 MCU部署OpenCV的“进阶篇”
MCU部署OpenCV的“进阶篇”
本文是一个小系列的第四篇,MCU部署OpenCV的“进阶篇”,已经发表了“先跑篇”、"配置篇"和“实战篇”稍后会陆续还有“优化篇”,带您牵手OpenCV,进入OpenCV的广阔世界。
上一期小编带着大家简单过了一下OpenCV的API的基本使用方法,并最终在MCU上实际跑了下。相信大家看的一定不是很过瘾,本期小编将和大家一起完全从0开始构建一个基于MCUXPresso的OpenCV测试工程,并部署到MCU上。
提到这儿,可能有朋友会提出质疑:上期不是说过了,基于HelloWorld例程,把那5个可爱的库一股脑放进去就可以了吗?
可能事情并不是这么简单哟!不然,小编可就有凑字+凑篇幅的嫌疑了啊。还请听小编娓娓道来。
我们知道OpenCV是基于C++编写的项目,而我们所常用的Hello_World例程实际上是一个C工程。这样一来,原生的Hello_World的C工程是无法兼容,所编译出的OpenCV库工程的,或者说,工程本身不能支持构建C++工程。
因此,在开始部署之前,要针对性地对工程本身进行一些小小的改造,以添加对于C++的支持。
具体步骤如下:
㊀ 所谓站在巨人的肩膀看得远,先做一些准备工作:
-
SDK代码包:2.11.0 for i.MX RT1170
-
MCUXPresso IDE:11.5.0
-
选取参考例程:SDK_rootoardsevkmimxrt1170demo_appshello_world_demo_cm7
-
准备好5个静态库:libopencv_world, libopenjp2, libjpeg-turbo, libpng, zlib
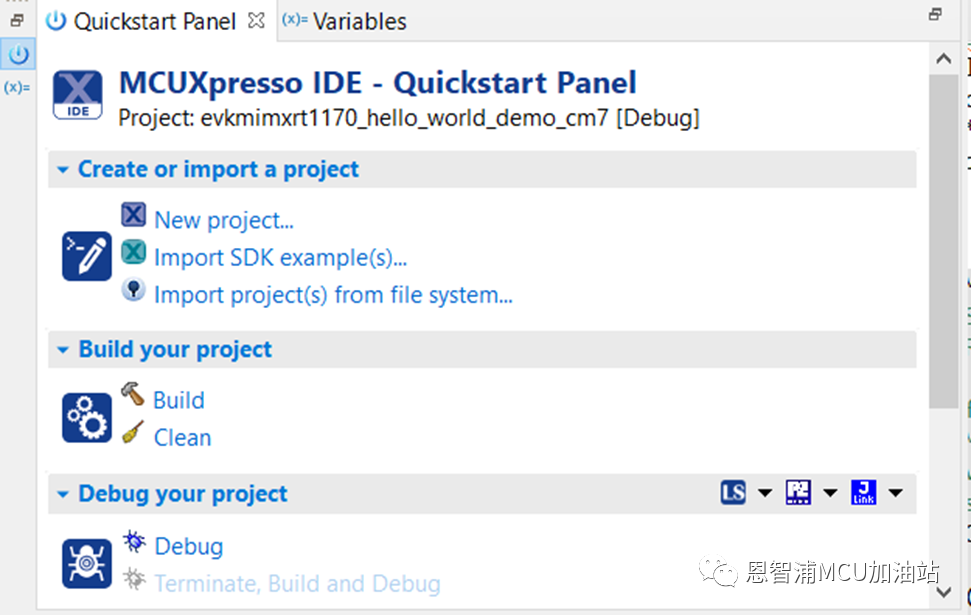
㊁通过Quickstart Panel导入hello world例程:
㊂犀利的操作:添加C++支持,找到工程目录下的.project文件,并添加:
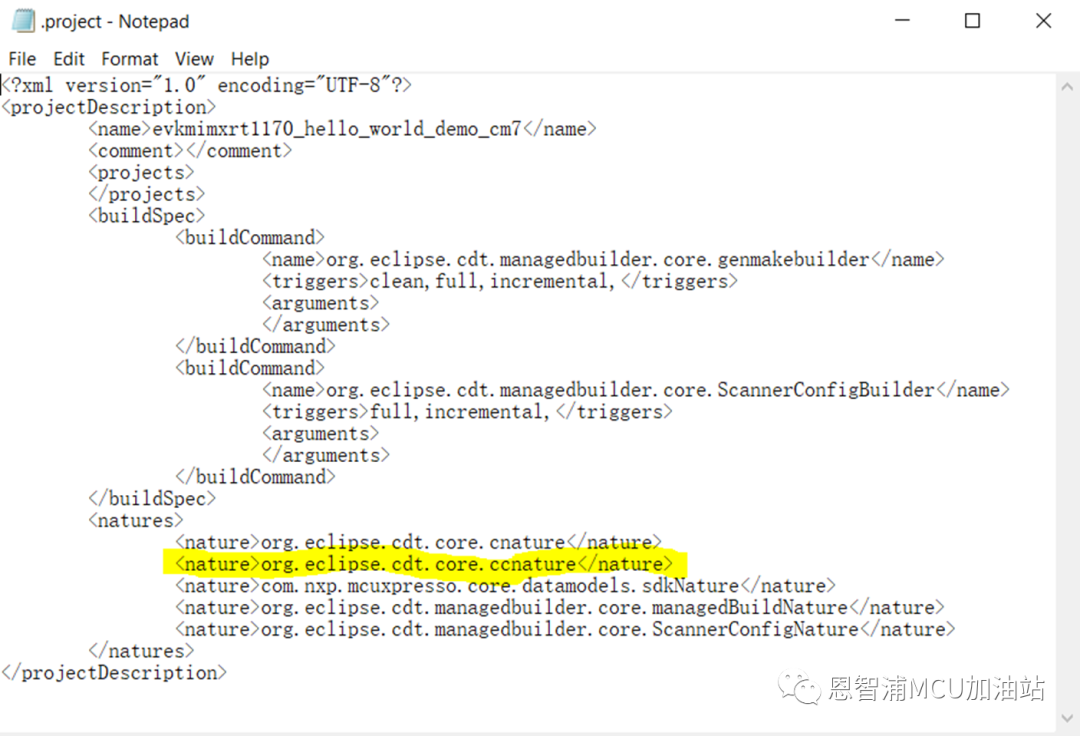
修改好之后,使用MCUXPresso IDE重新打开工程即可开启C++属性。
㊃此时的C++工程属性还是空的,首先是针对MCU C++ Compiler的配置,包括头文件以及预编译符号的添加:
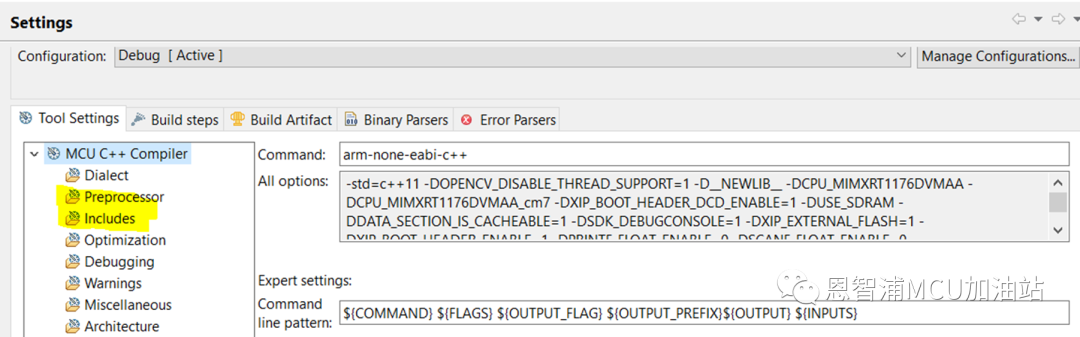
头文件路径如下:
"${workspace_loc:/${ProjName}/drivers}"
"${workspace_loc:/${ProjName}/board}"
"${workspace_loc:/${ProjName}/source}"
"${workspace_loc:/${ProjName}/utilities}"
"${workspace_loc:/${ProjName}/drivers}"
"${workspace_loc:/${ProjName}/device}"
"${workspace_loc:/${ProjName}/component/uart}"
"${workspace_loc:/${ProjName}/component/lists}"
"${workspace_loc:/${ProjName}/startup}"
"${workspace_loc:/${ProjName}/xip}"
"${workspace_loc:/${ProjName}/CMSIS}"
"${workspace_loc:/${ProjName}/utilities}"
"${workspace_loc:/${ProjName}/device}"
"your_cv_pathopencvuild"
" your_cv_path opencvinclude"
" your_cv_path opencvmodulescoreinclude"
" your_cv_path opencvmodulesimgcodecsinclude"
" your_cv_path opencvmodulesimgprocinclude"
" your_cv_path opencvmodulesworldinclude"
" your_cv_path opencvmoduleshighguiinclude"
" your_cv_path opencvmodulesfeatures2dinclude"
" your_cv_path opencvmodulesmlinclude"
" your_cv_path opencvmodulesvideoinclude"OPENCV_DISABLE_THREAD_SUPPORT=1
__NEWLIB__
CPU_MIMXRT1176DVMAA
CPU_MIMXRT1176DVMAA_cm7
XIP_BOOT_HEADER_DCD_ENABLE=1
USE_SDRAM
