 当代自动驾驶产业的起源-DARPA挑战赛
当代自动驾驶产业的起源-DARPA挑战赛
很多人很关心自动驾驶是怎么起源的?为什么人类需要自动驾驶?这就需要先从自动驾驶带给人类的好处说起,我们一般会听到他对人类产生以下好处:
安全,可以减少道路的事故。根据欧美相关政府数据, 94% 的撞车事故的因素是驾驶员的行为或错误。而自动驾驶汽车,由于是机器,所以没有情绪,没有疲劳,没有分心,他可以帮助减少驾驶员的错误,从而增加安全。
节能,可以通过自动驾驶优化速度,规划出行从而可以减少能源损耗。
增效,大规模的使用自动驾驶,可以把人类从驾驶中解放时间,从而提高人类的时间效率。
所以人类会愿意发明与创造去推动此项科技的应用落地发展。例如在无线电通讯蓬勃发展的20世纪初,美国发明家弗朗西斯·胡迪纳(Francis Houdina)就利用无线电技术在美国曼哈顿街道上演示了一辆无人驾驶的汽车。 而后60年代太空竞赛月球登陆车利用摄像头跟随路面开启了基于图像算法的自动驾驶研究时代。 最后DARPA(Defense Advanced Research Projects Agency)在2004年和2005年,2007年分别举行了关于自动驾驶的挑战赛,特别是2007年的Urban Challenge城市挑战赛。开启了自动驾驶产业起源,当前的自动驾驶技术应用都来自于此挑战的概念。

接下来本文将结合DARPA相关资料,重点介绍DARPA挑战赛,并整理以下方面信息:
DARPA挑战赛的起源
DARPA挑战赛的内容
DARPA挑战赛获奖车辆技术
DARPA挑战赛对当前自动驾驶的影响
希望通过以上信息给大家带来一些对于当代自动驾驶的技术发展的信息和启发,如果能引发关于驱动和预测科技的发展进步的思考就太棒了。DARPA挑战赛的起源DARPA挑战赛,先不管这是什么赛事,先看看举办单位DARPA,也就是美国国防部高级研究计划局。好吧摊牌了,当代自动驾驶产业落地的催生萌芽其实是军事。 当然美国还有很多大挑战GrandChallenge,美国认为大挑战可以:
帮助创造未来的产业和就业机会;
扩展人类对我们自己和我们周围世界的知识的前沿;
帮助解决与能源、健康、教育、环境、国家安全和全球发展相关的重要问题;
充当公共和私营部门合作的“北极星”。
这种以国家牵头,向社会开放广泛报名、激发创新的项目,是一个开放和激发社会活力的好项目。 回到DARPA Challenge,其实DARPA挑战赛之前美国DARPA进行了另外一项计划,DARPA Strategic computing program中文就是“战略计算计划”,该计划从 1983 年到 1993年资助了先进计算机硬件和人工智能AI的研究。该计划旨在支持在规定的十年时间内开发机器智能所需的各种项目,包含从芯片设计到制造,计算机体系结构到人工智能软件。美国国防部在该项目上总共花费了 10 亿美元,花费一半在工业界,一半在大学和政府实验室。 当然这项计划也算是受1982年日本的第五代计算机系统的10年计划刺激,第五代计算机系统其实就是当前人工智能火热的智能计算系统,也就是多运算单元组合形成超算系统——而不是之前通过专注于增加单个 CPU 中逻辑元素的数量来增加算力的方式。现在英伟达以及Tesla的Dojo就是采用此类方式,多计算单元CPU和GPU的组合形成超算,其中一个重要的技术是各个运算单元之间的高速接口连接,具体了解可以点击《被美国禁售的A100和H100 ,MI250人工智能芯片能干啥?》和下面视频可以了解第五代计算机系统。 而DARPA Strategic computing program战略计算计划,他的落地应用DARPA设想了三个军事“任务计划”:
给美国陆军开发自动驾驶陆地车辆。
给空军开发飞行员助理,也就是自动飞控系统。
给海军开发航空母舰作战管理系统。
到 20 世纪 80 年代后期,DARPA Strategic computing program战略计算计划催生了计算机、芯片等在美国的大力发展,但是该项目无法成功地创造落地出预期水平的机器智能。DARPA当时的领导人Schwarz认为应该只将资金集中在那些最有希望的技术上。用他的话说,DARPA 应该“冲浪”,而不是“狗桨”,他强烈认为 AI 不是“下一波浪潮”。 而DARPA的自动驾驶汽车落地的是美国武器公司马丁公司(后来并入了鼎鼎大名的军火公司洛克希德·马丁),显然他们当时造出的自动驾驶车辆可能难以量产或者实用。 但彼时2001年,美国深陷阿富汗战争,为了应对路边炸弹引起的大量伤亡,于是美国国会通过了一项法案:在2015年,军方三分之一车辆必须进行无人驾驶。 到2003年,伊拉克战争爆发,无人驾驶技术还没有大的进展。根据法案,国会命令DARPA负责推动相关技术的发展,授权该局对无人驾驶汽车的研发人员进行现金奖励。有了奖金的支持,DARPA决定另辟蹊径,举办一项奖金为100万美元的公开竞赛,吸引更多的团队投入智能车研究。所以从2004到2007年,DARPA共赞助了三场公路赛事,分别是:2004年和2005年DARPA大挑战赛和2007的DARPA城市挑战赛,这几项赛事奠定了当代自动驾驶汽车的技术基础。DARPA挑战赛的内容2004年和2005年DARPA大挑战赛,这两次挑战的基本性质一样,在典型的战地场景,希望汽车能够按照DARPA给出GPS路线避障安全抵达目的地。 2004年3月13日在美国莫哈韦沙漠地区举行的第一届无人驾驶汽车比赛。规定10小时内完成这条 150 英里(240 公里)的越野路线。最后没有一辆机器人车辆完成路线。卡内基梅隆大学红队的车辆行驶了最远的距离,完成了 11.78 公里(7.32 英里)的路线。100万美元的奖金无人认领。

