 揭开xenomai双核系统下clock机制的面纱
揭开xenomai双核系统下clock机制的面纱
clock可以说是操作系统正常运行的发动机,整个操作系统的活动都受到它的激励。系统利用时钟中断维持系统时间、促使任务调度,以保证所有进程共享CPU资源;可以说,“时钟中断”是整个操作系统的脉搏。
那你是否好奇xenomai cobalt内核和Linux内核双内核共存的情况下,时间子系统是如何工作的?一个硬件时钟如何为两个操作系统内核提供服务的?本文将揭开xenomai双核系统下clock机制的面纱。
首先回看一下之前的文章xenomai内核解析之xenomai的组成结构。
我们说到:在内核空间,在标准linux基础上添加一个实时内核Cobalt,得益于基于ADEOS(Adaptive Domain Environment for Operating System),使Cobalt内核在内核空间与linux内核并存,并把标准的Linux内核作为实时内核中的一个idle进程在实时内核上调度。
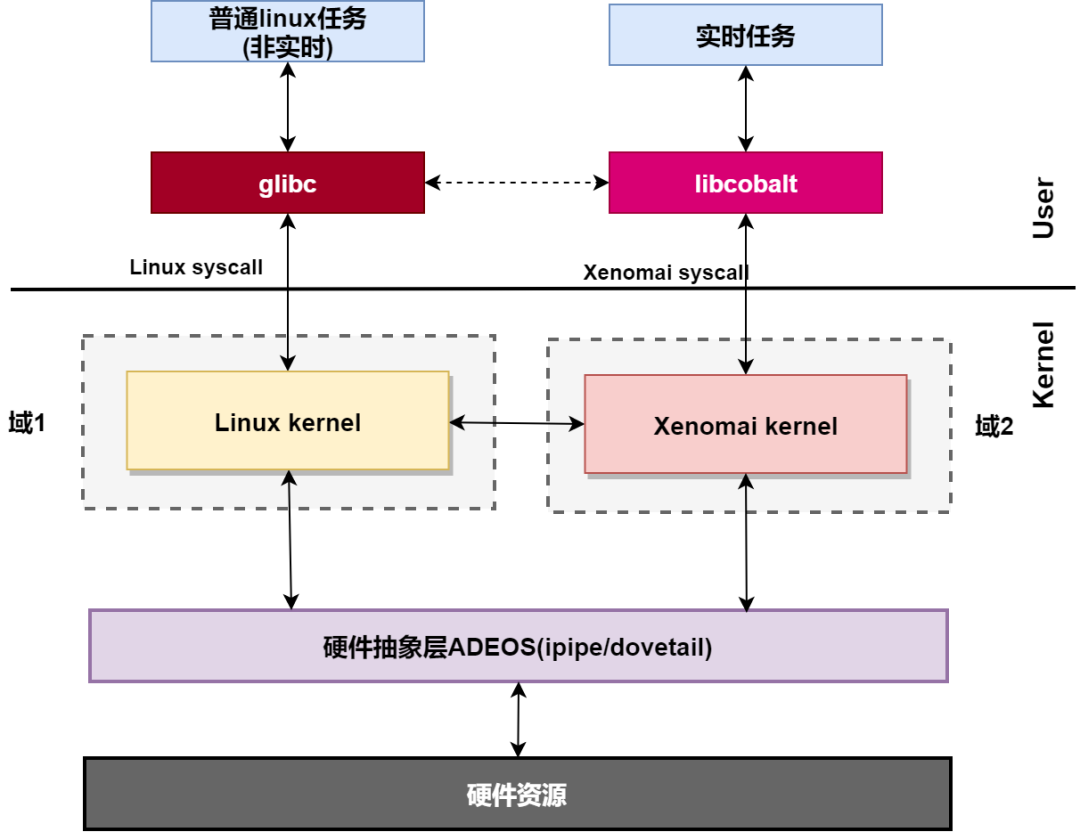
“并把标准的Linux内核作为实时内核中的一个idle进程在实时内核上调度“,这句话是本文的重点,接下我们先从Linux时间子系统介绍。
中间部分为个人分析代码简单记录,比较啰嗦,如果你只是想知道xenomai时钟子系统与linux时钟子系统之间的关系可直接到2.6 xenomai内核下Linux时钟工作流程查看总结。
一、linux时间子系统
linux时间子系统是一个很大的板块,控制着linux的方方面面。这里只说双核相关的部分。即侧重于Linux与底层硬件交互这一块。
关于Linux时间子系统的详细内容,请移步蜗窝科技关系Linux 时间子系统专栏。文章中Linux时间子系统大部分内容来自于此,在此谢过~
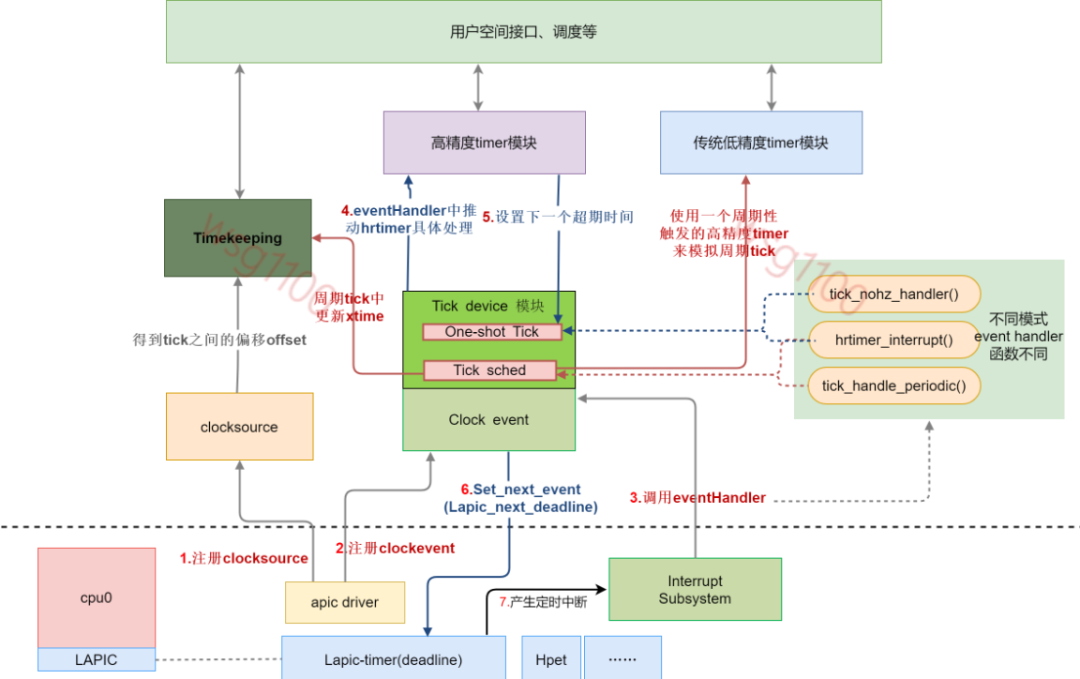
Linux时间子系统框架大致如下:
1.1 tick device
处理器采用时钟定时器来周期性地提供系统脉搏。时钟中断是普通外设中断的一种。调度器利用时钟中断来定时检测当前正在运行的线程是否需要调度。提供时钟中断的设备就是tick device。
如今在多核架构下,每个CPU形成了自己的一个小系统,有自己的调度、自己的进程统计等,这个小系统拥有自己的tick device,而且每个CPU上tick device是唯一的,tick device可以工作在periodic mode或者one shot mode,这是和系统配置有关(由于中断的处理会影响实时性,一般将xenomai所在CPU的tick device配置工作在one shot mode模式)。
因此,整个系统中,在tick device layer,有多少个cpu,就会有多少个tick device,称为local tick device。当然,有些事情(例如整个系统的负荷计算)不适合在local tick驱动下进行,因此,所有的local tick device中会有一个被选择做global tick device,该device负责维护整个系统的jiffies,更新wall clock,计算全局负荷什么的。
tick_device 数据结构如下:
/*tick device可以工作在两种模式下,一种是周期性tick模式,另外一种是one shot模式。*/
enumtick_device_mode{
TICKDEV_MODE_PERIODIC,
TICKDEV_MODE_ONESHOT,/*oneshot模式主要和tickless系统以及高精度timer有关*/
};
structtick_device{
structclock_event_device*evtdev;
enumtick_device_modemode;
};
1.2 clock event和clock source
tick device依赖于底层硬件产生定时事件来推动运行,这些产生定时事件的硬件是timer,除此之外还需要一个在指定输入频率的clock下工作的一个counter来提供计时。对形形色色的timer和counter硬件,linux kernel抽象出了通用clock event layer和通用clock source模块,这两个模块和硬件无关。
所谓clock source是用来抽象一个在指定输入频率的clock下工作的一个counter。clock event提供的是一定周期的event,如果应用程序需要读取当前的时间,比如ns精度时,就需要通过timekeeping从clock source中获取与上个tick之间的时间后返回此时时间。
底层的clock source chip驱动通过调用通用clock event和clock source模块的接口函数,注册clock source和clock event设备。
intclocksource_register(structclocksource*cs) voidclockevents_register_device(structclock_event_device*dev)
1.3 clock event 设备注册
每个CPU上tick device是唯一的,但为Tick device提供tick event的timer硬件并不唯一,如上图中有Lapic-timer、lapic-deadline、Hpet等,有多少个timer硬件就注册多少个clock event device,各个cpu的tick device会选择自己适合的那个clock event设备。
clock_event_devic结构如下:
structclock_event_device{
void(*event_handler)(structclock_event_device*);
int(*set_next_event)(unsignedlongevt,structclock_event_device*);
int(*set_next_ktime)(ktime_texpires,structclock_event_device*);
ktime_tnext_event;
u64max_delta_ns;
u64min_delta_ns;
u32mult;
u32shift;
enumclock_event_statestate_use_accessors;
unsignedintfeatures;
unsignedlongretries;
int(*set_state_periodic)(structclock_event_device*);
int(*set_state_oneshot)(structclock_event_device*);
int(*set_state_oneshot_stopped)(structclock_event_device*);
int(*set_state_shutdown)(structclock_event_device*);
int(*tick_resume)(structclock_event_device*);
void(*broadcast)(conststructcpumask*mask);
void(*suspend)(structclock_event_device*);
void(*resume)(structclock_event_device*);
unsignedlongmin_delta_ticks;
unsignedlongmax_delta_ticks;
constchar*name;
intrating;
intirq;
intbound_on;
conststructcpumask*cpumask;
structlist_headlist;
......
}____cacheline_aligned;
简要说下各成员变量的含义:
event_handler产生了clock event的时候调用的handler,硬件timer中断到来的时候调用该timer中断handler,而在这个中断handler中再调用event_handler。
set_next_event设定产生下一个event。一般是clock的counter的cycle数值,一般的timer硬件都是用cycle值设定会比较方便,当然,不排除有些奇葩可以直接使用ktime(秒、纳秒),这时候clock event device的features成员要打上CLOCK_EVT_FEAT_KTIME的标记使用set_next_ktime()函数设置。
set_state_periodic、set_state_oneshot、set_state_shutdown设置各个模式的配置函数。
broadcast上面说到每个cpu有一个tcik device外还需要一个全局的clock event,为各CPU提供唤醒等功能。
rating该clock evnet的精度等级,在选做tick device时做参考。
irq 该clock event对应的系统中断号。
voidclockevents_register_device(structclock_event_device*dev)
{
unsignedlongflags;
......
if(!dev->cpumask){
WARN_ON(num_possible_cpus()>1);
dev->cpumask=cpumask_of(smp_processor_id());
}
list_add(&dev->list,&clockevent_devices);/*加入clockevent设备全局列表*/
tick_check_new_device(dev);/*让上层软件知道底层又注册一个新的clockdevice,当然,是否上层软件要使用这个新的clockeventdevice是上层软件的事情*/
clockevents_notify_released();
......