DATA_SECTION_IS_CACHEABLE=1
SDK_DEBUGCONSOLE=1
XIP_EXTERNAL_FLASH=1
XIP_BOOT_HEADER_ENABLE=1
PRINTF_FLOAT_ENABLE=0
SCANF_FLOAT_ENABLE=0
PRINTF_ADVANCED_ENABLE=0
SCANF_ADVANCED_ENABLE=0
FSL_SDK_DRIVER_QUICK_ACCESS_ENABLE=1
MCUXPRESSO_SDK
CR_INTEGER_PRINTF
__MCUXPRESSO
__USE_CMSIS
DEBUG接下来是MCU C++ Linker的配置,包括所引用的库名字以及库搜索路径:
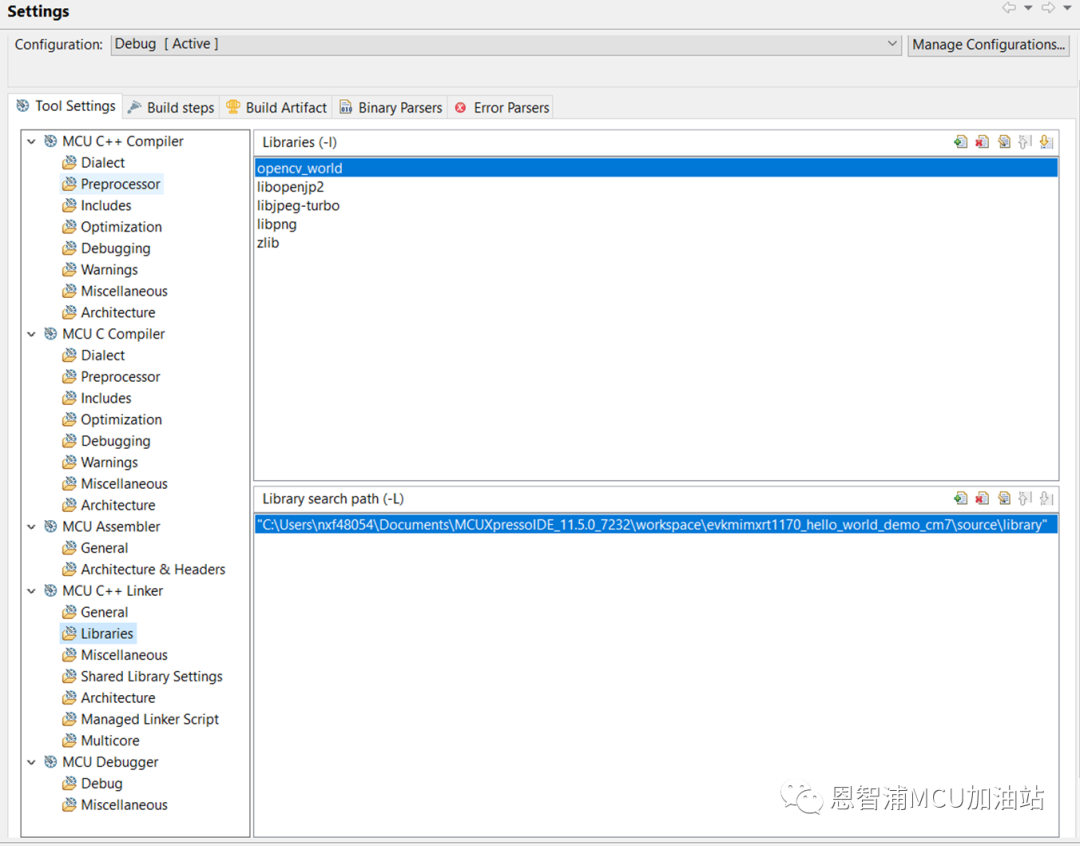
要注意,库的搜索路径就是存放上面那5个库的位置。
㊄ 开启C++编程模式,问:C文件切换成C++文件需要几步?答:只需一步!重命名hello_world.c->hello_world.cc即可。内容可以保存不变。
㊅导入测试数据,包括压缩格式(jpeg,PNG)或是其他未经压缩的原始数据。
考虑到MCU平台一般没有片上的文件系统,或者说没有集成文件系统。那么我们的测试数据就要以RO data的形式直接集成到镜像中。
为了实现这一需求,介绍给大家一个很好用的汇编指令:.incbin,顾名思义,指令本身就好像在隐隐地告诉我们,我就是用来include bin文件的,快点用我。
既然是汇编指令,就要新建一个汇编文件到我们的工程中。新建汇编文件放到哪里,没有特殊要求,但是最好放到和hello_world.cc文件同一级目录下:
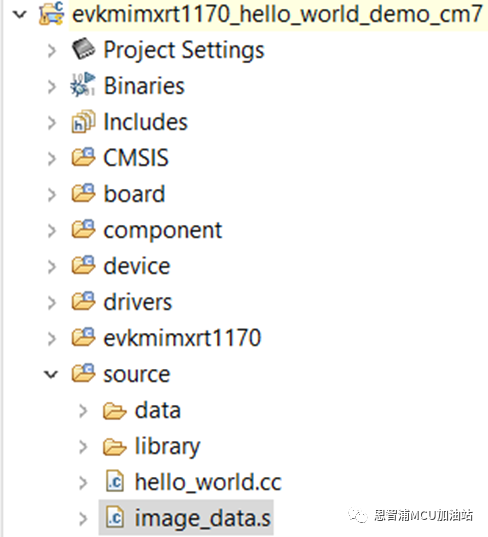
添枝加叶:
.global img_start
.global img_end
img_start:
.incbin "data/lena.jpg"
img_end:具体测试图片的名字可以任意指定,只不过要注意一点。如果想要使用相对路径的话,要保证存储图片的位置要和hello_world.cc的位置一致。
㊆至此,MCUXPresso工程就准备完毕了,下一步就是编写测试代码。要注意,因为我们已经切换到了C++编程模式,就要顺着C++的脾气来。