当时美国的头条新闻会嘲笑DARPA挑战赛是一个夸大其词的科学项目。《连线》杂志评论道“挫败:DARPA机器人都倒下了。美国有线电视新闻网写道“没有人赢,甚至没有人接近”。就连《大众科学》杂志也发文指责联邦调查局:“如果 DARPA 明显犯了什么罪,那它就没有管理过高的期望。比赛经理 Negron 在方格旗出现前的几个月里,没有将首届大挑战赛标榜为未准备好黄金时段的现场测试,以校准未来努力所需的内容,而是继续预测胜利者。” DARPA没有一个胜利者,但尴尬的赛事负责人Tether 选择专注于积极的方面。看着这些科技的参与者在沙漠中竞争又聚在一起,交换故事和策略,他并不担心他们留下的钢铁尸体和烧毁的轮胎。这次伟大比赛证明了创造自动驾驶汽车的动力就在那里,而且它找到了有动力实现这一目标的人才。他并不打算放弃。有记者问他现在打算怎么办。“我们会再做一次,”Tether 说。“而这一次,奖金将是 200 万美元。” 于是一年之后,2005年DARPA 大挑战赛开始了,奖金翻倍200万美金。这次无人驾驶汽车比赛是 212 公里(132 英里)的越野赛道。最后195 支队伍中有五支跑完赛道。其中斯坦福大学的汽车“Stanley”以 6 小时 53 分钟的成绩获得第一名,赢得了 200 万美元的奖金。