}
clock event device的cpumask指明该设备为哪一个CPU工作,如果没有设定并且cpu的个数大于1的时候要给出warning信息并进行设定(设定为当前运行该代码的那个CPU core)。在multi core的环境下,底层driver在调用该接口函数注册clock event设备之前就需要设定cpumask成员,毕竟一个timer硬件附着在哪一个cpu上底层硬件最清楚。这里只是对未做设定的的设定为当前CPU。
将新注册的clockevent device添加到全局链表clockevent_devices,然后调用tick_check_new_device()让上层软件知道底层又注册一个新的clock device,当然,是否上层软件会通过一系列判断后来决定是否使用这个clock event作为tick device。如果被选作tick device 会为该clock event设置回调函数event_handler,如上图所示:event_handler不同的模式会被设置为tick_handle_periodic()、hrtimer_interrupt()或tick_nohz_handler()。代码详细解析,后面会简要说明;
对应x86平台,clock event device有APIC-timer、hept,hept的rating没有lapic timer高。所以每个CPU上的loacl-apic timer作为该CPU的tick device。
//archx86kernelhpet.c staticstructclock_event_devicelapic_clockevent={ .name="lapic", .features=CLOCK_EVT_FEAT_PERIODIC| CLOCK_EVT_FEAT_ONESHOT|CLOCK_EVT_FEAT_C3STOP |CLOCK_EVT_FEAT_DUMMY, .shift=32, .set_state_shutdown=lapic_timer_shutdown, .set_state_periodic=lapic_timer_set_periodic, .set_state_oneshot=lapic_timer_set_oneshot, .set_state_oneshot_stopped=lapic_timer_shutdown, .set_next_event=lapic_next_event, .broadcast=lapic_timer_broadcast, .rating=100, .irq=-1, }; //archx86kernelapicapic.c staticstructclock_event_devicehpet_clockevent={ .name="hpet", .features=CLOCK_EVT_FEAT_PERIODIC| CLOCK_EVT_FEAT_ONESHOT, .set_state_periodic=hpet_legacy_set_periodic, .set_state_oneshot=hpet_legacy_set_oneshot, .set_state_shutdown=hpet_legacy_shutdown, .tick_resume=hpet_legacy_resume, .set_next_event=hpet_legacy_next_event, .irq=0, .rating=50, };
apic的中断函数smp_apic_timer_interrupt(),然后调用local_apic_timer_interrupt():
__visiblevoid__irq_entrysmp_apic_timer_interrupt(structpt_regs*regs)
{
structpt_regs*old_regs=set_irq_regs(regs);
/*
*NOTE!We'dbetterACKtheirqimmediately,
*becausetimerhandlingcanbeslow.
*
*update_process_times()expectsustohavedoneirq_enter().
*Besides,ifwedon'ttimerinterruptsignoretheglobal
*interruptlock,whichistheWrongThing(tm)todo.
*/
entering_ack_irq();
trace_local_timer_entry(LOCAL_TIMER_VECTOR);
local_apic_timer_interrupt();/*执行handle*/
trace_local_timer_exit(LOCAL_TIMER_VECTOR);
exiting_irq();
set_irq_regs(old_regs);
}
staticvoidlocal_apic_timer_interrupt(void)
{
structclock_event_device*evt=this_cpu_ptr(&lapic_events);
if(!evt->event_handler){
pr_warning("SpuriousLAPICtimerinterruptoncpu%d
",
smp_processor_id());
/*Switchitoff*/
lapic_timer_shutdown(evt);
return;
}
inc_irq_stat(apic_timer_irqs);
evt->event_handler(evt);/*执行event_handler*/
}
local_apic_timer_interrupt()先获得产生该中断的clock_event_device,然后执行event_handler()。
1.4 clock source设备注册
linux 中clock source主要与timekeeping模块关联,这里不细说,查看系统中的可用的clock source:
$cat/sys/devices/system/clocksource/clocksource0/available_clocksource tschpetacpi_pm
查看系统中当前使用的clock source的信息:
$cat/sys/devices/system/clocksource/clocksource0/current_clocksource tsc
这里主要说一下与xenomai相关的clock source 设备TSC(Time Stamp Counter),x86处理器提供的TSC是一个高分辨率计数器,以恒定速率运行(在较旧的处理器上,TSC计算内部处理器的时钟周期,这意味着当处理器的频率缩放比例改变时,TSC的频率也会改变,现今的TSC在处理器的所有操作状态下均以恒定的速率运行,其频率远远超过了处理器的频率),可以用单指令RDTSC读取。
structclocksourceclocksource_tsc={
.name="tsc",
.rating=300,
.read=read_tsc,
.mask=CLOCKSOURCE_MASK(64),
.flags=CLOCK_SOURCE_IS_CONTINUOUS|
CLOCK_SOURCE_MUST_VERIFY,
.archdata={.vclock_mode=VCLOCK_TSC},
.resume=tsc_resume,
.mark_unstable=tsc_cs_mark_unstable,
.tick_stable=tsc_cs_tick_stable,
};
tsc在init_tsc_clocksource()中调用int clocksource_register(struct clocksource *cs)注册,流程如下:
1.调用__clocksource_update_freq_scale(cs, scale, freq),根据tsc频率计算mult和shift,具体计算流程文章实时内核与linux内核时钟漂移过大原因.docx已分析过。
2.调用clocksource_enqueue(cs)根据clock source按照rating的顺序插入到全局链表clock source list中
3.选择一个合适的clock source。kernel当然是选用一个rating最高的clocksource作为当前的正在使用的那个clock source。每当注册一个新的clock source的时候调用clocksource_select进行选择,毕竟有可能注册了一个精度更高的clock source。X86系统中tsc rating最高,为300。
到此clock source注册就注册完了。
1.5 时间子系统的数据流和控制流
上面说到tick device的几种模式,下面结合整个系统模式说明。高精度的timer需要高精度的clock event,工作在one shot mode的tick device工提供高精度的clock event(clockeventHandler中处理高精度timer)。因此,基于one shot mode下的tick device,系统实现了高精度timer,系统的各个模块可以使用高精度timer的接口来完成定时服务。
虽然有了高精度timer的出现, 内核并没有抛弃老的低精度timer机制(内核开发人员试图整合高精度timer和低精度的timer,不过失败了,所以目前内核中,两种timer是同时存在的)。当系统处于高精度timer的时候(tick device处于one shot mode),系统会setup一个特别的高精度timer(可以称之sched timer),该高精度timer会周期性的触发,从而模拟的传统的periodic tick,从而推动了传统低精度timer的运转。
因此,一些传统的内核模块仍然可以调用经典的低精度timer模块的接口。系统可根据需要配置为以下几种模式,具体配置见其他文档:
1、使用低精度timer + 周期tick
根据当前系统的配置情况(周期性tick),会调用tick_setup_periodic函数,这时候,该tick device对应的clock event device的clock event handler被设置为tick_handle_periodic。底层硬件会周期性的产生中断,从而会周期性的调用tick_handle_periodic从而驱动整个系统的运转。
这时候高精度timer模块是运行在低精度的模式,也就是说这些hrtimer虽然是按照高精度timer的红黑树进行组织,但是系统只是在每一周期性tick到来的时候调用hrtimer_run_queues函数,来检查是否有expire的hrtimer。毫无疑问,这里的高精度timer也就是没有意义了。
2、低精度timer + Dynamic Tick
系统开始的时候并不是直接进入Dynamic tick mode的,而是经历一个切换过程。开始的时候,系统运行在周期tick的模式下,各个cpu对应的tick device的(clock event device的)event handler是tick_handle_periodic。在timer的软中断上下文中,会调用tick_check_oneshot_change进行是否切换到one shot模式的检查,如果系统中有支持one-shot的clock event device,并且没有配置高精度timer的话,那么就会发生tick mode的切换(调用tick_nohz_switch_to_nohz),这时候,tick device会切换到one shot模式,而event handler被设置为tick_nohz_handler。
由于这时候的clock event device工作在one shot模式,因此当系统正常运行的时候,在event handler中每次都要reprogram clock event,以便正常产生tick。当cpu运行idle进程的时候,clock event device不再reprogram产生下次的tick信号,这样,整个系统的周期性的tick就停下来。
高精度timer和低精度timer的工作原理同上。
3、高精度timer + Dynamic Tick
同样的,系统开始的时候并不是直接进入Dynamic tick mode的,而是经历一个切换过程。系统开始的时候是运行在周期tick的模式下,event handler是tick_handle_periodic。在周期tick的软中断上下文中(参考run_timer_softirq),如果满足条件,会调用hrtimer_switch_to_hres将hrtimer从低精度模式切换到高精度模式上。这时候,系统会有下面的动作:
(1)Tick device的clock event设备切换到oneshot mode(参考tick_init_highres函数)
(2)Tick device的clock event设备的event handler会更新为hrtimer_interrupt(参考tick_init_highres函数)
(3)设定sched timer(即模拟周期tick那个高精度timer,参考tick_setup_sched_timer函数)这样,当下一次tick到来的时候,系统会调用hrtimer_interrupt来处理这个tick(该tick是通过sched timer产生的)。
在Dynamic tick的模式下,各个cpu的tick device工作在one shot模式,该tick device对应的clock event设备也工作在one shot的模式,这时候,硬件Timer的中断不会周期性的产生,但是linux kernel中很多的模块是依赖于周期性的tick的,因此,在这种情况下,系统使用hrtime模拟了一个周期性的tick。
在切换到dynamic tick模式的时候会初始化这个高精度timer,该高精度timer的回调函数是tick_sched_timer。这个函数执行的函数类似周期性tick中event handler执行的内容。不过在最后会reprogram该高精度timer,以便可以周期性的产生clock event。当系统进入idle的时候,就会stop这个高精度timer,这样,当没有用户事件的时候,CPU可以持续在idle状态,从而减少功耗。
4、高精度timer + 周期性Tick
这种配置不多见,多半是由于硬件无法支持one shot的clock event device,这种情况下,整个系统仍然是运行在周期tick的模式下。
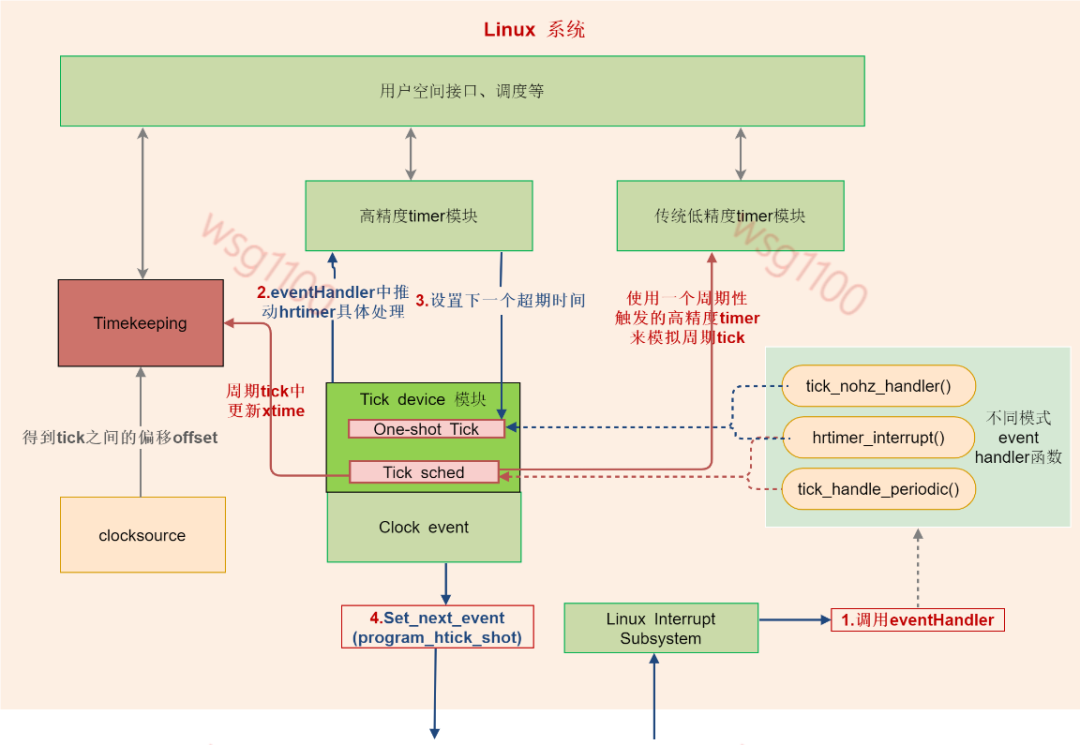
总结一下:linux启动过程中初始化时钟系统,当xenomai内核未启动时,linux直接对底层硬件lapic-timer编程,底层硬件lapic-timer产生中断推动整个Linux中的各个时钟及调度运行。
我们可以将Linux抽出如下图,只需要为Linux提供设置下一个时钟事件set_next_event()和提供event触发eventHandler()执行两个接口就能推动整个linux时间子系统运转,下面解析Xenomai是怎样为linux提供这两个接口的,达到控制整个时钟系统的。
二、xenomai时间子系统
2.1 xnclock
我们知道x86下每个cpu核有一个lapic,lapic中有定时硬件lapic-timer和hpet。tsc作为timeline,提供计时,lapic-timer用来产生clock event。对于现今X86 CPU 操作系统一般都是使用TSC和lapic-timer作为clock source和clock event,因为精度最高(Atom 系列处理器可能会有区别).
