 浅析Linux RTC实时时钟
浅析Linux RTC实时时钟
1. Linux内核RTC驱动简介
RTC 设备驱动是一个标准的字符设备驱动,应用程序通过open、release、read、write和ioctl等函数完成对 RTC 设备的操作内核将 RTC 设备抽象为rtc_device结构体,RTC设备驱动就是申请并初始化rtc_device,最后将 rtc_device 注册到Linux内核里面,此结构体定义在include/linux/rtc.h文件中
structrtc_device
{
structdevicedev;/*设备*/
structmodule*owner;
intid;/*ID*/
charname[RTC_DEVICE_NAME_SIZE];/*名字*/
conststructrtc_class_ops*ops;/*RTC设备底层操作函数*/
structmutexops_lock;
structcdevchar_dev;/*字符设备*/
unsignedlongflags;
......
......
};
结构体中的ops成员变量是RTC设备的底层操作函数集合,是一个 rtc_class_ops 类型的指针变量,需要用户根据所使用的RTC设备编写的,此结构体定义在include/linux/rtc.h 文件中,内容如下
structrtc_class_ops{
int(*open)(structdevice*);
void(*release)(structdevice*);
int(*ioctl)(structdevice*,unsignedint,unsignedlong);
int(*read_time)(structdevice*,structrtc_time*);
int(*set_time)(structdevice*,structrtc_time*);
int(*read_alarm)(structdevice*,structrtc_wkalrm*);
int(*set_alarm)(structdevice*,structrtc_wkalrm*);
int(*proc)(structdevice*,structseq_file*);
int(*set_mmss64)(structdevice*,time64_tsecs);
int(*set_mmss)(structdevice*,unsignedlongsecs);
int(*read_callback)(structdevice*,intdata);
int(*alarm_irq_enable)(structdevice*,unsignedintenabled);
};
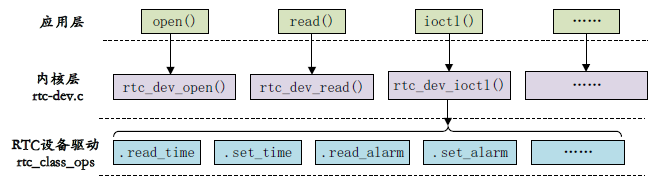
rtc_class_ops 是最底层的 RTC 设备操作函数,并不是提供给应用层的。内核提供了一个 RTC 通用字符设备驱动文件,文件名为 drivers/rtc/rtc-dev.c, 理论提供了所有 RTC 设备共用的 file_operations 函数操作集,如下所示:
staticconststructfile_operationsrtc_dev_fops={
.owner=THIS_MODULE,
.llseek=no_llseek,
.read=rtc_dev_read,
.poll=rtc_dev_poll,
.unlocked_ioctl=rtc_dev_ioctl,
.open=rtc_dev_open,
.release=rtc_dev_release,
.fasync=rtc_dev_fasync,
};
应用程序可以通过 ioctl 函数来设置/读取时间、设置/读取闹钟的操作,那么对应的 rtc_dev_ioctl 函数就会执行,rtc_dev_ioctl 最终会通过操作 rtc_class_ops 中的 read_time、 set_time 等函数来对具体 RTC 设备的读写操作。内核中 RTC 驱动调用流程图如下示
2.Linux内核RTC驱动分析
一般情况下,半导体厂商都会编写好内部RTC驱动,无需我们自已动手编写。但是有必要了解一下是如何编写的打开imx6ull.dtsi,然后找到 snvs_rtc 节点内容,如下所示:
snvs_rtc:snvs-rtc-lp{
compatible="fsl,sec-v4.0-mon-rtc-lp";
regmap=<&snvs>;
offset=<0x34>;
interrupts=19IRQ_TYPE_LEVEL_HIGH>,
20IRQ_TYPE_LEVEL_HIGH>;
};
根据compatible属性值,在Linux源码中搜索"fsl,sec-v4.0-mon-rtc-lp"符串,即可找到对应的驱动文件drivers//rtc/rtc-snvs.c
staticconststructof_device_idsnvs_dt_ids[]={
{.compatible="fsl,sec-v4.0-mon-rtc-lp",},
{/*sentinel*/}
};
MODULE_DEVICE_TABLE(of,snvs_dt_ids);
staticstructplatform_driversnvs_rtc_driver={
.driver={
.name="snvs_rtc",
.pm=SNVS_RTC_PM_OPS,
.of_match_table=snvs_dt_ids,
},
.probe=snvs_rtc_probe,
};
module_platform_driver(snvs_rtc_driver);
可见这是一个标准的platform驱动,当驱动和设备匹配以后snvs_rtc_probe函数就会执行
staticintsnvs_rtc_probe(structplatform_device*pdev){
structsnvs_rtc_data*data;
structresource*res;
intret;
void__iomem*mmio;
data=devm_kzalloc(&pdev->dev,sizeof(*data),GFP_KERNEL);
if(!data)
return-ENOMEM;
data->regmap=syscon_regmap_lookup_by_phandle(pdev->dev.of_node,"regmap");
if(IS_ERR(data->regmap)){
dev_warn(&pdev->dev,"snvsrtc:youuseolddtsfile,pleaseupdateit
");
//从设备树中获取RTC外设寄存器基地址
res=platform_get_resource(pdev,IORESOURCE_MEM,0);
//内存映射,获得RTC外设寄存器物理基地址对应的虚拟地址
mmio=devm_ioremap_resource(&pdev->dev,res);
if(IS_ERR(mmio))
returnPTR_ERR(mmio);