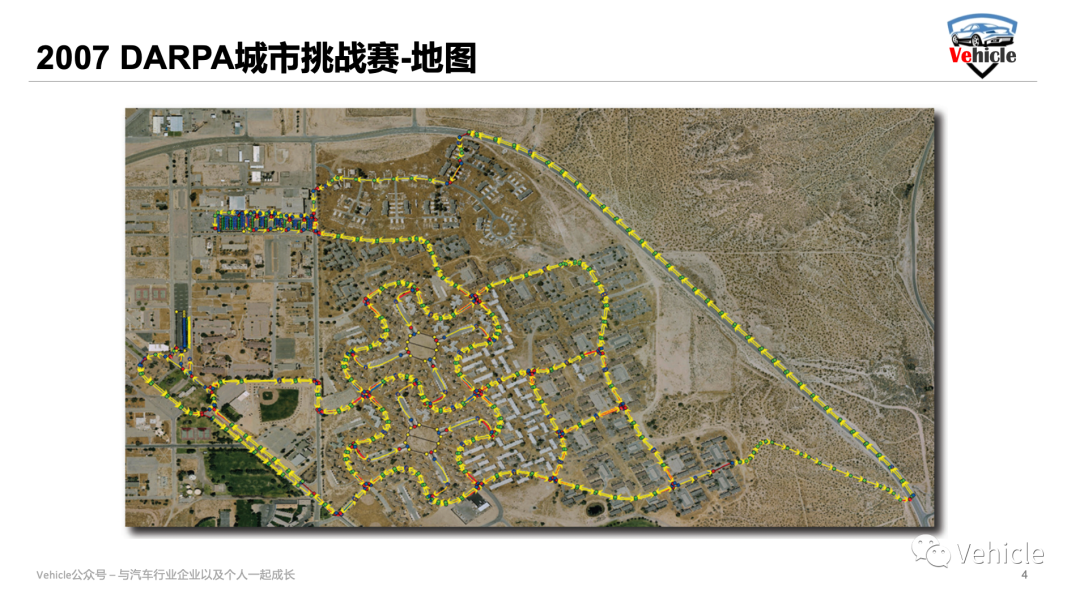
至此2005年DARPA大挑战赛开启了当代自动驾驶汽车的一个里程碑,证明了可行性。但是2004年和2005年的DARPA大挑战赛考验的是给出线路,然后躲避静态障碍,并且所有参赛车辆不会在比赛中有相会的交集。可是现实生活中的自动驾驶车辆必须要能够感知其他动态的交通参与者,并且与其进行互动,最后到达目的地。 所以DARPA决定组织新的挑战,也就是2007 Urban challenge城市挑战赛,他的设计就是为了探索自动驾驶汽车在有其他交通参与者的情况下,进行自动驾驶抵达目的地,也就是推进自动驾驶更贴近现实。 2007年Urban challenge城市挑战赛在美国西部加利福尼亚州维克多维尔,现已关闭的乔治空军基地(目前用作南加州物流机场)所在地举行。此次的奖金共计350万美金,规定在6个小时内完成96公里的路程且最高车速不超过48km/h,里程中重点考察挑战交通中的互动例如:
十字路口
交汇
泊车
脏路面
此次挑战赛11辆自动驾驶汽车参加了最后的决赛,比赛的时候DARPA官方在赛道上增加了30辆带司机的汽车,以增加交通密度。
参赛团队事先对赛道一无所知。DARPA在比赛前24小时向所有车队提供了一份路线网络定义文件(RNDF),RNDF与车载GPS导航系统使用的数字街道地图非常相似,该文件以GPS坐标定义了道路位置、车道数、交叉口甚至停车位位置。比赛当天,每个团队都得到了第二个唯一的文件,称为任务定义文件(MDF)。该文件仅包含RNDF内车辆需要穿越的检查站(或位置)列表,这些车辆必须按照特定顺序访问检查站,就像无人驾驶军车在执行任务时必须执行的操作一样。 最终6辆车汽车完成了比赛,其中3辆按照规定的时间完成,获得奖金。DARPA挑战赛获奖车辆技术最终完成的比赛的有:
卡内基梅隆大学的Boss 用时420第一名; 在整个过程中平均每小时大约 14 英里(22.4 公里/小时)赢得200万美金。
斯坦福大学的Junior 用时428第二名;在整个过程中平均每小时约 13.7 英里(22.0 公里/小时)赢得100万美金。
弗吉尼亚理工大学的Odin用时438第三名;在整个过程中平均速度略低于每小时 13 英里(21 公里/小时).
麻省理工学院的Talos用时大约6个小时第 4 名
另外还有宾夕法尼亚大学的Little Ben和康奈尔大学的Skynet超过 6 小时限制,成功完成挑战线路。所以共计 6 支队伍完成线路。