xenomai的默认时间管理对象是xnclock,xnclock管理着xenomai整个系统的时间、任务定时、调度等,xnclok的默认时钟源为TSC。当然我们可以自定义clocksource。比如在TSC不可靠的系统上,可以使用外部定时硬件来作为时钟源,当自定义时钟时需要实现结构体中的宏CONFIG_XENO_OPT_EXTCLOCK包含的几个必要函数,且编译配置使能CONFIG_XENO_OPT_EXTCLOCK。
注意:这里的自定义时钟源只是将TSC替换为其他时钟源,产生event的还是lapic-timer.
structxnclock{
/**(ns)*/
xnticks_twallclock_offset;/*获取时钟偏移:timekeeping - tsc*/
/**(ns)*/
xnticks_tresolution;
/**(rawclockticks).*/
structxnclock_gravitygravity;
/**Clockname.*/
constchar*name;
struct{
#ifdefCONFIG_XENO_OPT_EXTCLOCK
xnticks_t(*read_raw)(structxnclock*clock);
xnticks_t(*read_monotonic)(structxnclock*clock);
int(*set_time)(structxnclock*clock,
conststructtimespec*ts);
xnsticks_t(*ns_to_ticks)(structxnclock*clock,
xnsticks_tns);
xnsticks_t(*ticks_to_ns)(structxnclock*clock,
xnsticks_tticks);
xnsticks_t(*ticks_to_ns_rounded)(structxnclock*clock,
xnsticks_tticks);
void(*program_local_shot)(structxnclock*clock,
structxnsched*sched);
void(*program_remote_shot)(structxnclock*clock,
structxnsched*sched);
#endif
int(*set_gravity)(structxnclock*clock,
conststructxnclock_gravity*p);
void(*reset_gravity)(structxnclock*clock);
#ifdefCONFIG_XENO_OPT_VFILE
void(*print_status)(structxnclock*clock,
structxnvfile_regular_iterator*it);
#endif
}ops;
/*Privatesection.*/
structxntimerdata*timerdata;
intid;
#ifdefCONFIG_SMP
/**PossibleCPUaffinityofclockbeat.*/
cpumask_taffinity;
#endif
#ifdefCONFIG_XENO_OPT_STATS
structxnvfile_snapshottimer_vfile;
structxnvfile_rev_tagtimer_revtag;
structlist_headtimerq;
intnrtimers;/*统计挂在xnclockxntimer的数量*/
#endif/*CONFIG_XENO_OPT_STATS*/
#ifdefCONFIG_XENO_OPT_VFILE
structxnvfile_regularvfile;//vfile.ops=&clock_ops
#endif
};
wallclock_offset:linux系统wall time(1970开始的时间值)与系统TSC cycle转换为时间的偏移
resolution:该xnclock的精度
struct xnclock_gravity gravity:该xnclok下,中断、内核、用户空间程序定时器的调整量,对系统精确定时很重要,后面会说到。
structxnclock_gravity{
unsignedlongirq;
unsignedlongkernel;
unsignedlonguser;
};
ops:该xnclok的各操作函数。
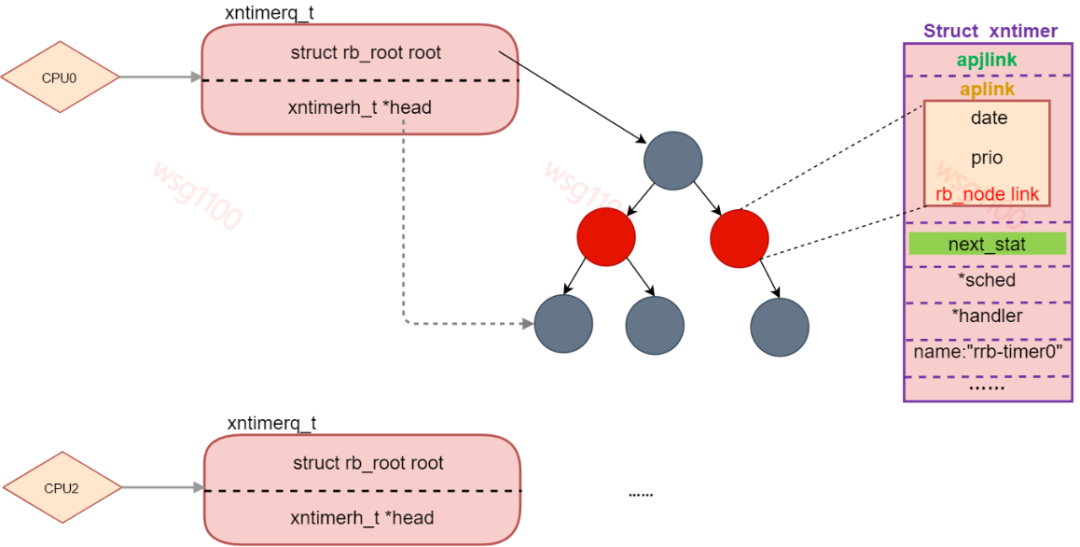
timerdata:xntimer 管理结构头节点,当系统中使用红黑树来管理xntimer时,他是红黑树head节点,当系统使用优先级链表来管理时它是链表头节点,系统会为每个cpu分配一个timerdata,管理着本CPU上已启动的xntimer,当为红黑树时head始终指向最近到期的xntimer,当某个cpu上一个clockevent到来时,xnclock会从该CPU timerdata取出head指向的那个timer看是否到期,然后进一步处理。
#ifdefined(CONFIG_XENO_OPT_TIMER_RBTREE)
typedefstruct{
structrb_rootroot;
xntimerh_t*head;
}xntimerq_t;
#else
typedefstructlist_headxntimerq_t;
#endif
structxntimerdata{
xntimerq_tq;
};
timerq:不论是属于哪个cpu的xntimer初始化后都会挂到这个链表上,nrtimers挂在timerq上xntimer的个数
vfile:proc文件系统操作接口,可通过proc查看xenomai clock信息。
cat/proc/xenomai/clock/coreclok gravity:irq=99kernel=1334user=1334 devices:timer=lapic-deadline,clock=tsc status:on setup:99 ticks:376931548560(0057c2defd90)
gravity即xnclock中的结构体gravity的值,devices表示xenomai用于产生clock event的硬件timer,clock为xnclock计时的时钟源。
xenomai 内核默认定义xnclock如下,名字和结构体名一样,至于xnclock怎么和硬件timer 、tsc联系起来后面分析:
structxnclocknkclock={
.name="coreclk",
.resolution=1,/*nanosecond.*/
.ops={
.set_gravity=set_core_clock_gravity,
.reset_gravity=reset_core_clock_gravity,
.print_status=print_core_clock_status,
},
.id=-1,
};
2.2 xntimer
实时任务的所有定时行为最后都会落到内核中的xntimer上,而xnclock管理着硬件clock event,xntimer要完成定时就需要xnclock来获取起始时间,xntimer结构如下:
structxntimer{
#ifdefCONFIG_XENO_OPT_EXTCLOCK
structxnclock*clock;
#endif
/**Linkintimerslist.*/
xntimerh_taplink;
structlist_headadjlink;
/**Timerstatus.*/
unsignedlongstatus;
/**Periodicinterval(clockticks,0==oneshot).*/
xnticks_tinterval;
/**Periodicinterval(nanoseconds,0==oneshot).*/
xnticks_tinterval_ns;
/**Countoftimerticksinperiodicmode.*/
xnticks_tperiodic_ticks;
/**Firsttickdateinperiodicmode.*/
xnticks_tstart_date;
/**Dateofnextperiodicreleasepoint(timerticks).*/
xnticks_tpexpect_ticks;
/** Sched structure to which the timer is attached. 附加计时器的Sched结构。*/
structxnsched*sched;
/**Timeouthandler.*/
void(*handler)(structxntimer*timer);
#ifdefCONFIG_XENO_OPT_STATS
#ifdefCONFIG_XENO_OPT_EXTCLOCK
structxnclock*tracker;
#endif
/**Timernametobedisplayed.*/
charname[XNOBJECT_NAME_LEN];
/**Timerholderintimebase.*/
structlist_headnext_stat;
/**Numberoftimerschedules.*/
xnstat_counter_tscheduled;
/**Numberoftimerevents.*/
xnstat_counter_tfired;
#endif/*CONFIG_XENO_OPT_STATS*/
};
clock:当自定义外部时钟源时,使用外部时钟时的xnclock.
aplink:上面介绍新clock时说到timerdata,当xntimer启动是,aplink就会插入到所在cpu的timerdata中,当timerdata为红黑树时,aplink就是一个rb节点,否则是一个链表节点。分别如下:
//优先级链表结构
structxntlholder{
structlist_headlink;
xnticks_tkey;
intprio;
};
typedefstructxntlholderxntimerh_t;
//树结构
typedefstruct{
unsignedlonglongdate;
unsignedprio;
structrb_nodelink;
}xntimerh_t;
系统默认配置以红黑树形式管理xntimer,date表示定时器的多久后到期;prio表示该定时器的优先级,当加入链表时先date来排序,如果几个定时器date相同就看优先级,优先级高的先处理;link为红黑树节点。
status:定时器状态,所有状态为如下:
#defineXNTIMER_DEQUEUED0x00000001/*没有挂在xnclock上*/ #defineXNTIMER_KILLED0x00000002/*该定时器已经被取消*/ #defineXNTIMER_PERIODIC0x00000004/*该定时器是一个周期定时器*/ #defineXNTIMER_REALTIME0x00000008/*定时器相对于Linuxwalltime定时*/ #defineXNTIMER_FIRED0x00000010/*定时已经到期*/ #defineXNTIMER_NOBLCK0x00000020/*非阻塞定时器*/ #defineXNTIMER_RUNNING0x00000040/*定时器已经start*/ #defineXNTIMER_KGRAVITY0x00000080/*该timer是一个内核态timer*/ #defineXNTIMER_UGRAVITY0x00000100/*该timer是一个用户态timer*/ #defineXNTIMER_IGRAVITY0/*该timer是一个中断timer*/
interval、interval_ns:周期定时器的定时周期,分别是tick 和ns,0表示这个xntimer 是单次定时的。
handler:定时器到期后执行的函数。
sched:该timer所在的sched,每个cpu核上有一个sched,管理本cpu上的线程调度,timer又需要本cpu的lapic定时,所以指定了sched就指定了该timer所属cpu。
xntimer 使用需要先调用xntimer_init()初始化xntimer结构成员,然后xntimer_start()启动这个xntimer,启动timer就是将它插入xnclock管理的红黑树。
xntimer_init()是一个宏,内部调用__xntimer_init初始化timer,参数timer:需要初始化的timer;clock:该timer是依附于哪个xnclock,也就是说哪个xnclock来处理我是否触发,没有自定义就是xnclock,在timer_start的时候就会将这个timer挂到对应的xnclock上去;handler:该timer到期后执行的hanler;sched:timer所属的sched;flags:指定该timer标志。
#definexntimer_init(__timer,__clock,__handler,__sched,__flags)
do{
__xntimer_init(__timer,__clock,__handler,__sched,__flags);
xntimer_set_name(__timer,#__handler);
}while(0)
void__xntimer_init(structxntimer*timer,
structxnclock*clock,
void(*handler)(structxntimer*timer),
structxnsched*sched,
intflags)
{
spl_ts__maybe_unused;
#ifdefCONFIG_XENO_OPT_EXTCLOCK
timer->clock=clock;
#endif
xntimerh_init(&timer->aplink);
xntimerh_date(&timer->aplink)=XN_INFINITE;//0
xntimer_set_priority(timer,XNTIMER_STDPRIO);
timer->status=(XNTIMER_DEQUEUED|(flags&XNTIMER_INIT_MASK));//(0x01|flags&0x000001A0)
timer->handler=handler;
timer->interval_ns=0;
timer->sched=NULL;
/*
*Setthetimeraffinity,preferablytoxnsched_cpu(sched)if
*schedwasgiven,CPU0otherwise.