//采用regmap机制来读写RTC底层硬件寄存器
data->regmap=devm_regmap_init_mmio(&pdev->dev,mmio,&snvs_rtc_config);
}else{
data->offset=SNVS_LPREGISTER_OFFSET;
of_property_read_u32(pdev->dev.of_node,"offset",&data->offset);
}
if(!data->regmap){
dev_err(&pdev->dev,"Can'tfindsnvssyscon
");
return-ENODEV;
}
//从设备树中获取RTC的中断号
data->irq=platform_get_irq(pdev,0);
if(data->irq< 0)
returndata->irq;
......
platform_set_drvdata(pdev,data);
//用regmap机制的regmap_write函数完成对寄存器进行写操作
regmap_write(data->regmap,data->offset+SNVS_LPPGDR,SNVS_LPPGDR_INIT);
//清除LPSR寄存器
regmap_write(data->regmap,data->offset+SNVS_LPSR,0xffffffff);
//使能RTC
snvs_rtc_enable(data,true);
device_init_wakeup(&pdev->dev,true);
//请求RTC中断
ret=devm_request_irq(&pdev->dev,data->irq,
snvs_rtc_irq_handler,
IRQF_SHARED,"rtcalarm",&pdev->dev);
if(ret){
dev_err(&pdev->dev,"failedtorequestirq%d:%d
",data->irq,ret);
gotoerror_rtc_device_register;
}
//向系统注册rtc_devcie
data->rtc=devm_rtc_device_register(&pdev->dev,pdev->name,&snvs_rtc_ops,THIS_MODULE);
if(IS_ERR(data->rtc)){
ret=PTR_ERR(data->rtc);
dev_err(&pdev->dev,"failedtoregisterrtc:%d
",ret);
gotoerror_rtc_device_register;
}
return0;
error_rtc_device_register:
if(data->clk)
clk_disable_unprepare(data->clk);
returnret;
}
RTC 底层驱动snvs_rtc_ops操作集包含了读取/设置RTC时间,读取/设置闹钟等函数。其内容如下
staticconststructrtc_class_opssnvs_rtc_ops={
.read_time=snvs_rtc_read_time,
.set_time=snvs_rtc_set_time,
.read_alarm=snvs_rtc_read_alarm,
.set_alarm=snvs_rtc_set_alarm,
.alarm_irq_enable=snvs_rtc_alarm_irq_enable,
};
以 snvs_rtc_read_time 函数为例,介绍RTC底层操作函数该如何去编写,该函数用于读取RTC时间值
staticintsnvs_rtc_read_time(structdevice*dev,structrtc_time*tm){
structsnvs_rtc_data*data=dev_get_drvdata(dev);
//获取RTC计数值,该值是秒数
unsignedlongtime=rtc_read_lp_counter(data);
//将获取到的秒数转换为时间值,也就是rtc_time结构体类型
rtc_time_to_tm(time,tm);
return0;
}
rtc_time 结构体定义如下:
structrtc_time{
inttm_sec;
inttm_min;
inttm_hour;
inttm_mday;
inttm_mon;
inttm_year;
inttm_wday;
inttm_yday;
inttm_isdst;
};
rtc_read_lp_counter 函数,此函数用于读取 RTC 计数值,函数内容如下
staticu32rtc_read_lp_counter(structsnvs_rtc_data*data){
u64read1,read2;
u32val;
//读取RTC_LPSRTCMR和RTC_LPSRTCLR这两个寄存器,得到RTC的计数值
do{
regmap_read(data->regmap,data->offset+SNVS_LPSRTCMR,&val);
read1=val;
read1<<= 32;
regmap_read(data->regmap,data->offset+SNVS_LPSRTCLR,&val);
read1|=val;
regmap_read(data->regmap,data->offset+SNVS_LPSRTCMR,&val);
read2=val;
read2<<= 32;
regmap_read(data->regmap,data->offset+SNVS_LPSRTCLR,&val);
read2|=val;
}while((read1>>CNTR_TO_SECS_SH)!=(read2>>CNTR_TO_SECS_SH));
/*Convert47-bitcounterto32-bitrawsecondcount*/
return(u32)(read1>>CNTR_TO_SECS_SH);
}
3. RTC时间相关设置
RTC 是用来计时的,最基本的就是查看时间,Linux内核启动时可以看到系统时钟设置信息

设置当前时间:date -s
date-s"2022-08-151300"
将当前时间写入到RTC里:hwclock -w

审核编辑 :李倩
-
Linux
+关注
关注
87文章
11219浏览量
208875 -
晶振
+关注
关注
33文章
2819浏览量
67889 -
时钟
+关注
关注
10文章
1720浏览量
131339
原文标题:浅析 Linux RTC 实时时钟
文章出处:【微信号:嵌入式攻城狮,微信公众号:嵌入式攻城狮】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
爱普生RTC实时时钟模块助力车载BMS系统更好运行

实时时钟芯片RTC

适用于智能门锁的低功耗RTC实时时钟模块RX8010SJ

TCXO RTC实时时钟模块的特性





 工商网监
工商网监
评论