下图为获奖以及完成比赛的车辆照片,是不是和我们常常在路面上看到的自动驾驶车辆很类似,头顶着激光雷达?另外所有参赛者的感知套件以及机构都非常类似。

根据DARPA的规定,以及提供的路线网络定义文件(RNDF)其实可以认为对于定位,参赛者统一采用其地图(可以认为是高精地图),定位的技术方案也是一样就是利用IMU,GPS还有RTK,可以看到第一名boss的传感器套件里面有Trimble也就是RTK高精定位供应商,目前不少厂家在用。据文献了解当时地图精度0.1米也就是分米,当前商用高精地图也就是厘米级别。 对于感知传感器方面,可以了解下第一名boss的传感器套件

1个最大探测距离70米的机械式360度扫射激光雷达-Velodyne HDL-64 LIDAR (HDL) ,视场角FOV 360 × 26 0.1度角分辨率。
6个最大探测距离80米激光雷达SICK LMS 291-S05/S14 LIDAR (LMS) ,视场角FOV 180/90× 0.9 度,1/0.5角分辨率。用来识别道路以及车道线。
2个探测距离达300m的激光雷达 IBEO Alasca XT LIDAR (XT),视场角FOV 240 × 3.2度。
2个探测距离达150m的激光雷达Continental ISF 172 LIDAR (ISF),视场角FOV 12 × 3.2度。
5个大陆的Continental ARS 300 Radar (ARS)毫米波雷达,FOV 60/17 × 3.2 度,最大探测距离60/200米。显然毫米波雷达是用来探测道路中其他运动车辆。
2个高速黑白摄像头Point Grey Firefly (PGF),视场角为45度。应该是用来识别道路的车道线。
1个GPS+IMU高精定位系统Applanix POS-LV 220/420 GPS/IMU (APLX)
其实查阅资料,基本上完成比赛的6个车采用相同的传感器方案,有的差异只是多少个,放的位置罢了。所以这里可以回到文章讲到的DARPA挑战赛的大背景是Strategic computing program战略计算计划,更多的是挑战基于计算,芯片的软件应用。 对于计算,第一名Boss使用了一个带有10个2.16-GHz Core2Duo处理器的Compact PCI机箱,每个处理器有2 GB内存和一对千兆以太网端口。每台计算机都从一个4 GB闪存驱动器启动,降低了磁盘故障的可能性。其中两台机器还安装了500-GB硬盘用于数据记录。每台计算机还通过定制的每秒脉冲适配器板进行时间同步。也有用8个苹果MAC迷你电脑的。而其他几家也基本差不多,多个计算机运算,整车汽车后备箱塞满了计算机,其实现在自动驾驶开发的工控机类似了。