*/
if(sched==NULL)
sched=xnsched_struct(0);
xntimer_set_affinity(timer,sched);
#ifdefCONFIG_XENO_OPT_STATS
#ifdefCONFIG_XENO_OPT_EXTCLOCK
timer->tracker=clock;
#endif
ksformat(timer->name,XNOBJECT_NAME_LEN,"%d/%s",
task_pid_nr(current),current->comm);
xntimer_reset_stats(timer);
xnlock_get_irqsave(&nklock,s);
list_add_tail(&timer->next_stat,&clock->timerq);
clock->nrtimers++;
xnvfile_touch(&clock->timer_vfile);
xnlock_put_irqrestore(&nklock,s);
#endif/*CONFIG_XENO_OPT_STATS*/
}
前面几行都是初始化xntimer 结构体指针,xntimer_set_affinity(timer, sched)表示将timer移到sched上(timer->shced=sched)。后面将这个初始化的time加到xnclock 的timerq队列,nrtimers加1。基本成员初始化完了,还有优先级没有设置,aplink中的优先级就代表了该timer的优先级:
staticinlinevoidxntimer_set_priority(structxntimer*timer,
intprio)
{
xntimerh_prio(&timer->aplink)=prio;/*设置timer节点优先级*/
}
启动一个定时器xntimer_start()代码如下:
intxntimer_start(structxntimer*timer,
xnticks_tvalue,xnticks_tinterval,
xntmode_tmode)
{
structxnclock*clock=xntimer_clock(timer);
xntimerq_t*q=xntimer_percpu_queue(timer);
xnticks_tdate,now,delay,period;
unsignedlonggravity;
intret=0;
trace_cobalt_timer_start(timer,value,interval,mode);
if((timer->status&XNTIMER_DEQUEUED)==0)
xntimer_dequeue(timer,q);
now=xnclock_read_raw(clock);
timer->status&=~(XNTIMER_REALTIME|XNTIMER_FIRED|XNTIMER_PERIODIC);
switch(mode){
caseXN_RELATIVE:
if((xnsticks_t)value< 0)
return -ETIMEDOUT;
date = xnclock_ns_to_ticks(clock, value) + now;
break;
case XN_REALTIME:
timer->status|=XNTIMER_REALTIME;
value-=xnclock_get_offset(clock);
/*fallthrough*/
default:/*XN_ABSOLUTE||XN_REALTIME*/
date=xnclock_ns_to_ticks(clock,value);
if((xnsticks_t)(date-now)<= 0) {
if (interval == XN_INFINITE)
return -ETIMEDOUT;
/*
* We are late on arrival for the first
* delivery, wait for the next shot on the
* periodic time line.
*/
delay = now - date;
period = xnclock_ns_to_ticks(clock, interval);
date += period * (xnarch_div64(delay, period) + 1);
}
break;
}
/*
* To cope with the basic system latency, we apply a clock
* gravity value, which is the amount of time expressed in
* clock ticks by which we should anticipate the shot for any
* outstanding timer. The gravity value varies with the type
* of context the timer wakes up, i.e. irq handler, kernel or
* user thread.
*/
gravity = xntimer_gravity(timer);
xntimerh_date(&timer->aplink)=date-gravity;
if(now>=xntimerh_date(&timer->aplink))
xntimerh_date(&timer->aplink)+=gravity/2;
timer->interval_ns=XN_INFINITE;
timer->interval=XN_INFINITE;
if(interval!=XN_INFINITE){
timer->interval_ns=interval;
timer->interval=xnclock_ns_to_ticks(clock,interval);
timer->periodic_ticks=0;
timer->start_date=date;
timer->pexpect_ticks=0;
timer->status|=XNTIMER_PERIODIC;
}
timer->status|=XNTIMER_RUNNING;
xntimer_enqueue_and_program(timer,q);
returnret;
}
启动一个timer即将该timer插入xnclock 红黑树xntimerq_t。参数value表示定时时间、interval为0表示这个timer是单次触发,非0表示周期定时器定时间隔,value和interval的单位由mode决定,当mode设置为XN_RELATIVE表示相对定时定时、XN_REALTIME为相对linux时间定时,时间都为ns,其他则为绝对定时单位为timer的tick。
首先取出红黑树根节点q,如果这个timer的状态是从队列删除(其他地方取消了这个定时器),就先把他从红黑树中删除。读取tsc得到此时tsc的tick值now,然后根据参数计算timer的到期时间date,中间将单位转换为ticks。下面开始设置红黑树中的最终值,xntimer_gravity(timer)根据这个timer为谁服务取出对应的gravity。
staticinlineunsignedlongxntimer_gravity(structxntimer*timer)
{
structxnclock*clock=xntimer_clock(timer);
if(timer->status&XNTIMER_KGRAVITY)/*内核空间定时器*/
returnclock->gravity.kernel;
if(timer->status&XNTIMER_UGRAVITY)/*用户空间定时器*/
returnclock->gravity.user;
returnclock->gravity.irq;/*中断*/
}
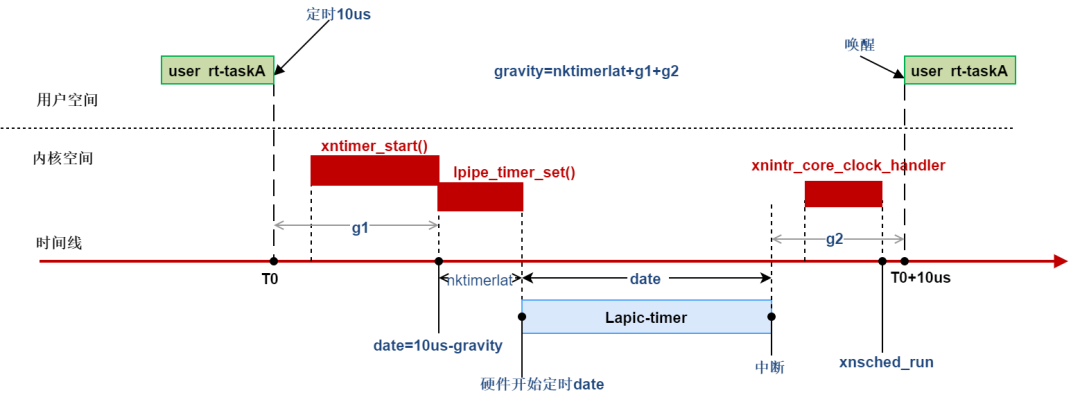
为什么要设置gravity呢?xenomai是个实时系统必须保证定时器的精确,xntimer都是由硬件timer产生中断后处理的,如果没有gravity,对于用户空间实时任务RT:假如此时时间刻度是0,该任务定时10us后触发定时器,10us后,产生了中断,此时时间刻度为10us,开始处理xntimer,然后切换回内核空间执行调度,最后切换回用户空间,从定时器到期到最后切换回RT也是需要时间的,已经超过RT所定的10us,因此,需要得到定时器超时->回到用户空间的这段时间gravity;不同空间的任务经过的路径不一样,所以针对kernel、user和irq分别计算gravity,当任务定时,定时器到期时间date-gravity才是xntimer的触发时间。当切换回原来的任务时刚好是定时时间。
gravity是怎样计算的,xenomai初始化相关文章分析;
最后将timer状态设置为XNTIMER_RUNNING,调用xntimer_enqueue_and_program(timer, q)将timer按超时时间date和优先级插入该CPU红黑树timedata,新加入了一个timer就需要重新看看,最近超时的timer是哪一个,然后设置底层硬件timer的下一个event时间,为最近一个要超时的timer date:
voidxntimer_enqueue_and_program(structxntimer*timer,xntimerq_t*q)
{
xntimer_enqueue(timer,q);/*添加到红黑树*/
if(xntimer_heading_p(timer)){/*这个timer处于第一个节点或者需要重新调度的sched的第二个节点*/
structxnsched*sched=xntimer_sched(timer);/*timer所在的sched*/
structxnclock*clock=xntimer_clock(timer);/*当前存数所在的CPU*/
if(sched!=xnsched_current())/*不是当前CPU任务的定时器*/
xnclock_remote_shot(clock,sched);/*给当前CPU发送ipipe_send_ipi(IPIPE_HRTIMER_IPI),让sched对应CPU重新调度*/
else
xnclock_program_shot(clock,sched);/*设置下一个oneshot*/
}
}
intxntimer_heading_p(structxntimer*timer)
{
structxnsched*sched=timer->sched;
xntimerq_t*q;
xntimerh_t*h;
q=xntimer_percpu_queue(timer);
h=xntimerq_head(q);
if(h==&timer->aplink)/*timer就是第一个*/
return1;
if(sched->lflags&XNHDEFER){/*处于重新调度状态*/
h=xntimerq_second(q,h);/*这个timer处于重新调度状态下红黑树下*/
if(h==&timer->aplink)
return1;
}
return0;
}
由于head始终指向时间最小的timer,xntimer_heading_p()中先看head是不是刚刚插入的这个timer,如果是并且是本CPU上的timer就直接设置这timer的时间为lapic-timer的中断时间,对应22行返回->执行10行。
如果是最小但是不是本CPU上的就需要通过ipipe向timer所在CPU发送一个中断信号IPIPE_HRTIMER_IPI,告诉那个cpu,那个cpu就会执行中断处理函数xnintr_core_clock_handler(),对应22行返回->执行8行,为什么是IPIPE_HRTIMER_IPI?相当于模拟底层lapic-timer 产生了一个event事件,ipipe会让那个cpu 执行xnintr_core_clock_handler()对timer进行一个刷新,重新对底层硬件timer编程。
如果新插入的timer不是最小的,但是所在的sched处于XNHDEFER状态,说明第一个timer虽然最小,但是这个最小的如果到期暂时不需要处理,那就取出定时时间第二小的timer,看是不是新插入的timer,如果是,返回1,继续决定是编程还是发中断信号。
如果其他情况,那就不用管了,启动定时器流程完毕。一个一个timer到期后总会处理到新插入的这个的。
其中的向某个cpu发送中断信号函数如下,IPIPE_HRTIMER_IPI是注册到xnsched_realtime_domain的中断,底层硬件timer产生中断的中断号就是IPIPE_HRTIMER_VECTOR,这里的发送中断是通过中断控制器APIC来完成的,APIC会给对应cpu产生一个中断,然后就会被ipipe通过ipipeline,优先给xnsched_realtime_domain处理,ipipe domain管理说过:
voidxnclock_core_remote_shot(structxnsched*sched)
{
ipipe_send_ipi(IPIPE_HRTIMER_IPI,*cpumask_of(xnsched_cpu(sched)));
}
intxntimer_setup_ipi(void)
{
returnipipe_request_irq(&xnsched_realtime_domain,
IPIPE_HRTIMER_IPI,
(ipipe_irq_handler_t)xnintr_core_clock_handler,
NULL,NULL);
}
对底层timer编程的函调用xnclock_core_local_shot()函数,最后调用ipipe_timer_set(delay)进行设置,event时间:
staticinlinevoidxnclock_program_shot(structxnclock*clock,
structxnsched*sched)
{
xnclock_core_local_shot(sched);
}
voidxnclock_core_local_shot(structxnsched*sched)
{
.......
delay=xntimerh_date(&timer->aplink)-xnclock_core_read_raw();
if(delay< 0)
delay = 0;
else if (delay >ULONG_MAX)
delay=ULONG_MAX;
ipipe_timer_set(delay);
}
ipipe_timer_set()中先获取这个cpu的percpu_timer t,然后将定时时间转换为硬件的tick数,最后调用t->set(tdelay, t->timer_set)进行设置。这里的percpu_timer 与ipipe 相关下面解析,这里只用知道最后是调用了percpu_timer 的set函数,这个set函数是直接设置硬件lapic-timer的。
voidipipe_timer_set(unsignedlongcdelay)
{
unsignedlongtdelay;
structipipe_timer*t;
t=__ipipe_raw_cpu_read(percpu_timer);
.......
