上一期我们分享了基于HPM6750的HMI+四轴伺服电机运动控制方案,这期我们分享一个基于HPM6750的三轴伺服运动控制方案。三轴伺服方案适用于诸多场景,如枕式包装机、三轴机械手系统等应用。
本方案中,X轴、Y轴、Z轴协同工作,在伺服控制中接入插补算法,完成世界地图绘制,如下视频为三轴伺服运动控制下绘制世界地图的过程,1分钟不到绘制一个基本的世界地图。
HPM6750芯片资源介绍
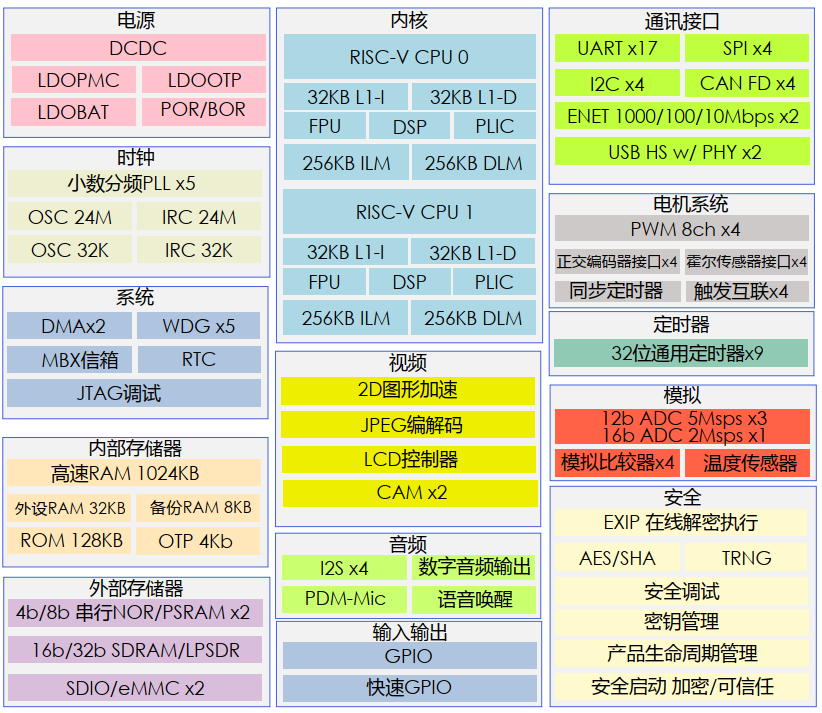
HPM6750采用双RISC-V内核,主频达816MHz,凭借先楫半导体的创新总线架构、高效的L1缓存和本地存储器,创下了MCU高于 9000 CoreMark和 4500以上的DMIPS性能新记录,创造了RISC-V 全球主频和跑分新纪录。除了高算力RISC-V CPU,HPM6700系列产品还创造性地整合了一系列高性能外设,包括支持2D图形加速的显示系统、高速USB、千兆以太网、CAN FD等通讯接口,高速12位和高精度16位模数转换器,面向高性能电机控制和数字电源的运动控制系统。
HPM6750电机控制单元介绍
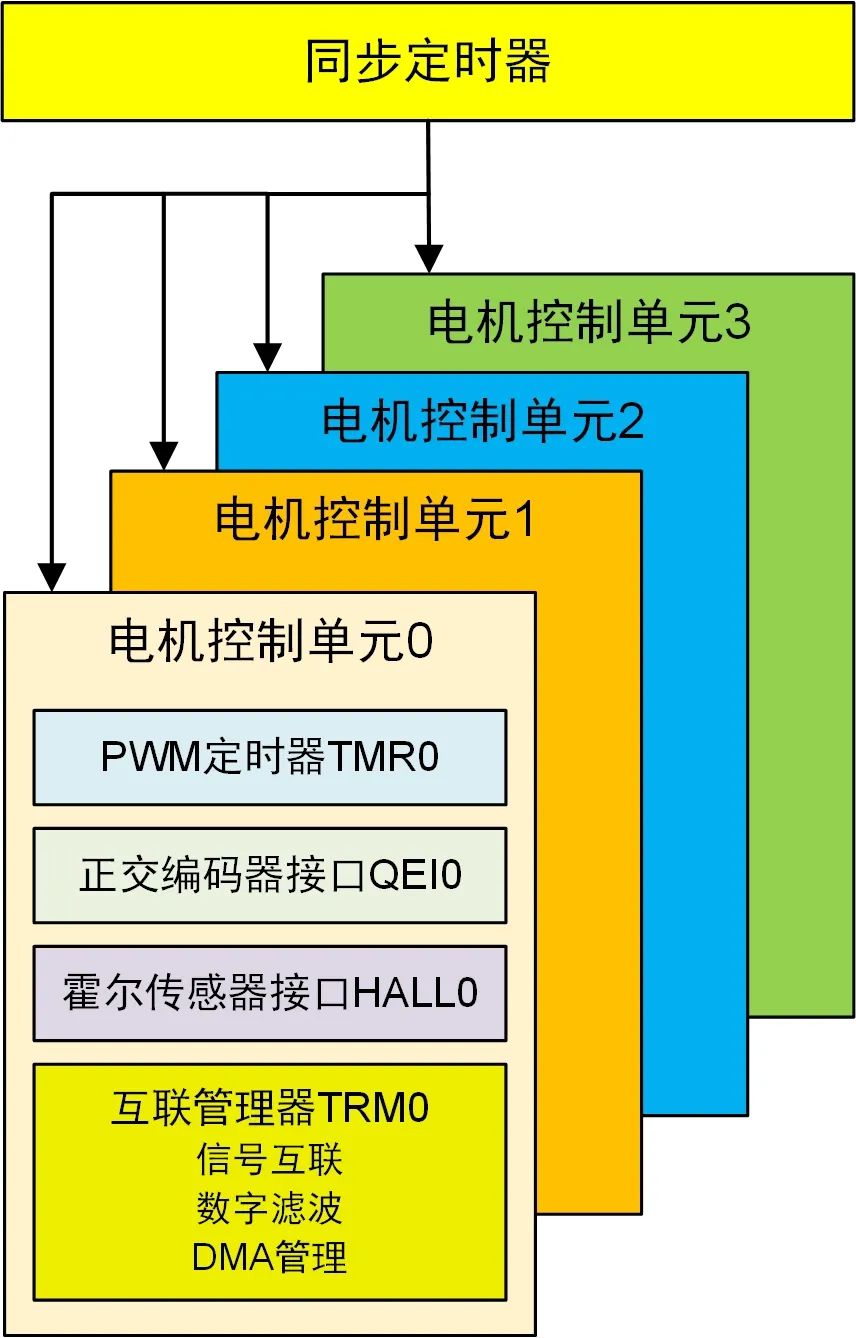
HPM6750系列支持4套电机控制单元,每个单元包括1个PWM定时器,一个正交编码器接口,一个霍尔传感器接口和1个互联管理接口,配合片上提供的模数转换ADC模块和ACMP等外设,可以实现同时控制4个电机;包含1个同步定时器,可以用于4套电机控制单元间进行同步。
1.PWM定时器
支持4个PWM定时器,单个PWM支持高达28位计数,支持24个通道;
2.同步定时器
当计数器计数达到比较值会输出一个比较事件,可以连接到其他定时器用作同步;
3.正交编码器接口QEI
支持4个正交编码器接口QEI,用以测量感应电机位置信息;
4.霍尔传感器接口HALL
支持4个霍尔传感器接口HALL;
5.互联管理TRGM
支持多个外设的输入输出信号可以相互连接,使得多个外设可以相互配合使用;
支持数字滤波,互联管理器支持管理外设DMA请求;
6.模拟外设
支持3个12位ADC,支持20个输入通道,支持单端和差分输入,高达5M采样率;
支持1个16为ADC,支持8个输入通道,高达2M采样率。
审核编辑:郭婷
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
原文标题:三轴伺服运动控制,1分钟绘制世界地图
文章出处:【微信号:立功科技,微信公众号:立功科技】欢迎添加关注!文章转载请注明出处。
相关推荐
本文导读 求远电子基于先楫半导体HPM6E80推出的HPM6E00_EtherCAT_MDR高压伺服EtherCAT从站驱动器方案,提供完善的软硬件参考,可极大的降低产品开发难度,缩短
![的头像]() 发表于
发表于 01-09 15:45
•321次阅读

逻辑控制器(PLC)和伺服电机驱动技术的自动化解决方案。它通过精确控制电机的速度、位置和加速度,实现机器设备的精确运动。这种系统广泛应用于包