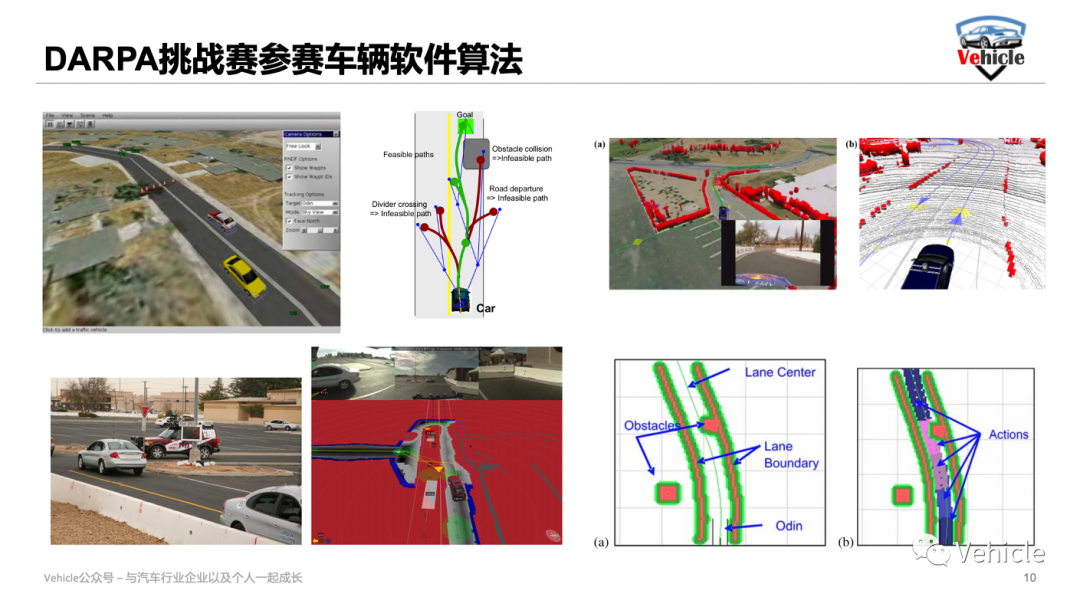
对于软件方面,基本上以Unix/Linux的系统为自动驾驶的运行系统,在商用系统方面Unix/Linux有着工程师们熟悉的各种库,接口和算法调用,来实施感知,规划,当前自动驾驶依然一样。最后是显示,毕竟还需要操作员和监控员,所以显示基于QT的图形用户界面(GUI),为操作员、工程师或测试人员提供了方便,用于启动和停止软件、查看状态/健康信息以及调试正在执行的各种任务的工具。
另外通过对参赛车辆的车身喷涂广告,可以看到计算机的英特尔,我们现在激光雷达的先驱ibeo,Velodyne;视觉算法上车的巨头Moileye,视觉传感器安森美;电子架构专家Vector,汽车雷达巨头们等等。 最后尽管DARPA挑战赛从完成的速度上来看,离实际使用尚有距离,但它确实实现了一些特定的技术目标,例如地面导航的目标。特别是卡内基梅隆大学的自主陆地车辆计划及其姊妹Navlab项目,为随后的许多无人驾驶车辆计划奠定了科学和技术基础,例如 Demo II 和 III 计划(ALV 是演示 I)、感知器和DARPA 大挑战。SCI ALV 计划首创的摄像头加激光雷达和IMU惯性导航装置的使用构成了几乎所有商用无人驾驶汽车的基础。它还在相当大的程度上帮助推进了计算机硬件的技术水平。DARPA挑战赛对当前自动驾驶的影响2007 年 DARPA 城市挑战表明,无人驾驶车辆技术比您想象的更接近。虽然这项技术存在很多缺陷,但对于人类司机来说也是如此。最终现代汽车自动驾驶的技术基础奠定了:
感知,基于激光雷达,摄像头,毫米波雷达等传感器的算法环境感知。
规划,通过各类机器学习的算法进行路径,路线的规划。
定位,基于GPS,通过RTK,IMU结合高精地图(DARPA官方提供的RNDF在线地图)定位。
执行,DARPA的参赛人员花了大量的时间对当时基于液压系统的执行架构转向,制动,换挡进行电气化改装,此项工作当时就筛选了不少人,但当代电动汽车已经全面完全电气化,所以天然奠定电子化执行的基础,也就是当前火热的词电控底盘概念。