/*将时间转换定时器频率数*/
tdelay=cdelay;
if(t->c2t_integ!=1)
tdelay*=t->c2t_integ;
if(t->c2t_frac)
tdelay+=((unsignedlonglong)cdelay*t->c2t_frac)>>32;
if(tdelay< t->min_delay_ticks)
tdelay=t->min_delay_ticks;
if(tdelay>t->max_delay_ticks)
tdelay=t->max_delay_ticks;
if(t->set(tdelay,t->timer_set)< 0)
ipipe_raise_irq(t->irq);
}
总结:启动一个xntimer,首先确定属于哪个cpu,然后将它插入到该cpu的xntimer管理结构timerdata,插入时按定时长短和优先级来决定,最后设置底层硬件timer产生下一个中断的时间点。
2.3 ipipe tick设备管理
linux时间系统中说到有多少个硬件timer,就会注册多少个clock event device,最后linux会为每个cpu选择一个合适的clock event来为tick device产生event。xenomai系统的运行也需要这么一个合适的硬件timer来产生event,由于xenomai需要的硬件都是由ipipe来提供,所以ipipe需要知道系统中有哪些clock event device被注册,然后ipipe为每一个cpu核选择一个合适的。
ipipe将linux中clock event device按xenomai系统需要重新抽象为结构体struct ipipe_timer,系统中有一个全局链表timer,当底层驱动调用clockevents_register_device,注册clock event设备时ipipe对应的创建一个ipipe_timer插入链表timer。struct ipipe_timer如下:
structipipe_timer{
intirq;
void(*request)(structipipe_timer*timer,intsteal);
int(*set)(unsignedlongticks,void*timer);
void(*ack)(void);
void(*release)(structipipe_timer*timer);
/*Onlyifregisteringatimerdirectly*/
constchar*name;
unsignedrating;
unsignedlongfreq;
unsignedlongmin_delay_ticks;
unsignedlongmax_delay_ticks;
conststructcpumask*cpumask;
/*Forinternaluse*/
void*timer_set;/*pointerpassedto->set()callback*/
structclock_event_device*host_timer;/*依赖的clockevent*/
structlist_headlink;
unsignedc2t_integ;
unsignedc2t_frac;
/*Forclockeventinterception*/
u32real_mult;
u32real_shift;
void(*mode_handler)(enumclock_event_modemode,
structclock_event_device*);
intorig_mode;
int(*orig_set_state_periodic)(structclock_event_device*);
int(*orig_set_state_oneshot)(structclock_event_device*);
int(*orig_set_state_oneshot_stopped)(structclock_event_device*);
int(*orig_set_state_shutdown)(structclock_event_device*);
int(*orig_set_next_event)(unsignedlongevt,
structclock_event_device*cdev);
unsignedint(*refresh_freq)(void);
};
irq:该ipipe_timer所依赖的clock_event_device的中断号,产生中断时ipipe将中断分配给谁处理用到;
request:设定clock_event_device模式的函数
set:设置下一个定时中断的函数,这个就是上面启动xntimer时的那个函数
ack:产生中断后中断清除函数
rating:该clock_event_device的raning级别
freq:该clock_event_device的运行频率
min_delay_ticks、max_delay_ticks:最小、最大定时时间
cpumask:cpu掩码,标识可以为哪个cpu提供定时服务
host_timer:这个ipipe_timer对应是哪个clock_event_device
link:链表节点,加入全局链表timer时使用
orig_set_state_periodic、orig_set_state_oneshot、orig_set_state_oneshot_stopped、orig_set_next_event,为xenomai提供服务需要将clock_event_device中一些已经设置的函数替换,这些用来备份原clock_event_device中的函数。
再来看一看clock xevent注册函数clockevents_register_device(),ipipe补丁在其中插入了一个注册函数ipipe_host_timer_register()先把clock xevent管理起来:
voidclockevents_register_device(structclock_event_device*dev)
{
unsignedlongflags;
......
ipipe_host_timer_register(dev);
....
}
staticintget_dev_mode(structclock_event_device*evtdev)
{
if(clockevent_state_oneshot(evtdev)||
clockevent_state_oneshot_stopped(evtdev))
returnCLOCK_EVT_MODE_ONESHOT;
if(clockevent_state_periodic(evtdev))
returnCLOCK_EVT_MODE_PERIODIC;
if(clockevent_state_shutdown(evtdev))
returnCLOCK_EVT_MODE_SHUTDOWN;
returnCLOCK_EVT_MODE_UNUSED;
}
voidipipe_host_timer_register(structclock_event_device*evtdev)
{
structipipe_timer*timer=evtdev->ipipe_timer;
if(timer==NULL)
return;
timer->orig_mode=CLOCK_EVT_MODE_UNUSED;
if(timer->request==NULL)
timer->request=ipipe_timer_default_request;/*设置request函数*/
/*
*Bydefault,usethesamemethodaslinuxtimer,onARMat
*least,mostset_next_eventmethodsaresafetobecalled
*fromXenomaidomainanyway.
*/
if(timer->set==NULL){
timer->timer_set=evtdev;
timer->set=(typeof(timer->set))evtdev->set_next_event;/*设定的counter的cycle数值*/
}
if(timer->release==NULL)
timer->release=ipipe_timer_default_release;
if(timer->name==NULL)
timer->name=evtdev->name;
if(timer->rating==0)
timer->rating=evtdev->rating;
timer->freq=(1000000000ULL*evtdev->mult)>>evtdev->shift;/*1G*mult>>shift*/
if(timer->min_delay_ticks==0)
timer->min_delay_ticks=
(evtdev->min_delta_ns*evtdev->mult)>>evtdev->shift;
if(timer->max_delay_ticks==0)
timer->max_delay_ticks=
(evtdev->max_delta_ns*evtdev->mult)>>evtdev->shift;
if(timer->cpumask==NULL)
timer->cpumask=evtdev->cpumask;
timer->host_timer=evtdev;
ipipe_timer_register(timer);
}
这里面通过evtdev直接将一些结构体成员赋值,这里需要注意的的是timer->set = (typeof(timer->set))evtdev->set_next_event;对于lapic-timer来说timer->set=lapic_next_event,如果CPU支持tsc deadline特性则是timer->set=lapic_next_deadline,TSC-deadline模式允许软件使用本地APIC timer 在绝对时间发出中断信号,使用tsc来设置deadline,为了全文统一,使用apic-timer,这决定了xenomai是否能直接控制硬件,然后调用ipipe_timer_register()将ipipe_timer添加到链表timer完成注册:
voidipipe_timer_register(structipipe_timer*timer)
{
structipipe_timer*t;
unsignedlongflags;
if(timer->timer_set==NULL)
timer->timer_set=timer;
if(timer->cpumask==NULL)
timer->cpumask=cpumask_of(smp_processor_id());
raw_spin_lock_irqsave(&lock,flags);
list_for_each_entry(t,&timers,link){/*按插入链表*/
if(t->rating<= timer->rating){
__list_add(&timer->link,t->link.prev,&t->link);
gotodone;
}
}
list_add_tail(&timer->link,&timers);/*按插入全局链表尾*/
done:
raw_spin_unlock_irqrestore(&lock,flags);
}
xenomai在每一个cpu核都需要一个ipipe_timer 来推动调度、定时等,ipipe为每个CPU分配了一个ipipe_timer指针percpu_timer,链表timers记录了所有ipipe_timer,这样就可以从链表中选择可供xenomai使用的ipipe_timer:
staticDEFINE_PER_CPU(structipipe_timer*,percpu_timer);
另外,在3.ipipe domian管理说到每个cpu上管理不同域的结构体ipipe_percpu_data,里面有一个成员变量int hrtimer_irq,这个hrtimer_irq是用来存放为这个cpu提供event的硬件timer的中断号的,用于将ipipe_percpu_data与ipipe_timer联系起来,介绍完相关数据结构下面来看xenomai 时钟系统初始化流程。
DECLARE_PER_CPU(structipipe_percpu_data,ipipe_percpu);
2.4 xenomai 时钟系统初始化流程
xenomai内核系统初始化源码文件:kernelxenomaiinit.c,时钟系统在xenomai初始化流程中调用mach_setup()完成硬件相关初始化:
xenomai_init(void)
->mach_setup()
staticint__initmach_setup(void)
{
structipipe_sysinfosysinfo;
intret,virq;
ret=ipipe_select_timers(&xnsched_realtime_cpus);
...
ipipe_get_sysinfo(&sysinfo);/*获取系统ipipe信息*/
if(timerfreq_arg==0)
timerfreq_arg=sysinfo.sys_hrtimer_freq;
if(clockfreq_arg==0)
clockfreq_arg=sysinfo.sys_hrclock_freq;
cobalt_pipeline.timer_freq=timerfreq_arg;
cobalt_pipeline.clock_freq=clockfreq_arg;
if(cobalt_machine.init){
ret=cobalt_machine.init();/*mach_x86_init*/
if(ret)
returnret;
}
ipipe_register_head(&xnsched_realtime_domain,"Xenomai");
......
ret=xnclock_init(cobalt_pipeline.clock_freq);/*初始化xnclock,为Cobalt提供clock服务时钟*/
return0;
首先调用ipipe_select_timers()来为每个cpu选择一个ipipe_timer。
intipipe_select_timers(conststructcpumask*mask)
{
unsignedhrclock_freq;
unsignedlonglongtmp;
structipipe_timer*t;
structclock_event_device*evtdev;
unsignedlongflags;
unsignedcpu;
cpumask_tfixup;
.......
if(__ipipe_hrclock_freq>UINT_MAX){
tmp=__ipipe_hrclock_freq;
do_div(tmp,1000);
hrclock_freq=tmp;
}else
hrclock_freq=__ipipe_hrclock_freq;/*1000ULL*cpu_khz*/
.......
for_each_cpu(cpu,mask){/*从timers为每一个CPU选择一个percpu_timer*/
list_for_each_entry(t,&timers,link){/*遍历ipipe全局timer链表*/
if(!cpumask_test_cpu(cpu,t->cpumask))
continue;
evtdev=t->host_timer;
if(evtdev&&clockevent_state_shutdown(evtdev))/*该CPUtimer被软件shutdown则跳过*/
continue;
gotofound;
}
....
gotoerr_remove_all;
found:
install_pcpu_timer(cpu,hrclock_freq,t);/*设置每一个CPU的timer*/
}
.......
flags=ipipe_critical_enter(ipipe_timer_request_sync);
ipipe_timer_request_sync();/*如果支持,则切换到单触发模式。*/
ipipe_critical_exit(flags);
.......
