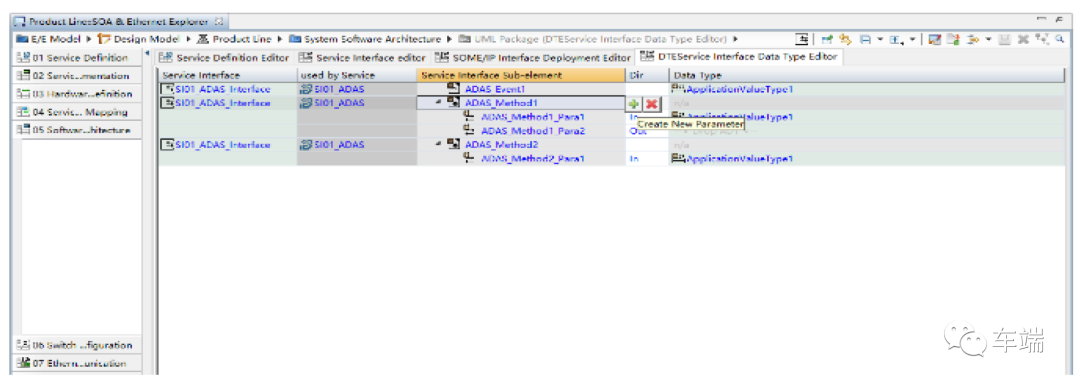
图2.定义服务接口。
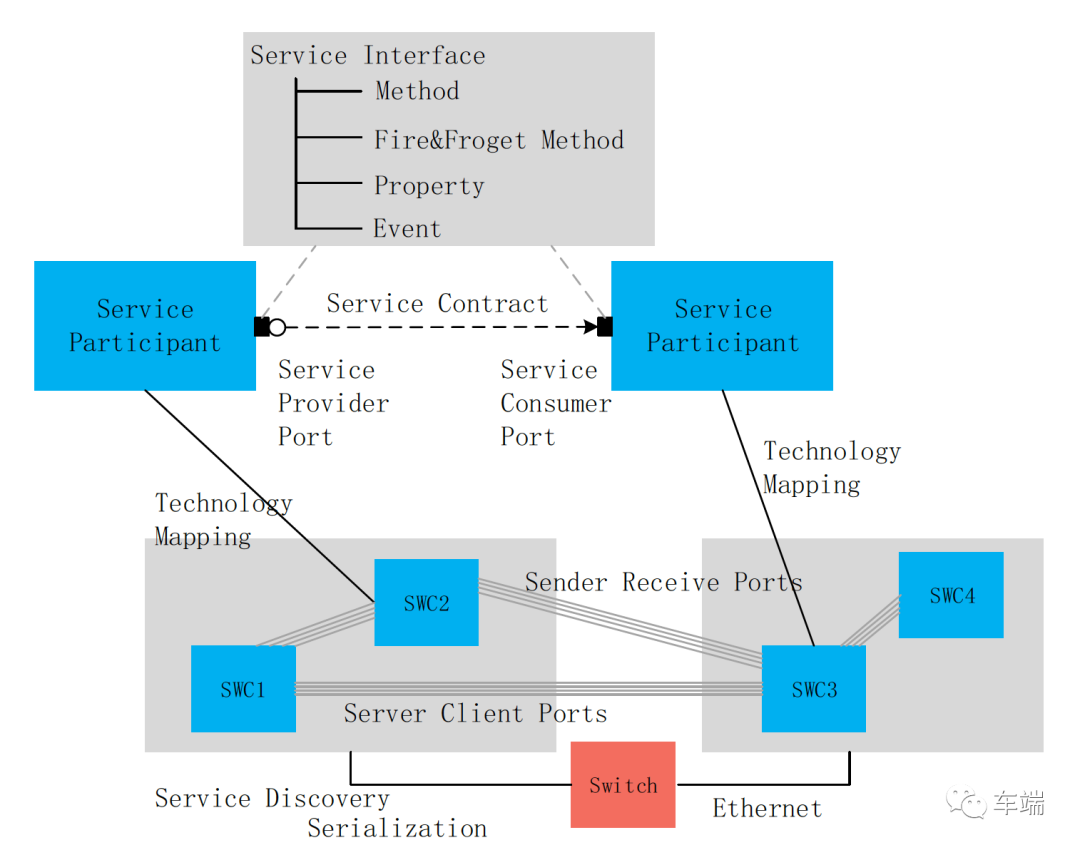
图3.Autosar设计过程。
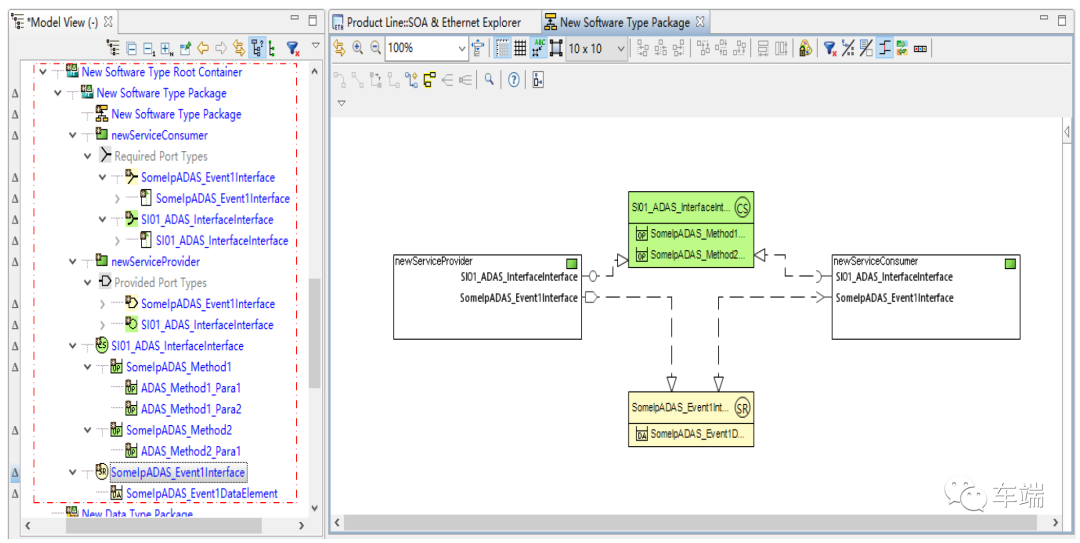
图4.SWC 建模
SWCS 通过端口传输信息,服务接口封装到端口中。端口可分为“发送/接收数据”和“发送/接收服务”。SWC位于RTE的顶部,通过RTE调用底层协议接口来完成数据传输。
在SWC中,服务提供方确认服务可用性,服务消费方确认服务请求状态;基本软件模式管理器(BSWM)用于管理服务模型和转发服务发现的可用性和请求状态到软件组件或者管理服务发现模块。
服务发现模块确认服务可用性和请求状态,并发送相应的 SD 消息(如 SD 提供服务消息),并根据接收到的SD消息转换为基本软件模式管理器模式。服务发现通过套接字适配器配置发送和接收的事件和方法。