后来城市挑战赛中第一名卡内基梅隆大学总结了,当时自动驾驶技术走向商业的一些产业约束有:
商业激光雷达相当昂贵
雷达是高档汽车的选项
摄像头已经被未来汽车考虑应用
计算单元需要越来越快,同时安全运行很重要。
所以大家可以看到以上2007年总结的观点,可以对应到今天,也就是当前自动驾驶硬件发展的一些拦路虎或者大家相互竞争的点。 激光雷达,在中国制造产业的优势引导下,成本持续下探。凭借着受光线影响小、高分辨率等特点成为稳健、高安全自动驾驶必备传感器。另外其在定位方面的独特作用也在各种泊车应用场景大放异彩。目前激光雷达不但“上车了”而且还在“差异化”发展,例如前向远视激光雷达,侧向补盲等。 雷达也就是普通毫米波雷达。已经在辅助驾驶时代普及,目前根据其产业成本优势,在持续进化朝着4D以及更高精度方向发展。 而当时刚刚兴起的摄像头,在互联网时代催生的海量图片以及视频的大数据下,伴随着视觉人工智能算法迅猛发展(80年代互联网还没有大批量民用,所以当时美国战略计算计划的AI缺少广泛参与以及海量数据和应用基础),所以摄像头犹如我之前文章《视觉为王-小鹏以及特斯拉的自动驾驶方案》讲到越发重要。 计算单元,算力TOPs不断的内卷,从个位数到几千的落地,已经给汽车电脑也就是Domain域控制器,不仅仅是计算,还有内存、硬盘、通讯、图像解码等等芯片带来巨大的市场。写在最后当前自动驾驶依然还在产业落地的路途中,而当年第一名卡内基梅隆大学总结的几个约束,其实在当代依然存在;而这些约束本质上又回到DARPA自动驾驶挑战赛的母计划DARPA Strategic computing program(战略计算计划)先进计算机硬件和人工智能AI的研究。在自动驾驶产业中,不管是感知用的芯片,计算用的芯片都属于此类。 而当前地缘政治抬头下,各家对于数据的地缘化,对芯片以及各个产业的逆全球化,已经给自动驾驶产业化带来了更大的挑战,这可能也就是当前自动驾驶产业寒意浓浓的根本源头。但这种地缘化的时代,也同样是催生驱动技术的发展,不过这种发展是地缘化,个体化的。例如DARPA开启于苏美冷战时刻,助力美国计算科技崛起,所以冬天是一个好积蓄的时间点,对于国家,企业,个人都一样。 作为制造和市场都异常巨大的中国,要赢得智能自动驾驶时代可能还需要在类似美国的DARPA Strategic computing program(战略计算计划)上多下功夫。
审核编辑 :李倩
-
算法
+关注
关注
23文章
4619浏览量
93041 -
自动驾驶
+关注
关注
784文章
13853浏览量
166579 -
机器智能
+关注
关注
0文章
55浏览量
8613
原文标题:当代自动驾驶产业的起源-DARPA挑战赛
文章出处:【微信号:阿宝1990,微信公众号:阿宝1990】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
EDA精英挑战赛赛果公布!思尔芯“战队”薪火相承斩获“麒麟杯”

一文聊聊自动驾驶测试技术的挑战与创新

e络盟社区携手恩智浦发起智能空间楼宇自动化挑战赛

2024年ICPC与华为挑战赛冠军杯圆满落幕
PI助力aCentauri车队在太阳能车挑战赛中大放异彩
50万奖金池!开放原子大赛——第二届OpenHarmony创新应用挑战赛正式启动

NVIDIA Research端到端自动驾驶模型引领国际挑战赛
思尔芯赛题正式发布,邀你共战EDA精英挑战赛!
FPGA在自动驾驶领域有哪些优势?
FPGA在自动驾驶领域有哪些应用?
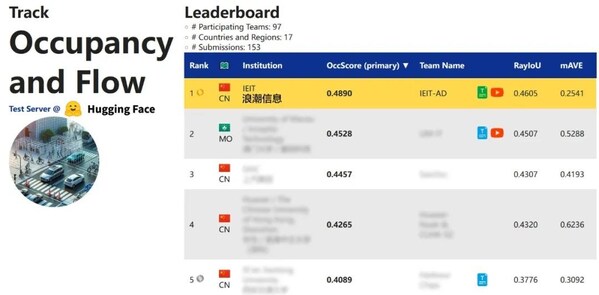
浪潮信息获CVPR2024自动驾驶挑战赛"Occupancy& Flow"冠军
禾赛科技与Momenta签署战略合作,助力自动驾驶行业升级
自动驾驶已成现实?赛思时间同步服务器赋能北京市高级别自动驾驶示范区,为自动驾驶提供中国方案






 工商网监
工商网监
评论