}
先得到从全局变量cpu_khz得到tsc频率保存到hrclock_freq,然后为xenomai运行的每一个cpu核进行ippie_timer选择,对每一个遍历全局链表timers,取出evtdev,看是否能为该cpu服务,并且没有处于关闭状态。evtdev在Linux没有被使用就会被Linux关闭。最后选出来的也就是lapic-timer 。
找到合适的tevtdev后调用install_pcpu_timer(cpu, hrclock_freq, t),为该cpu设置ipipe_timer:
staticvoidinstall_pcpu_timer(unsignedcpu,unsignedhrclock_freq,
structipipe_timer*t)
{
per_cpu(ipipe_percpu.hrtimer_irq,cpu)=t->irq;
per_cpu(percpu_timer,cpu)=t;
config_pcpu_timer(t,hrclock_freq);
}
主要是设置几个xenomai相关的precpu变量,ipipe_percpu.hrtimer_irq设置为该evtdev的irq,percpu_timer为该evtdev对应的ipipe_timer,然后计算ipipe_timer中lapic-timer与tsc频率之间的转换因子c2t_integ、c2t_frac;
回到ipipe_select_timers(),通过ipipe给每一个cpu发送一个中断IPIPE_CRITICAL_IPI,将每一个lapic-timer通过ipipe_timer->request设置为oneshot模式。
回到mach_setup(),为每个cpu选出ipipe_timer后获取此时系统信息:ipipe_get_sysinfo(&sysinfo)
intipipe_get_sysinfo(structipipe_sysinfo*info)
{
info->sys_nr_cpus=num_online_cpus();/*运行的cpu数据*/
info->sys_cpu_freq=__ipipe_cpu_freq;/*1000ULL*cpu_khz*/
info->sys_hrtimer_irq=per_cpu(ipipe_percpu.hrtimer_irq,0);/*cpu0的ipipe_timer中断号*/
info->sys_hrtimer_freq=__ipipe_hrtimer_freq;/*time的频率*/
info->sys_hrclock_freq=__ipipe_hrclock_freq;/*1000ULL*cpu_khz*/
return0;
}
在这里还是觉得有问题,CPU和TSC、timer三者频率不一定相等。
这几个变量在接下来初始化xnclock中使用。xnclock_init(cobalt_pipeline.clock_freq):
int__initxnclock_init(unsignedlonglongfreq)
{
xnclock_update_freq(freq);
nktimerlat=xnarch_timer_calibrate();
xnclock_reset_gravity(&nkclock);/*reset_core_clock_gravity*/
xnclock_register(&nkclock,&xnsched_realtime_cpus);
return0;
}
xnclock_update_freq(freq)计算出tsc频率与时间ns单位的转换因子tsc_scale,tsc_shift,计算流程可参考文档实时内核与linux内核时钟漂移过大原因.docx
xnarch_timer_calibrate()计算出每次对硬件timer编程这个执行过程需要多长时间,也就是测量ipipe_timer_set()这个函数的执行时间nktimerlat,计算方法是这样先确保测量这段时间timer不会触发中断干扰,所以先用ipipe_timer_set()给硬件timer设置一个很长的超时值,然后开始测量,先从TSC读取现在的时间tick值t0,然后循环执行100次ipipe_timer_set(),接着从TSC读取现在的时间tick值t1,ipipe_timer_set()平均每次的执行时间是 ,为了算上其他可能的延迟5%,nktimerlat=(t1−t0)/105;
,为了算上其他可能的延迟5%,nktimerlat=(t1−t0)/105;
下面计算对kernel、user、irq xntimer精确定时的gravity,上面已经说过为甚需要这个,xnclock_reset_gravity(&nkclock)调用执行xnclock->ops.reset_gravity(),也就是reset_core_clock_gravity()函数:
staticvoidreset_core_clock_gravity(structxnclock*clock)
{
structxnclock_gravitygravity;
xnarch_get_latencies(&gravity);
gravity.user+=nktimerlat;
if(gravity.kernel==0)
gravity.kernel=gravity.user;
if(gravity.irq==0)
gravity.irq=nktimerlat;
set_core_clock_gravity(clock,&gravity);
}
首先通过xnarch_get_latencies()函数来计算各空间的gravity,其实这个函数里没有具体的计算流程,给的都是一些经验值,要么我们自己编译时配置:
staticinlinevoidxnarch_get_latencies(structxnclock_gravity*p)
{
unsignedlongsched_latency;
#ifCONFIG_XENO_OPT_TIMING_SCHEDLAT!=0
sched_latency=CONFIG_XENO_OPT_TIMING_SCHEDLAT;
#else/*!CONFIG_XENO_OPT_TIMING_SCHEDLAT*/
if(strcmp(ipipe_timer_name(),"lapic")==0){
#ifdefCONFIG_SMP
if(num_online_cpus()>1)
sched_latency=3350;
else
sched_latency=2000;
#else/*!SMP*/
sched_latency=1000;
#endif/*!SMP*/
}elseif(strcmp(ipipe_timer_name(),"pit")){/*HPET*/
#ifdefCONFIG_SMP
if(num_online_cpus()>1)
sched_latency=3350;
else
sched_latency=1500;
#else/*!SMP*/
sched_latency=1000;
#endif/*!SMP*/
}else{
sched_latency=(__get_bogomips()< 250 ? 17000 :
__get_bogomips() < 2500 ? 4200 :
3500);
#ifdef CONFIG_SMP
sched_latency += 1000;
#endif /* CONFIG_SMP */
}
#endif /* !CONFIG_XENO_OPT_TIMING_SCHEDLAT */
p->user=sched_latency;
p->kernel=CONFIG_XENO_OPT_TIMING_KSCHEDLAT;
p->irq=CONFIG_XENO_OPT_TIMING_IRQLAT;
}
首先判断宏CONFIG_XENO_OPT_TIMING_SCHEDLAT 如果不等于0,说明我们自己配置了这个数,直接赋值就行,否则的话,根据xenomai使用的定时器是lapic 还是hept给不同的一些经验值了:
p->user=CONFIG_XENO_OPT_TIMING_SCHEDLAT; p->kernel=CONFIG_XENO_OPT_TIMING_KSCHEDLAT; p->irq=CONFIG_XENO_OPT_TIMING_IRQLAT;
CONFIG_XENO_OPT_TIMING_SCHEDLAT宏在内核编译时设置,默认为0,使用已有的经验值:
[*]Xenomai/cobalt---> Latencysettings---> (0)Userschedulinglatency(ns) (0)Intra-kernelschedulinglatency(ns) (0)Interruptlatency(ns)
实际使用后发现这个经验值也不太准,从测试数据看i5处理器与赛扬就存在差别,如果开启内核trace,就更不准了.
计算出gravity后加上ipipe_timer_set()执行需要的时间nktimerlat,就是最终的gravity。以用户空间实时程序定时为例如下(图中时间段与比例无关):
到此mach_setup()函数中上层软件时钟相关初始化完了,但xenomai还不能直接对硬件timer,此时xenomai进程调度还没初始化,硬件timer与内核调度等息息相关,xenomai内核还不能掌管硬件timer,不能保证linux愉快运行,硬抢过来只能一起阵亡。等xenomai内核任务管理等初始化完毕,给Linux舒适的运行空间,就可以直接控制硬件timer了,下面继续解析这个函数sys_init();
2.5 xenomai接管lapic-timer
sys_init()涉及每个CPU上的调度结构体初始化等。先插以点内容,每个cpu上的xenomai 调度由对象xnsched来管理,xnsched对象每个cpu有一个,其中包含各类sched class,还包含两个xntimer,一个host timer ---htimer,主要给linux定时,另一个循环计时timer rrbtimer;一个xnthead结构rootcb,xenomai调度的是线程,每个实时线程使用xnthead结构表示,这个rootcb表示本cpu上xenomai调度的linux,在双核下linux只是xenomai的一个idle任务,cpu0上xnsched结构如下:
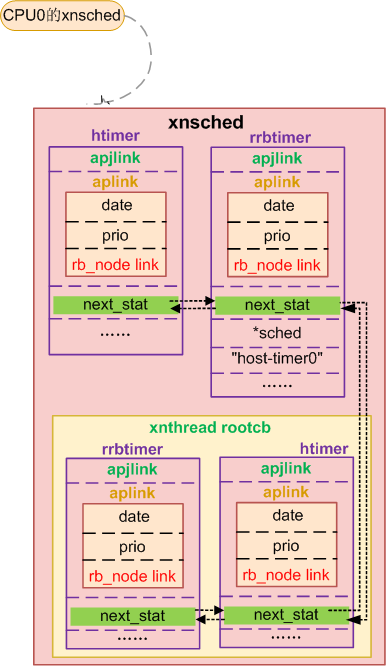
详细的结构后面会分析,这里只解析时钟相关部分。
static__initintsys_init(void)
{
structxnsched*sched;
void*heapaddr;
intret,cpu;
if(sysheap_size_arg==0)
sysheap_size_arg=CONFIG_XENO_OPT_SYS_HEAPSZ;/**/
heapaddr=xnheap_vmalloc(sysheap_size_arg*1024);/*256*1024*/
.....
xnheap_set_name(&cobalt_heap,"systemheap");
for_each_online_cpu(cpu){
sched=&per_cpu(nksched,cpu);
xnsched_init(sched,cpu);
}
#ifdefCONFIG_SMP
ipipe_request_irq(&xnsched_realtime_domain,
IPIPE_RESCHEDULE_IPI,
(ipipe_irq_handler_t)__xnsched_run_handler,
NULL,NULL);
#endif
xnregistry_init();
/*
*Ifstartinginstoppedmode,doallinitializations,butdo
*notenablethecoretimer.
*/
if(realtime_core_state()==COBALT_STATE_WARMUP){
ret=xntimer_grab_hardware();/*霸占硬件host定时器*/
.....
set_realtime_core_state(COBALT_STATE_RUNNING);/*更新实时内核状态*/
}
return0;
}
sys_init()中先初始化内核堆空间,初始化每个CPU上的调度结构体xnsched、创建idle线程,也就是上面说到的roottcb,多cpu核调度等,经过这一些步骤,LInux已经变成xenomai的一个idle线程了,最后调用xntimer_grab_hardware(),接管硬件timer:
intxntimer_grab_hardware(void)
{
structxnsched*sched;
intret,cpu,_cpu;
spl_ts;
.......
nkclock.wallclock_offset=
xnclock_get_host_time()-xnclock_read_monotonic(&nkclock);
ret=xntimer_setup_ipi();ipipe_request_irq(&xnsched_realtime_domain,IPIPE_HRTIMER_IPI,
(ipipe_irq_handler_t)xnintr_core_clock_handler,NULL,NULL);
for_each_realtime_cpu(cpu){
ret=grab_hardware_timer(cpu);
if(ret< 0)
goto fail;
xnlock_get_irqsave(&nklock, s);
sched = xnsched_struct(cpu);
if (ret >1)
xntimer_start(&sched->htimer,ret,ret,XN_RELATIVE);
elseif(ret==1)
xntimer_start(&sched->htimer,0,0,XN_RELATIVE);
#ifdefCONFIG_XENO_OPT_WATCHDOG/*启动看门狗定时器*/
xntimer_start(&sched->wdtimer,1000000000UL,1000000000UL,XN_RELATIVE);
xnsched_reset_watchdog(sched);
#endif
xnlock_put_irqrestore(&nklock,s);
}
......
returnret;
}
注册xnclock时nkclock.wallclock_offset没有设置,现在设置也就是walltime的时间与tsc 的时间偏移。然后注册IPIPE_HRTIMER_IPI中断到xnsched_realtime_domain,9.2xntimer那一节启动一个xntimer需要通知其他cpu处理时发送的IPIPE_HRTIMER_IPI:
intxntimer_setup_ipi(void)
{
returnipipe_request_irq(&xnsched_realtime_domain,
IPIPE_HRTIMER_IPI,
(ipipe_irq_handler_t)xnintr_core_clock_handler,
NULL,NULL);
}
接下来就是重要的为每个cpu接管硬件timer了,其实过程也简单,就是将原来lcock event的一些操作函数替换来达到目的,每个cpu上xenomai调度管理结构xnsched,每个xnsched中有一个定时器htimer,这个xntimer就是为linux服务的,根据底层timer的类型,后启动htimer,htimer 推动linux继时间子系统运行。这些后面会详细解析。回到接管timer函数grab_hardware_timer(cpu):
staticintgrab_hardware_timer(intcpu)
{
inttickval,ret;
ret=ipipe_timer_start(xnintr_core_clock_handler,
switch_htick_mode,program_htick_shot,cpu);
switch(ret){
caseCLOCK_EVT_MODE_PERIODIC:
/*
*Oneshottickemulationcallbackwon'tbeused,ask
*thecallertostartaninternaltimerforemulating
*aperiodictick.