![的头像]() 发表于
发表于 12-26 17:32
•518次阅读
了系统的维护成本,实现智能化生产,是现代工业自动化系统中不可或缺的关键组成部分。 国产高性能微控制器产品及解决方案服务商——上海先楫半导体科技有限公司(先楫半导体,HPMicro)研制的HPM6E00
发表于 11-05 13:54
•533次阅读
我正在做一个hpm6750evk2的bootloader。设计很简单,boot工程代码只做跳转到1M后的APP工程代码处,APP工程就是做的一个点灯的程序而已,boot、APP工程都是跑
发表于 10-23 19:01
我正在做一个hpm6750evk2的bootloader。设计很简单,boot工程代码只做跳转到1M后的APP工程代码处,APP工程就是做的一个点灯的程序而已,boot、APP工程都是跑
发表于 10-23 18:59
电子发烧友网站提供《多轴伺服控制的FSI带宽优化应用说明.pdf》资料免费下载
发表于 09-10 10:37
•0次下载

_manufacturing_tool_gui linux 版本 选择 hidraw 连接 HPM6750 芯片,能识别到 hidraw 设备,单击连接是提示重启芯片这个时候会等待超时然后软件报错,此时查看 lsusb 设备是检测不到 hpm6750
发表于 08-07 16:43
技术针对现有市场需求,开发了一种基于VPLC系列机器视觉运动控制一体机的五轴联动点胶解决方案,适用于各种复杂型面工件的高精度点胶和各种胶水。
方案
发表于 07-29 14:29
了运动控制和机器视觉系统的结合,并降低了它们的开发难度和开发成本。在设计这种系统时,了解目前的技术发展、方法以及开发工具会对您的工作提供很大的帮助。 机器视觉控制轴
![的头像]() 发表于
发表于 07-09 08:45
•351次阅读
机器视觉控制轴运动原理是一个复杂而深入的主题。下面将从以下几个方面进行介绍: 机器视觉概述 机器视觉是一种模拟人类视觉的计算机技术,通过图像采集、处理和分析来实现对物体的识别、定位、测量和分类等功能
![的头像]() 发表于
发表于 07-04 10:42
•613次阅读
运动控制卡伺服电机控制是现代工业自动化领域中一项重要的技术,它涉及到运动控制卡、
![的头像]() 发表于
发表于 06-12 14:13
•1002次阅读
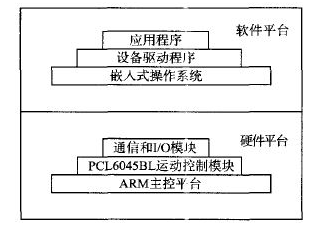
PCL6045BL是一种新型专用DSP运动控制芯片,它具有强大的数据处理能力和较高的运行速度,可以实现高精度的多轴伺服控制。为解决精密制造
发表于 05-03 10:44
•615次阅读
1、新建RTT工程,工程中添加对ADC的驱动:
2、保存工程后,添加测试代码。
3、我们根据原理图上的J10接个,只有PE29是ADC3的输出通道
4、先定义通道、任务
#define ADC_DEV_NAME\"adc3\"/* ADC 设备名称 */