套接字适配器可以灵活分配PDU,实现多客户端接收,即一个PDU在多个套接字连接上动态发送,同时服务发现与SOME/IP模块通过套接字适配器完成信息交互。
在工具中,建立相应的SWC和相应的接口。服务软件组件设计完成后,网关控制器可以通过服务发现将服务的可用性和位置发布到其他ECU。服务消息类型包括search service, provide / stop service, stop / subscribe event group and subscribe event group feedback。
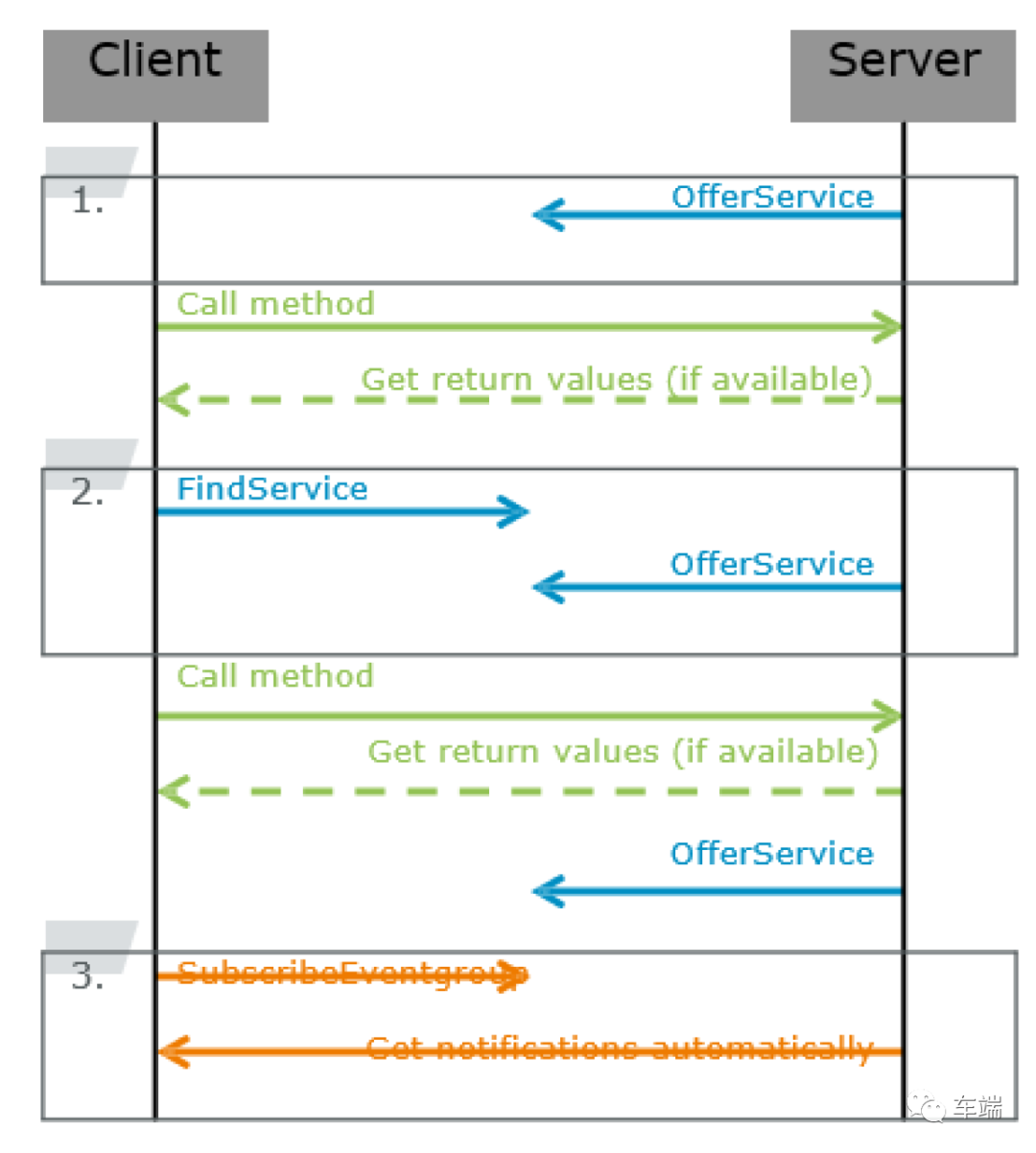
图5.服务交互
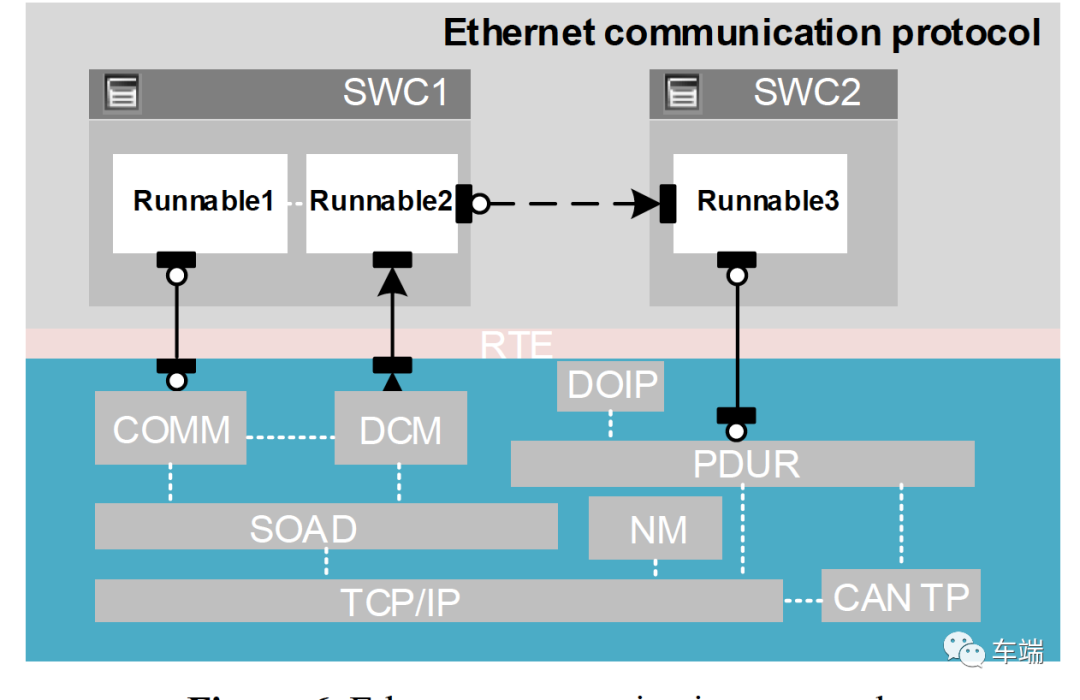
图6.以太网通信协议。
软件架构:车载网关控制器的底层通信协议如图6所示,其应用层的SWC组件在实时操作环境(RTE)上运行。