*/
tickval=1000000000UL/HZ;
break;
caseCLOCK_EVT_MODE_ONESHOT:
/*oneshottickemulation*/
tickval=1;
break;
caseCLOCK_EVT_MODE_UNUSED:
/*wedon'tneedtoemulatethetickatall.*/
tickval=0;
break;
caseCLOCK_EVT_MODE_SHUTDOWN:
return-ENODEV;
default:
returnret;
}
returntickval;
}
主要的操作在ipipe_timer_start(xnintr_core_clock_handler,switch_htick_mode, program_htick_shot, cpu),后面的就是判断这个timer工作在什么模式,相应的返回好根据模式设置htimer为linux服务;
ipipe_timer_start(xnintr_core_clock_handler,switch_htick_mode, program_htick_shot, cpu)其中的xnintr_core_clock_handler是lapic-timer 产生中断时xenomai内核的处理函数,里面会去处理每个xntimer以及xenomai调度;switch_htick_mode是lapic-timer工作模式切换函数,program_htick_shot函数是对sched->htimer重新定时的函数,这个函数对linux来说特别重要,以后linux就不直接对硬件timer设置定时了,而是给xenomai中的sched->htimer设置。下面是ipipe_timer_start代码:
intipipe_timer_start(void(*tick_handler)(void),
void(*emumode)(enumclock_event_modemode,
structclock_event_device*cdev),
int(*emutick)(unsignedlongevt,
structclock_event_device*cdev),
unsignedintcpu)
{
structgrab_timer_datadata;
intret;
data.tick_handler=tick_handler;/*xnintr_core_clock_handler*/
data.emutick=emutick;/*program_htick_shot*/
data.emumode=emumode;/*switch_htick_mode*/
data.retval=-EINVAL;
ret=smp_call_function_single(cpu,grab_timer,&data,true);/*执行grab_timer*/
returnret?:data.retval;
}
先将传入的几个函数指正存到结构体data,然后调用smp_call_function_single传给函数grab_timer处理,smp_call_function_single中的smp表示给指定的cpu去执行grab_timer,对应的cpu执行grab_timer(&data):
staticvoidgrab_timer(void*arg)
{
structgrab_timer_data*data=arg;
structclock_event_device*evtdev;
structipipe_timer*timer;
structirq_desc*desc;
unsignedlongflags;
intsteal,ret;
flags=hard_local_irq_save();
timer=this_cpu_read(percpu_timer);
evtdev=timer->host_timer;
ret=ipipe_request_irq(ipipe_head_domain,timer->irq,
(ipipe_irq_handler_t)data->tick_handler,
NULL,__ipipe_ack_hrtimer_irq);
if(ret< 0 && ret != -EBUSY) {
hard_local_irq_restore(flags);
data->retval=ret;
return;
}
steal=evtdev!=NULL&&!clockevent_state_detached(evtdev);
if(steal&&evtdev->ipipe_stolen==0){
timer->real_mult=evtdev->mult;
timer->real_shift=evtdev->shift;
timer->orig_set_state_periodic=evtdev->set_state_periodic;
timer->orig_set_state_oneshot=evtdev->set_state_oneshot;
timer->orig_set_state_oneshot_stopped=evtdev->set_state_oneshot_stopped;
timer->orig_set_state_shutdown=evtdev->set_state_shutdown;
timer->orig_set_next_event=evtdev->set_next_event;
timer->mode_handler=data->emumode;/*switch_htick_mode*/
evtdev->mult=1;
evtdev->shift=0;
evtdev->max_delta_ns=UINT_MAX;
if(timer->orig_set_state_periodic)
evtdev->set_state_periodic=do_set_periodic;
if(timer->orig_set_state_oneshot)
evtdev->set_state_oneshot=do_set_oneshot;
if(timer->orig_set_state_oneshot_stopped)
evtdev->set_state_oneshot_stopped=do_set_oneshot_stopped;
if(timer->orig_set_state_shutdown)
evtdev->set_state_shutdown=do_set_shutdown;
evtdev->set_next_event=data->emutick;/*program_htick_shot*/
evtdev->ipipe_stolen=1;
}
hard_local_irq_restore(flags);
data->retval=get_dev_mode(evtdev);
desc=irq_to_desc(timer->irq);
if(desc&&irqd_irq_disabled(&desc->irq_data))
ipipe_enable_irq(timer->irq);
if(evtdev->ipipe_stolen&&clockevent_state_oneshot(evtdev)){/*启动oneshot*/
ret=clockevents_program_event(evtdev,
evtdev->next_event,true);
if(ret)
data->retval=ret;
}
}
首先从percpu_timer取出我们在ipipe_select_timers选择的那个clockevent device evtdev,现在要这个evtdev为xenomai服务,所以将它的中断注册到ipipe_head_domain,当中断来的时候后ipipe会交给ipipe_head_domain调用data->tick_handler也就是xnintr_core_clock_handler处理,xnintr_core_clock_handler中处理xenomai在本CPU当上的调度、定时等。
在struct clock_event_device中ipipe添加了一个标志位ipipe_stolen用来表示该evtdev是不是已经为实时系统服务,是就是1,否则为0,这里当然为0,先将原来evtdev的操作函数备份到’orig_‘打头的成员变量中,设置ipipe_timer的real_mult、real_shift为evtdev的mult、shift,原evtdev的mult、shift设置为1、0,linux计算的时候才能与xntimer定时时间对应起来。
最重要的是把原来evtdev->set_next_event设置成了program_htick_shot,program_htick_shot如下,从此linux就是对shched->htimer 定时器设置定时,来替代原来的evtdev:
staticintprogram_htick_shot(unsignedlongdelay,
structclock_event_device*cdev)
{
structxnsched*sched;
intret;
spl_ts;
xnlock_get_irqsave(&nklock,s);
sched=xnsched_current();
ret=xntimer_start(&sched->htimer,delay,XN_INFINITE,XN_RELATIVE);/*相对,单次定时*/
xnlock_put_irqrestore(&nklock,s);
returnret?-ETIME:0;
}
其余的最后如果evtdev中断没有使能就使能中断,evtdev是oneshot状态启动oneshot,到此xenomai掌管了lpic-tiemr,从此xenomai内核直接设置lpic-tiemr,lpic-tiemr到时产生中断,ipipe调用执行xnintr_core_clock_handler处理lpic-tiemr中断,xnintr_core_clock_handler处理xenomai时钟系统:
voidxnintr_core_clock_handler(void)
{
structxnsched*sched=xnsched_current();
intcpu__maybe_unused=xnsched_cpu(sched);
xnstat_exectime_t*prev;
if(!xnsched_supported_cpu(cpu)){
#ifdefXNARCH_HOST_TICK_IRQ
ipipe_post_irq_root(XNARCH_HOST_TICK_IRQ);
#endif
return;
}
......
++sched->inesting;/*中断嵌套++*/
sched->lflags|=XNINIRQ;/*在中断上下文状态*/
xnlock_get(&nklock);
xnclock_tick(&nkclock);/*处理一个时钟tick*/
xnlock_put(&nklock);
trace_cobalt_clock_exit(per_cpu(ipipe_percpu.hrtimer_irq,cpu));
xnstat_exectime_switch(sched,prev);
if(--sched->inesting==0){/*如果没有其他中断嵌套,执行从新调度*/
sched->lflags&=~XNINIRQ;
xnsched_run();/*调度*/
sched=xnsched_current();
}
/*
*Ifthecoreclockinterruptpreemptedareal-timethread,
*anytransitiontotherootthreadhasalreadytriggereda
*hosttickpropagationfromxnsched_run(),soatthispoint,
*weonlyneedtopropagatethehosttickincasethe
*interruptpreemptedtherootthread.
*/
if((sched->lflags&XNHTICK)&&
xnthread_test_state(sched->curr,XNROOT))
xnintr_host_tick(sched);
}
xnintr_core_clock_handler中,首先判断产生这个中断的cpu属不属于实时调度cpu,如果不属于,那就把中断post到root域后直接返回,ipipe会在root域上挂起这个中断给linux处理。
如果这是运行xenomai的cpu,接下来调用xnclock_tick(&nkclock),来处理一个时钟tick,里面就是看该cpu上哪些xntimer到期了做相应处理:
voidxnclock_tick(structxnclock*clock)
{
structxnsched*sched=xnsched_current();
structxntimer*timer;
xnsticks_tdelta;
xntimerq_t*tmq;
xnticks_tnow;
xntimerh_t*h;
atomic_only();
......
tmq=&xnclock_this_timerdata(clock)->q;/**/
/*
*Optimisation:anylocaltimerreprogrammingtriggeredby
*invokedtimerhandlerscanwaituntilweleavethetick
*handler.Usethisstatusflagashinttoxntimer_start().
*/
sched->status|=XNINTCK;
now=xnclock_read_raw(clock);
while((h=xntimerq_head(tmq))!=NULL){
timer=container_of(h,structxntimer,aplink);
delta=(xnsticks_t)(xntimerh_date(&timer->aplink)-now);
if(delta>0)
break;
trace_cobalt_timer_expire(timer);
xntimer_dequeue(timer,tmq);
xntimer_account_fired(timer);/*timer->fired++*/
/*
*Bypostponingthepropagationofthelow-priority
*hostticktotheinterruptepilogue(see
*xnintr_irq_handler()),wesavesomeI-cache,which
*translatesintopreciousmicrosecsonlow-endhw.
*/
if(unlikely(timer==&sched->htimer)){
sched->lflags|=XNHTICK;
sched->lflags&=~XNHDEFER;
if(timer->status&XNTIMER_PERIODIC)
gotoadvance;
continue;
}
/*Checkforalockedclockstate(i.e.ptracing).*/
if(unlikely(nkclock_lock>0)){
if(timer->status&XNTIMER_NOBLCK)
gotofire;
if(timer->status&XNTIMER_PERIODIC)
gotoadvance;
/*
*Wehavenoperiodforthisblockedtimer,
*sohaveittickagainatareasonablyclose
*dateinthefuture,waitingfortheclock
*tobeunlockedatsomepoint.Sinceclocks
*areblockedwhensingle-steppingintoan
*applicationusingadebugger,itisfineto
*waitfor250msfortheusertocontinue
*programexecution.
*/
xntimerh_date(&timer->aplink)+=
xnclock_ns_to_ticks(xntimer_clock(timer),
250000000);
gotorequeue;
}
fire:
timer->handler(timer);/******************************/
now=xnclock_read_raw(clock);
timer->status|=XNTIMER_FIRED;
/*
*Onlyrequeueperiodictimerswhichhavenotbeen
*requeued,stoppedorkilled.
*/
if((timer->status&
(XNTIMER_PERIODIC|XNTIMER_DEQUEUED|XNTIMER_KILLED|XNTIMER_RUNNING))!=
(XNTIMER_PERIODIC|XNTIMER_DEQUEUED|XNTIMER_RUNNING))
continue;
advance:
do{
timer->periodic_ticks++;
xntimer_update_date(timer);
}while(xntimerh_date(&timer->aplink)< now);
requeue:
#ifdef CONFIG_SMP
/*
* If the timer was migrated over its timeout handler,
* xntimer_migrate() re-queued it already.