比较重要的一条是:如果不想重命名hello_world.c,说:我就看.c尾缀舒服。没问题,但是请不要忘了,在声明函数的时候,不要忘了用extern “C”来修饰。否则,会有千千万万个link error向你扑面而来。
接下来开始正式编写测试代码:
㊀包含头文件,你只需要一行即可,如此和谐友善:
#include "opencv2opencv.hpp"㊁OpenCV使用cv::Mat来表征数据,首先我们要声明并初始化cv::Mat实例。
考虑到没有片上文件系统的支持,上文也提到直接使用.incbin导入图片数据。这里,我们就可以使用在汇编文件中所定义的符号对这些数据进行访问。如果是压缩后的图片,需要首先进行解码操作;如果是源数据的话,可以直接使用:extern uint8_t img_start[];
extern uint8_t img_end[];
#define IMG_LEN (img_end - img_start)
// compressed data
std::vector data(img_start, img_start + IMG_LEN);
cv::Mat img = cv::Mat(data), IMREAD_UNCHANGED);
// raw data, need to aware the shape, and also the depth, such as rgb == CV_8UC3, equal to
// each pixel has 3 items, and each item is 8bits
Mat img(Size(480, 360), CV_8UC3);
memcpy(img.data, img_start, IMG_LEN); ㊂寻找物体轮廓并画出:
vector> contours;
vector hierarchy;
findContours(dst, contours, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
// To display the contours
Mat resultImage = Mat ::zeros(dst.size(),CV_8U);
drawContours(resultImage, contours, -1, Scalar(255, 0, 255));
㊃接下来是一个更加复杂的任务,寻找矩形:
参考代码如下:
// returns sequence of squares detected on the image.