在网关控制器的底层通信协议中,需要定义以太网报文的路由方式,并将服务的传输实例化为特定的信号和消息。通过达芬奇工具,以太网底部域控制器的通信层设计配置如图 7 所示。
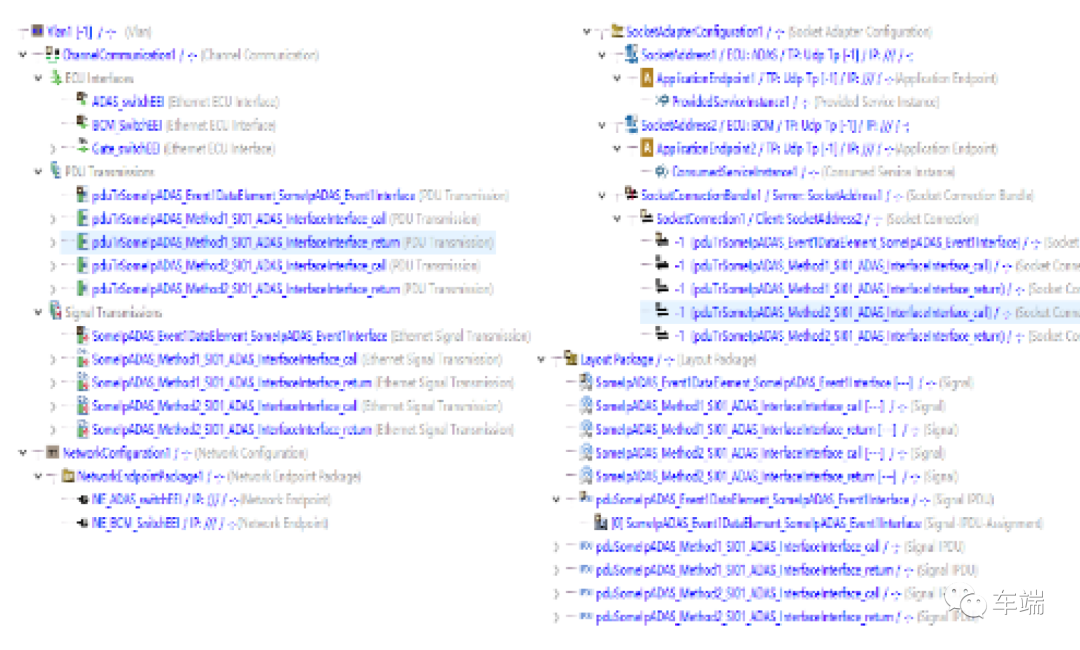
图7.传输设计
以太网网关域控制器的硬件实现
该方案配备双MCU,其中飞思卡尔i.mx6q处理器用于复杂工况下算法的处理,恩智浦公司的S32K148处理器用于车辆信号路由;以太网网关包括CAN/CANFD和以太网通信模块,以太网通信模块电路由MAC控制和物理层PHY接口组成。以太网系统结构包括 5 通道 CAN(支持 4 通道 CAN FD)、1 路 Lin、4 路数字交换机采集、5 路 100base-t1、1 路 100base-tx 和 2 路电源输入。