*/
if (unlikely(timer->sched!=sched))
continue;
#endif
xntimer_enqueue(timer,tmq);
}
sched->status&=~XNINTCK;
xnclock_program_shot(clock,sched);
}
xnclock_tick里主要处理各种类型的xntimer,首先取出本cpu上管理xntimer红黑树的根节点xntimerq_t,然后开始处理,为了安全设置sched状态标识status为XNINTCK,标识该sched正在处理tick,得到现在tsc值now,然后一个while循环,取出红黑树上定时最小的那个xntimer,得到这个xntimer的时间date,如果date减去now大于0,说明最短定时的xntimer都没有到期,那就不需要继续处理,直接跳出循环,执行xnclock_program_shot(clock, sched)设置定时器下一个中断触发时间。
如果有xntimer到期,date减去now小于等于0,首先从红黑树中删除,然后xntimer.fire加1,表示xntimer到期次数,然后处理,这里逻辑有点绕:
1.如果是sched->htimer,就是为Linux定时的,先设置sched->lflags |= XNHTICK,这个标志设置的是lflags不是status,因为linux的不是紧急的,后面本cpu没有高优先级实时任务运行才会给linux处理。接着判断是不是一个周期timer,如果是,goto到advance更新timer时间date,可能已将过去几个周期时间了,所有使用循环一个一个周期的增加直到现在时间now,然后重新插入红黑树。
2.如果这个xntimer是一个非阻塞timer,直接跳转fire执行handler,并设置状态已经FIRED。
3.如果这是一个非htimer的周期定时器,那同样更新时间后重新加入红黑树。
4.以上都不是就将xntimer重新定时250ms,加入红黑树。
xnclock_tick执行返回后,xnstat_exectime_switch()更新该cpu上每个域的执行时间,然后如果没有其他中断嵌套则进行任务调度xnsched_run();
不知经过多少个rt任务切换后回到这个上下文,并且当前cpu运行linux,上次离开这linux的定时器htimer还没处理呢,检查如果当前cpu上运行linux,并且sched->lflags中有XNHTICK标志,那将中断通过ipipe post给linux处理,并清除lflags中的XNHTICK,linux中断子系统就会去只执行eventhandler,处理linux时间子系统。
voidxnintr_host_tick(structxnsched*sched)/*Interruptsoff.*/
{
sched->lflags&=~XNHTICK;
#ifdefXNARCH_HOST_TICK_IRQ
ipipe_post_irq_root(XNARCH_HOST_TICK_IRQ);
#endif
}
2.6 xenomai内核下Linux时钟工作流程
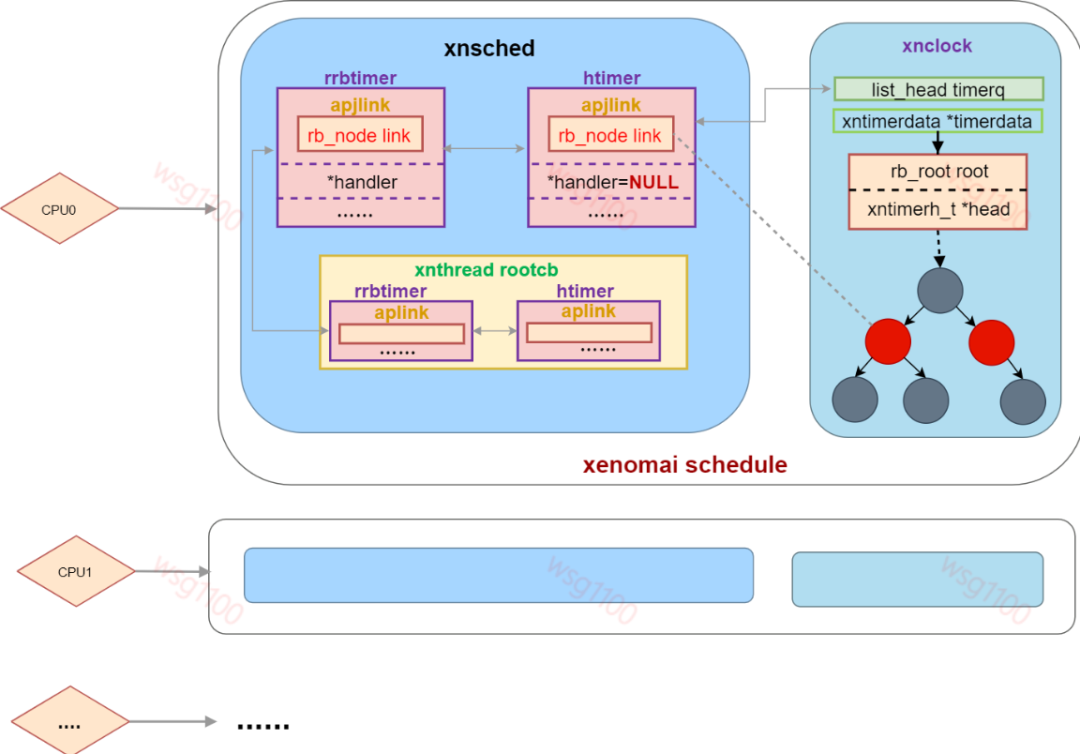
到此时钟系统中除调度相关的外,一个CPU上双核系统时钟流程如下图所示:
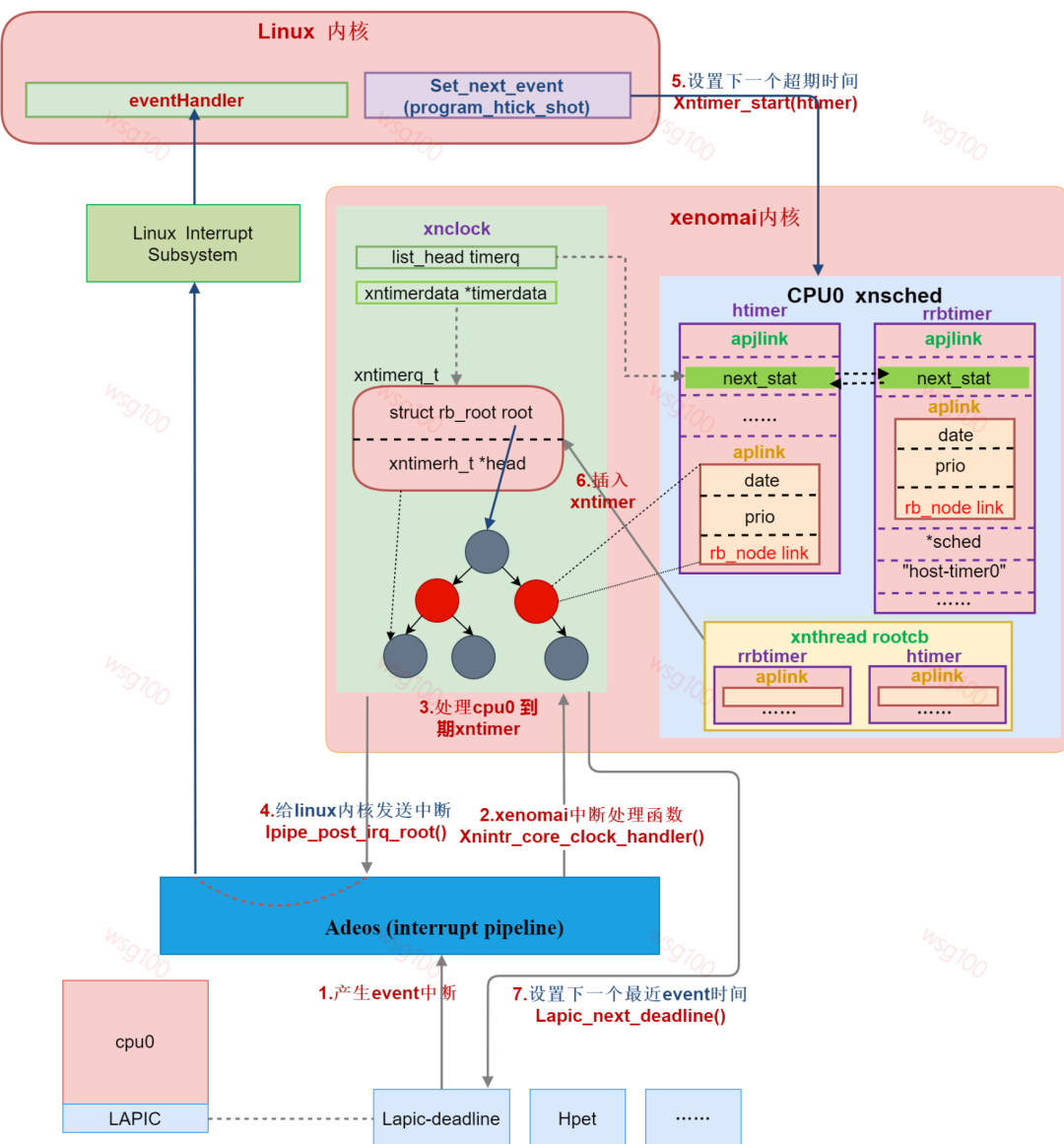
总结:xenomai内核启动时,grab_timer()结合ipipe通过替换回调函数将原linux系统timer lapic-timer作为xenomai 系统timer,xenomai直接对层硬件lapic-timer编程,linux退化为xenomai的idle任务,idle任务的主时钟就变成linux的时钟来源,由linux直接对层硬件lapic-timer编程变成对idle hrtimer编程。idle hrtimer依附于xenomai时钟xnclock,xnclock运作来源于底层硬件lapic-timer。
2.7 gravity
为什么要设置gravity呢?
xenomai是个实时系统必须保证定时器的精确,xntimer都是由硬件timer产生中断后处理的,如果没有gravity,对于用户空间实时任务RT:假如此时时间刻度是0,该任务定时10us后触发定时器,10us后,产生了中断,此时时间刻度为10us,开始处理xntimer,然后切换回内核空间执行调度,最后切换回用户空间,从定时器到期到最后切换回RT也是需要时间的,已经超过RT所定的10us,因此,需要得到定时器超时->回到用户空间的这段时间gravity;不同空间的任务经过的路径不一样,所以针对kernel、user和irq分别计算gravity,当任务定时,定时器到期时间date-gravity才是xntimer的触发时间。当切换回原来的任务时刚好是定时时间。
总结来说是,CPU执行代码需要时间,调度度上下切换需要时间,中断、内核态、用户态需要的时间不一样,需要将中间的这些时间排除,这些时间就是gravity。
2.8 autotune
gravity可以使用xenomai 内核代码中的经验值,还可以内核编译时自定义,除这两种之外,xenomai还提供了一种自动计算的程序autotune,它的使用需要配合内核模块autotune,编译内核时选中编译:
[]Xenomai/cobalt---> Corefeatures---> <>Auto-tuning
程序autotune位于/usr/xenomai/sbin目录下,直接执行会分别计算irq、kernel、user的gravity;
审核编辑:刘清
-
cpu
+关注
关注
68文章
10863浏览量
211741 -
LINUX内核
+关注
关注
1文章
316浏览量
21648 -
时钟中断
+关注
关注
0文章
4浏览量
7700
原文标题:xenomai+linux双内核下的时钟管理机制
文章出处:【微信号:LinuxDev,微信公众号:Linux阅码场】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
[分享]揭开zzz 手机神秘面纱
Arduino为什么只有loop和setup函数,揭开Arduino的神秘面纱--运行机制
苹果iPhone手机神秘面纱被揭开

一加5神秘面纱揭开!外观圆润,双摄2000万
苹果16寸MacBook Pro将于本周揭开神秘面纱
MT-001: 揭开公式(SNR = 6.02N + 1.76dB)的神秘面纱







 工商网监
工商网监
评论