static void findSquares( const Mat& image, vector >& squares )
{
squares.clear();
Mat pyr, timg, gray0(image.size(), CV_8U), gray;
// down-scale and upscale the image to filter out the noise
pyrDown(image, pyr, Size(image.cols/2, image.rows/2));
pyrUp(pyr, timg, image.size());
vector > contours;
for( int c = 0; c < 3; c++ )
{
int ch[] = {c, 0};
mixChannels(&timg, 1, &gray0, 1, ch, 1);
// try several threshold levels
for( int l = 0; l < N; l++ )
{
if( l == 0 )
{
Canny(gray0, gray, 0, thresh, 5);
dilate(gray, gray, Mat(), Point(-1,-1));
}
else
{
gray = gray0 >= (l+1)*255/N;
}
findContours(gray, contours, RETR_LIST, CHAIN_APPROX_SIMPLE);
vector approx;
// test each contour
for( size_t i = 0; i < contours.size(); i++ )
{
// approximate contour with accuracy proportional to the contour perimeter
approxPolyDP(contours[i], approx, arcLength(contours[i], true)*0.02, true);
// square contours should have 4 vertices after approximation
if( approx.size() == 4 &&
fabs(contourArea(approx)) > 1000 &&
isContourConvex(approx) )
{
double maxCosine = 0;
for( int j = 2; j < 5; j++ )
{
// find the maximum cosine of the angle between joint edges
double cosine = fabs(angle(approx[j%4], approx[j-2], approx[j-1]));
maxCosine = MAX(maxCosine, cosine);
}
if( maxCosine < 0.3 )
squares.push_back(approx);
}
}
}
}
} ㊄编码图像,这里我们选择利用调试器将编码后的数据从内存download到我们的PC上。关于如何在MCUXPress中进行数据保存的操作,在上一篇文章中已有介绍。
std::vector decoded_img;
cv::imencode(".jpeg", img, decoded_img);
uchar *data = decoded_img.data();
不过,这里有个小坑要提醒给大家,在传递编码格式时候,请不要忘记那个人见人爱的句点“.” 。也就是说,编码格式要写成.jpeg而不是jpeg。小编可是在这上面吃过亏的。
至此,本期小编就给大家介绍了如何从0开始新建一个MCUXPresso工程,并编写OpenCV测试代码进行测试。感兴趣的小伙伴们快动起手来吧!
审核编辑 :李倩
-
mcu
+关注
关注
146文章
17467浏览量
354524 -
C++
+关注
关注
22文章
2115浏览量
74162 -
OpenCV
+关注
关注
31文章
636浏览量
41796
原文标题:这个秋天,OpenCV和MCU更配哟(进阶篇)
文章出处:【微信号:NXP_SMART_HARDWARE,微信公众号:恩智浦MCU加油站】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
零基础开发小安派-Eyes-S1 进阶篇 ——通过屏幕输入连接 Wi-Fi
零基础开发小安派-Eyes-S1【进阶篇】——初识 LVGL 并搭建最小工程

AI模型部署边缘设备的奇妙之旅:如何在边缘端部署OpenCV
AI模型部署边缘设备的奇妙之旅:如何在边缘端部署OpenCV

迅为iTOP-RK3568开发板驱动开发指南-第十八篇 PWM
文档更新 | 迅为RK3568驱动指南-第十七篇(串口)
【《大语言模型应用指南》阅读体验】+ 俯瞰全书
OpenCV图像识别C++代码
opencv-python和opencv一样吗
opencv的主要功能有哪些
文档更新 |迅为 RK3568开发板驱动指南-第十五/十六篇
I.MX6ULL-飞凌 ElfBoard ELF1板卡 - 如何在Ubuntu中编译OpenCV库(X86架构)
嵌入式学习-飞凌ElfBoard ELF 1板卡 - 如何在Ubuntu中编译OpenCV库
ELF 1技术贴|如何在Ubuntu中编译OpenCV库





 工商网监
工商网监
评论