#define ADC_DEV_CHANNEL2/* ADC 通道 */
#define REFER_VOLTAGE 330/* 参考电压 3.3V,数据精度乘以100保留2位小数*/
#define CONVERT_BITS(1 << 16)/* 转换位数为16位 */
5、添加任务:
static void Adc_entry(void* paremeter)
{
rt_adc_device_t adc_dev;
rt_uint32_t value,vol;
rt_err_t ret = RT_EOK;
adc_dev = (rt_adc_device_t)rt_device_find(ADC_DEV_NAME);
if (adc_dev == RT_NULL)
{
rt_kprintf(\"adc sample run failed! can\'t find %s device!\\\\n\", ADC_DEV_NAME);
}
/* 使能设备 */
ret = rt_adc_enable(adc_dev, ADC_DEV_CHANNEL);
if(ret == RT_EOK)
{
rt_kprintf(\"adc sample run success!find %s device!\\\\n\", ADC_DEV_NAME);
}
while(1)
{
/* 读取采样值 */
value = rt_adc_read(adc_dev, ADC_DEV_CHANNEL);
rt_kprintf(\"the value is :%d \\\\n\", value);
/* 转换为对应电压值 */
vol = value * REFER_VOLTAGE / CONVERT_BITS;
rt_kprintf(\"the voltage is :%d.%02d \\\\n\", vol / 100, vol % 100);
rt_thread_delay(500);
}
}
7、在主函数里启用任务
Adc_thread = rt_thread_create(\"adc1\",
Adc_entry,
RT_NULL,
512,
16,
20);
if(Adc_thread != RT_NULL)
rt_thread_startup(Adc_thread);
else
return -1;
发表于 02-17 16:00
拿到HPM6750EVK2,使用jlink下载时,我原来用买jlink配的20转10转接板进行连接,下载程序里一直报不能连接到开发板。经过查找用手册后,找到了问题。
我的jlink的引脚图与之不对
发表于 02-16 10:30
最近入手先辑的HPM6750,需要使用Embedded Studio 编译器来做开发,各位推荐一下学习资料。
发表于 02-04 08:01
 基于HPM6750的三轴伺服运动控制方案
基于HPM6750的三轴伺服运动控制方案





 工商网监
工商网监
评论