在以太网总线传输过程中,传输电缆本身和总线通道上的所有负载的损耗或多或少,包括电路消耗、滤波电路、电路转换器、各元件的连接器等。信号频率对衰减也有很大影响。基于此考虑,设计方案采用8层高密度板,布局和布线严格设置在规则中,以优化信号完整性设计。
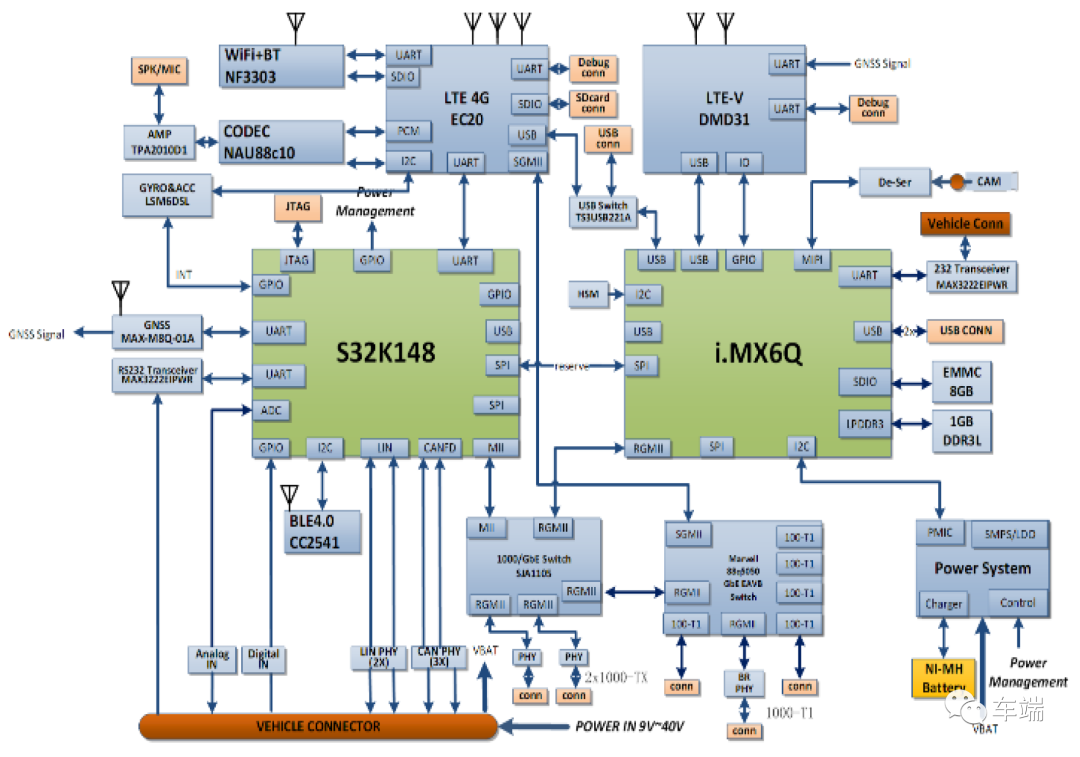
图8.硬件原理实现 
图9.硬件电路板设计
审核编辑:刘清
-
控制器
+关注
关注
114文章
17909浏览量
195725 -
以太网
+关注
关注
41文章
6279浏览量
181854 -
CAN总线
+关注
关注
146文章
2052浏览量
135587
原文标题:基于以太网的车载域控制器开发
文章出处:【微信号:智能汽车电子与软件,微信公众号:智能汽车电子与软件】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
车载网关测试:CAN/CANFD收到信号后,通过以太网转发给座舱域控制器,交联验证怎么做?

探索KSZ8841-PMQL:单端口以太网MAC控制器的卓越性能与应用
LAN9116:高效单芯片10/100非PCI以太网控制器的技术剖析
DP83816:10/100 Mb/s集成PCI以太网控制器的深度解析

探索Microchip LAN9215:16位非PCI 10/100以太网控制器的卓越性能
探索Microchip LAN9211:高性能以太网控制器的卓越之选
GL5450助力以太网记录解决方案

深度剖析ENC28J60:独立以太网控制器的设计与应用指南
KSZ8851SNL/SNLI:单端口以太网控制器的卓越之选
解析 LAN9215i:16 位非 PCI 10/100 以太网控制器的卓越之选
KSZ8851SNL/SNLI单端口以太网控制器:设计与应用全解析
基于Microchip LAN8650/1的10BASE-T1S以太网控制器技术解析

Microchip LAN9211-ABZJ 集成 10/100 以太网 PHY的以太网控制器




评论